基于ModelArts进行流感患者密接排查
摘要:针对疫情期间存在的排查实时性差、排查效率低、无法追踪密接者等问题,可以使用基于YOLOv4的行人检测、行人距离估计、多目标跟踪的方案进行解决。
本文分享自华为云社区《基于ModelArts进行流感患者密接排查》,作者:HWCloudAI。
目前流感病毒患者密接难以排查,尤其是在人流量大的区域,进行排查需要消耗大量人力且需要等待。针对疫情期间存在的排查实时性差、排查效率低、无法追踪密接者等问题,可以使用基于YOLOv4的行人检测、行人距离估计、多目标跟踪的方案进行解决。
1)利用行人重识别技术实现流感病毒患者及密接者识别功能;
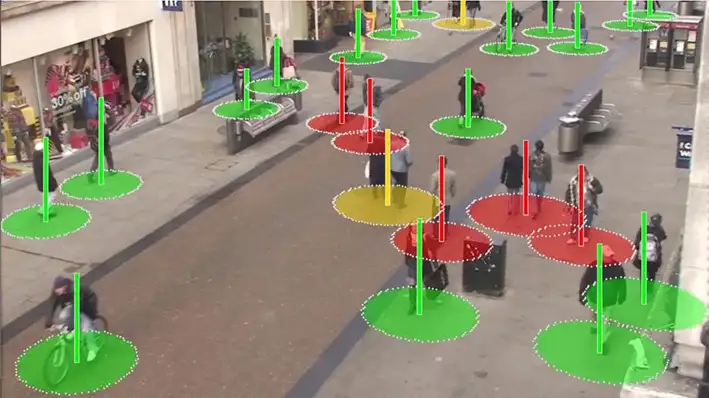
2)结合Stereo-vision以及YOLO算法实现患者的真实密切接触鉴别;
3)利用SORT多目标跟踪算法绘制出患者及密接者的行动轨迹;
该系统可以有效提高防疫效率,减轻经济与防疫压力,提高安全性。
今天将带大家了解 通过华为云ModelArts的 DeepSocial-COVID-19社会距离监测案例实现AI排查新冠密接。
点击链接进入到AI Gallery的“DeepSocial-COVID-19社会距离监测”案例页面,点击Run in ModelArts,即可进入ModelArts Jupyter运行环境,此处需要选用GPU的规格。
注:以下步骤所涉及的代码都已经写好,直接点击代码前面的箭头,让其自动运行即可。
步骤一:从华为云对象存储服务(OBS)拷贝案例所需代码。
# 下载代码和数据
import moxing as mox
mox.file.copy_parallel('obs://obs-aigallery-zc/clf/code/DeepSocial','DeepSocial')
# 引入依赖
from IPython.display import display, Javascript, Image
from base64 import b64decode, b64encode
import os
import cv2
import numpy as np
import PIL
import io
import html
import time
import matplotlib.pyplot as plt
%matplotlib inline
步骤二:在本地编译YOLO。
需要根据运行环境修改Makefile 如是否有GPU等
如果编译报错:/bin/sh:nvcc not found
解决方式(参考):
1)查看nvcc可执行文件的路径
which nvcc
2)修改Makefile文件中的NVCC=nvcc,把nvcc替换为上面查询到的nvcc可执行文件的路径,如:/usr/local/cuda/bin/nvcc
NVCC=/usr/local/cuda/bin/nvcc
%cd DeepSocial
!make
步骤三:使用Darknet的python接口
# import darknet functions to perform object detections
from darknet2 import *
# load in our YOLOv4 architecture network
network, class_names, class_colors = load_network("cfg/yolov4.cfg", "cfg/coco.data", "DeepSocial.weights")
width = network_width(network)
height = network_height(network)
# darknet helper function to run detection on image
def darknet_helper(img, width, height):
darknet_image = make_image(width, height, 3)
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img_resized = cv2.resize(img_rgb, (width, height),
interpolation=cv2.INTER_LINEAR)
# get image ratios to convert bounding boxes to proper size
img_height, img_width, _ = img.shape
width_ratio = img_width/width
height_ratio = img_height/height
# run model on darknet style image to get detections
copy_image_from_bytes(darknet_image, img_resized.tobytes())
detections = detect_image(network, class_names, darknet_image)
free_image(darknet_image)
return detections, width_ratio, height_ratio
步骤四:使用SORT来实时跟踪目标
!pip install filterpy
from sort import *
mot_tracker = Sort(max_age=25, min_hits=4, iou_threshold=0.3)
步骤五:输入设置
Input = "OxfordTownCentreDataset.avi" # 需要检测的适配
ReductionFactor = 2 # 采样因子
calibration = [[180,162],[618,0],[552,540],[682,464]] # 相机标定的参数
步骤六:DeepSocial参数设置和函数引入
from deepsocial import *
######################## Frame number
StartFrom = 0
EndAt = 500 #-1 for the end of the video
######################## (0:OFF/ 1:ON) Outputs
CouplesDetection = 1 # Enable Couple Detection
DTC = 1 # Detection, Tracking and Couples
SocialDistance = 1
CrowdMap = 1
# MoveMap = 0
# ViolationMap = 0
# RiskMap = 0
######################## Units are Pixel
ViolationDistForIndivisuals = 28
ViolationDistForCouples = 31
####
CircleradiusForIndivsual = 14
CircleradiusForCouples = 17
########################
MembershipDistForCouples = (16 , 10) # (Forward, Behind) per Pixel
MembershipTimeForCouples = 35 # Time for considering as a couple (per Frame)
######################## (0:OFF/ 1:ON)
CorrectionShift = 1 # Ignore people in the margins of the video
HumanHeightLimit = 200 # Ignore people with unusual heights
########################
Transparency = 0.7
######################## Output Video's path
Path_For_DTC = os.getcwd() + "/DeepSOCIAL DTC.mp4"
Path_For_SocialDistance = os.getcwd() + "/DeepSOCIAL Social Distancing.mp4"
Path_For_CrowdMap = os.getcwd() + "/DeepSOCIAL Crowd Map.mp4"
def extract_humans(detections):
detetcted = []
if len(detections) > 0: # At least 1 detection in the image and check detection presence in a frame
idList = []
id = 0
for label, confidence, bbox in detections:
if label == 'person':
xmin, ymin, xmax, ymax = bbox2points(bbox)
id +=1
if id not in idList: idList.append(id)
detetcted.append([int(xmin), int(ymin), int(xmax), int(ymax), idList[-1]])
return np.array(detetcted)
def centroid(detections, image, calibration, _centroid_dict, CorrectionShift, HumanHeightLimit):
e = birds_eye(image.copy(), calibration)
centroid_dict = dict()
now_present = list()
if len(detections) > 0:
for d in detections:
p = int(d[4])
now_present.append(p)
xmin, ymin, xmax, ymax = d[0], d[1], d[2], d[3]
w = xmax - xmin
h = ymax - ymin
x = xmin + w/2
y = ymax - h/2
if h < HumanHeightLimit:
overley = e.image
bird_x, bird_y = e.projection_on_bird((x, ymax))
if CorrectionShift:
if checkupArea(overley, 1, 0.25, (x, ymin)):
continue
e.setImage(overley)
center_bird_x, center_bird_y = e.projection_on_bird((x, ymin))
centroid_dict[p] = (
int(bird_x), int(bird_y),
int(x), int(ymax),
int(xmin), int(ymin), int(xmax), int(ymax),
int(center_bird_x), int(center_bird_y))
_centroid_dict[p] = centroid_dict[p]
return _centroid_dict, centroid_dict, e.image
def ColorGenerator(seed=1, size=10):
np.random.seed = seed
color=dict()
for i in range(size):
h = int(np.random.uniform() *255)
color[i]= h
return color
def VisualiseResult(_Map, e):
Map = np.uint8(_Map)
histMap = e.convrt2Image(Map)
visualBird = cv2.applyColorMap(np.uint8(_Map), cv2.COLORMAP_JET)
visualMap = e.convrt2Image(visualBird)
visualShow = cv2.addWeighted(e.original, 0.7, visualMap, 1 - 0.7, 0)
return visualShow, visualBird, histMap
步骤七:推理过程
cap = cv2.VideoCapture(Input)
frame_width = int(cap.get(3))
frame_height = int(cap.get(4))
height, width = frame_height // ReductionFactor, frame_width // ReductionFactor
print("Video Reolution: ",(width, height))
if DTC: DTCVid = cv2.VideoWriter(Path_For_DTC, cv2.VideoWriter_fourcc(*'X264'), 30.0, (width, height))
if SocialDistance: SDimageVid = cv2.VideoWriter(Path_For_SocialDistance, cv2.VideoWriter_fourcc(*'X264'), 30.0, (width, height))
if CrowdMap: CrowdVid = cv2.VideoWriter(Path_For_CrowdMap, cv2.VideoWriter_fourcc(*'X264'), 30.0, (width, height))
colorPool = ColorGenerator(size = 3000)
_centroid_dict = dict()
_numberOFpeople = list()
_greenZone = list()
_redZone = list()
_yellowZone = list()
_final_redZone = list()
_relation = dict()
_couples = dict()
_trackMap = np.zeros((height, width, 3), dtype=np.uint8)
_crowdMap = np.zeros((height, width), dtype=np.int)
_allPeople = 0
_counter = 1
frame = 0
while True:
print('-- Frame : {}'.format(frame))
prev_time = time.time()
ret, frame_read = cap.read()
if not ret: break
frame += 1
if frame <= StartFrom: continue
if frame != -1:
if frame > EndAt: break
frame_resized = cv2.resize(frame_read,(width, height), interpolation=cv2.INTER_LINEAR)
image = frame_resized
e = birds_eye(image, calibration)
detections, width_ratio, height_ratio = darknet_helper(image, width, height)
humans = extract_humans(detections)
track_bbs_ids = mot_tracker.update(humans) if len(humans) != 0 else humans
_centroid_dict, centroid_dict, partImage = centroid(track_bbs_ids, image, calibration, _centroid_dict, CorrectionShift, HumanHeightLimit)
redZone, greenZone = find_zone(centroid_dict, _greenZone, _redZone, criteria=ViolationDistForIndivisuals)
if CouplesDetection:
_relation, relation = find_relation(e, centroid_dict, MembershipDistForCouples, redZone, _couples, _relation)
_couples, couples, coupleZone = find_couples(image, _centroid_dict, relation, MembershipTimeForCouples, _couples)
yellowZone, final_redZone, redGroups = find_redGroups(image, centroid_dict, calibration, ViolationDistForCouples, redZone, coupleZone, couples , _yellowZone, _final_redZone)
else:
couples = []
coupleZone = []
yellowZone = []
redGroups = redZone
final_redZone = redZone
if DTC:
DTC_image = image.copy()
_trackMap = Apply_trackmap(centroid_dict, _trackMap, colorPool, 3)
DTC_image = cv2.add(e.convrt2Image(_trackMap), image)
DTCShow = DTC_image
for id, box in centroid_dict.items():
center_bird = box[0], box[1]
if not id in coupleZone:
cv2.rectangle(DTCShow,(box[4], box[5]),(box[6], box[7]),(0,255,0),2)
cv2.rectangle(DTCShow,(box[4], box[5]-13),(box[4]+len(str(id))*10, box[5]),(0,200,255),-1)
cv2.putText(DTCShow,str(id),(box[4]+2, box[5]-2),cv2.FONT_HERSHEY_SIMPLEX,.4,(0,0,0),1,cv2.LINE_AA)
for coupled in couples:
p1 , p2 = coupled
couplesID = couples[coupled]['id']
couplesBox = couples[coupled]['box']
cv2.rectangle(DTCShow, couplesBox[2:4], couplesBox[4:], (0,150,255), 4)
loc = couplesBox[0] , couplesBox[3]
offset = len(str(couplesID)*5)
captionBox = (loc[0] - offset, loc[1]-13), (loc[0] + offset, loc[1])
cv2.rectangle(DTCShow,captionBox[0],captionBox[1],(0,200,255),-1)
wc = captionBox[1][0] - captionBox[0][0]
hc = captionBox[1][1] - captionBox[0][1]
cx = captionBox[0][0] + wc // 2
cy = captionBox[0][1] + hc // 2
textLoc = (cx - offset, cy + 4)
cv2.putText(DTCShow, str(couplesID) ,(textLoc),cv2.FONT_HERSHEY_SIMPLEX,.4,(0,0,0),1,cv2.LINE_AA)
DTCVid.write(DTCShow)
if SocialDistance:
SDimage, birdSDimage = Apply_ellipticBound(centroid_dict, image, calibration, redZone, greenZone, yellowZone, final_redZone, coupleZone, couples, CircleradiusForIndivsual, CircleradiusForCouples)
SDimageVid.write(SDimage)
if CrowdMap:
_crowdMap, crowdMap = Apply_crowdMap(centroid_dict, image, _crowdMap)
crowd = (crowdMap - crowdMap.min()) / (crowdMap.max() - crowdMap.min())*255
crowd_visualShow, crowd_visualBird, crowd_histMap = VisualiseResult(crowd, e)
CrowdVid.write(crowd_visualShow)
cv2.waitKey(3)
print('::: Analysis Completed')
cap.release()
if DTC: DTCVid.release(); print("::: Video Write Completed : ", Path_For_DTC)
if SocialDistance: SDimageVid.release() ; print("::: Video Write Completed : ", Path_For_SocialDistance)
if CrowdMap: CrowdVid.release() ; print("::: Video Write Completed : ", Path_For_CrowdMap)
步骤八:展示结果
from IPython.display import HTML
outpath = "DeepSOCIAL DTC.mp4"
mp4 = open(outpath,'rb').read()
data_url = "data:video/mp4;base64," + b64encode(mp4).decode()
HTML("""
<video width=400 controls>
<source src="%s" type="video/mp4">
</video>
""" % data_url)
<iframe src="https://obs-aigallery-zc.obs.cn-north-4.myhuaweicloud.com/clf/code/DeepSocial/DeepSOCIAL%20DTC.mp4" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true" height=450 width=800> </iframe> <iframe src="https://obs-aigallery-zc.obs.cn-north-4.myhuaweicloud.com/clf/code/DeepSocial/DeepSOCIAL%20Social%20Distancing.mp4" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true" height=450 width=800> </iframe>
如果想要更好的效果,如何进行优化呢?
1.使用精确度更高的检测算法YOLOv7,使用追踪效果更好的Deep SORT;
2.使用更多数据进行训练
本次介绍就到这里啦,大家快去Gallery实操一下吧!
基于ModelArts进行流感患者密接排查的更多相关文章
- 实践案例丨基于ModelArts AI市场算法MobileNet_v2实现花卉分类
概述 MobileNetsV2是基于一个流线型的架构,它使用深度可分离的卷积来构建轻量级的深层神经网,此模型基于 MobileNetV2: Inverted Residuals and Linear ...
- Hadoop完全分布式环境搭建(二)——基于Ubuntu16.04设置免密登录
在Windows里,使用虚拟机软件Vmware WorkStation搭建三台机器,操作系统Ubuntu16.04,下面是IP和机器名称. [实验目标]:在这三台机器之间实现免密登录 1.从主节点可以 ...
- SM2国密证书合法性验证
通常我们遇到过的X509证书都是基于RSA-SHA1算法的,目前国家在大力推行国密算法,未来银行发行的IC卡也都是基于PBOC3.0支持国密算法的,因此我们来学习一下如何验证SM2国密证书的合法性.至 ...
- Linux中SSH服务基于key认证实践
众所周知ssh是目前较可靠,专为远程登录会话和其他网络服务提供安全性的协议,它默认工作在tcp的22号端口,具体实现的软件有:openssh(centos默认安装的),dropbear.ssh协议目前 ...
- Modelarts与无感识别技术生态总结(浅出版)
[摘要] Modelarts技术及相关产业已成为未来AI与大数据重点发展行业模式之一,为了促进人工智能领域科学技术快速发展,modelarts现状及生态前景成为研究热点.笔者首先总结modelarts ...
- 华为云ModelArts 2.0全面升级,革新传统AI开发模式
[中国,上海,9月20日] 在HUAWEI CONNECT 2019期间,华为云EI服务产品部总经理贾永利宣布--华为云AI重装升级,并重磅发布一站式AI开发管理平台ModelArts 2.0. 现场 ...
- 自动驾驶轻松开发?华为云ModelArts赋能智慧出行
作为战略新兴产业,人工智能已经开始广泛应用于多个领域.近几年,科技公司.互联网公司等各领域的企业纷纷布局自动驾驶.那么,自动驾驶技术究竟发展得如何了?日前,华为云携手上海交通大学创新中心举办的华为云人 ...
- 本科阶段就挑战自动驾驶开发?华为云ModelArts帮你轻松实现!
欢迎添加华为云小助手微信(微信号:HWCloud002 或 HWCloud003),输入关键字"加群",加入华为云线上技术讨论群:输入关键字"最新活动",获取华 ...
- 快快使用ModelArts,零基础小白也能玩转AI!
摘要: 走过路过不要错过,看Copy攻城狮如何借力华为云ModelArts玩转AI. "自2018年10月发布以来,ModelArts累计服务了众多行业十几万开发者,通过基础平台的完备性和面 ...
- “体检医生”黑科技|让AI开发更精准,ModelArts更新模型诊断功能
摘要:华为云AI开发平台ModelArts黑科技加持AI研发,让模型开发更高效.更简单,降低AI在行业的落地门槛.全面的可视化评估以及智能诊断功能,使得开发者可以直观了解模型各方面性能,从而进行针对性 ...
随机推荐
- nginx中一个请求匹配到多个location时的优先级问题,马失前蹄了
背景 为什么讲这么小的一个问题呢?因为今天在进行系统上线的时候遇到了这个问题. 这次的上线动作还是比较大的,由于组织架构拆分,某个接入层服务需要在两个部门各自独立部署,以避免频繁的跨部门沟通,提升该接 ...
- 为.NET打开新大门:OpenVINO.NET开源项目全新发布
为.NET打开新大门:OpenVINO.NET开源项目全新发布 在AI的应用越来越广泛的今天,优化深度学习模型并进行推理部署已经成为了一门必要的技术.Intel开发的OpenVINO工具包(Open ...
- Python - 字典3
修改字典项 您可以通过引用其键名来更改特定项的值: 示例,将 "year" 更改为 2018: thisdict = { "brand": "Ford ...
- dig 简明教程
哈喽大家好,我是咸鱼 不知道大家在日常学习或者工作当中用 dig 命令多不多 dig 是 Domain Information Groper 的缩写,对于网络管理员和在域名系统(DNS)领域工作的小伙 ...
- Ubuntu18.04环境下安装redis 6.2.0,配置文件的部分参数说明
环境是win11的Linux子系统Ubuntu-18.04,安装方式是源码安装,也可以用apt安装(见本文最后参考资料),用的用户是默认用户(所以一些关键命令要注意用sudo,不用会报错) 安装: j ...
- Kubernetes网络
kubernetes-Service 1.service存在的意义 1.防止破的失联(服务发现) 2.定义一组pod的访问策略(提供负载均衡) 2.pod与service的关系 1.通过lablel- ...
- 为何 DevOps 会给开发人员带来压力和倦怠?
企业正在享受 DevOps 实施带来的好处,但这也是有代价的.开发人员需要承担额外的责任,可能会导致他们感到疲惫不堪.因此我们可以采取一些方法来确保 DevOps 工程师的满意度. DevOps 的支 ...
- 微信小程序:音乐播放器
音乐资源使用的是QQ音乐资源.图片资源使用的网易云音乐的专辑图片. HTML: <view class="container"> <div wx:for=&quo ...
- Neural Networks投稿要求总结
自用,NN投稿要求,相关的部分的中文版翻译,原文链接:https://www.sciencedirect.com/journal/neural-networks/publish/guide-for-a ...
- mysql group by 执行原理及千万级别count 查询优化
大家好,我是蓝胖子,前段时间mysql经常碰到慢查询报警,我们线上的慢sql阈值是1s,出现报警的表数据有 7000多万,经常出现报警的是一个group by的count查询,于是便开始着手优化这块, ...