【论文阅读】A practical algorithm for distributed clustering and outlier detection
文章提出了一种分布式聚类的算法,这是第一个有理论保障的考虑离群点的分布式聚类算法(文章里自己说的).与之前的算法对比有以下四个优点:
1.耗时短O(max{k,logn}*n),
2.传递信息规模小:对抗分区O(klogn+t),随机分区O(klogn+t/s)
3.算法有良好的近似保证,
4.能够有效的检测出离群点.
其中,k聚类中心个数,n数据集大小,t离群点个数,s站点数(分区个数)
符号说明:

算法总体描述:
文中提出的算法分为两个阶段,第一阶段的算法是在[1]中改进,将[1]中纯净的数据集替换成了带离群点的数据集,算法中增加了离群点的考虑.第二阶段使用的是[2]中提出的k-means—算法.由于第二阶段的算法是现成的,文章重点讲述第一阶段的算法.
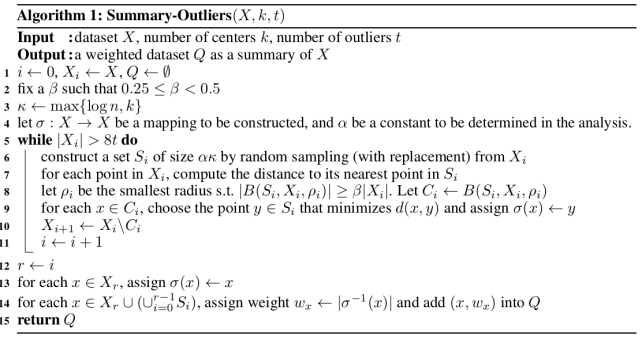
算法1输入数据集X,聚类中心个数k,离群点个数t,得到与X(x1,x2,…,xn)相关的权重数据集Q((x1,w1),(x2,w2),…,(xm,wm))...其中m<n
首先,定义三个常数alpha,beta,kappa.当剩下的数据集Xi的个数大于8t的时候,继续下述循环:
6从数据集Xi中随机选取alpha*kappa个元素,构成一个新的数据集Si(选出的元素放回数据集Xi中),
7对于Xi中的每个元素,计算它与Si的距离(Xi中的一个元素与Si中所有元素计算距离,其中最短的即为这个元素与Si的距离)
8选取一个最小半径,使得Xi中距离Si小于半径的元素个数恰好不小于beta*|Xi|,这些元素整合称为集合Ci.其中|Xi|为数据集Xi中的元素个数
9显然,对于集合Ci中的任一元素x,都可以在Si中找到一点y与其最近,我们得到一个最近映射theta(x)=y
10数据集Xi扣除已经找到最近映射的元素集合Ci,剩下的数据集Xi+1考虑新一轮迭代
循环直到不满足循环条件|Xi|>8t,剩下的数据集标记为Xr,Xr中的元素也给一个自映射作为最近映射theta(x)=x
这时,初始数据集X中的每个元素都有最近映射,而Xr和Si中的元素都有被最近映射,w为被最近映射的次数.考虑Xr和Si中的每个元素x和其被映射次数w,则可以得到权重数据集Q.
这么说可能难懂,举个栗子..有X0个人随机分布在空间中固定不动,第一天,一个外星人路过,随机选取了S0个人,给这些选中的孩子每人一个装置,这个装置能将一定范围内的人救上飞船,由于飞船载重有限,确定最小的范围使得救的人最多且不超重.这样,就救了C0个人,剩下X1=X0/C0个人等待救援..第二天第三天第n天,外星人路过做了同样的事情.到最后一天,剩下等待救援的人不足8t个了,外星人给剩下的每个人一个装置.全员获救故事结束.最后我们要得到的Q就是每个获得装置的人和他们的救人数目(这个数目至少为1,至少救了自己).而救人数为1的就是所谓的离群点.
考虑到离群点数目远远大于聚类中心数目的情况,文章对算法1扩充成算法2,先经过算法1,得到了数据集Xr和S,这时Xr的个数远大于S,从C1UC2U…UCr中随机选取|Xr|-|S|个元素构成数据集S’,重新计算C1UC2U…UCr-1中元素到SUS’的最近距离,得到新的最近映射π(x)=y,x∈C1UC2U…UCr-1,y∈SUS’.这样Q中的元素组就从原来的|Xr|+|S|变成|Xr|+|S|+|S’|=2|Xr|.聚类中心的数目和离群点的数目就相同了(实际上S中也存在w=1的元素,离群点数目应该会比聚类中心多一丁点).

算法3是总算法,对于一个超大数据集X,将其随机划分成s个小块,每个小块的数据集为Ai,对于每一个小块运行算法1,其中初始数据集为Ai,聚类中心数目k,离群点数目2t/s,得到其加权数据集Qi.之后整合所有的加权数据集即为Q,运用现成的(k,t)-median算法即可得到聚类结果(文中使用的是k-means--).
理论证明:
首先,文章定义了加权数据集的损失函数:
也可以以概率(1-1/n^2)写为
文中证明了损失函数的上界和极高概率的下界,再说明其大概率收敛.文中的证明很详细,就不贴图啰嗦了..
实验说明:
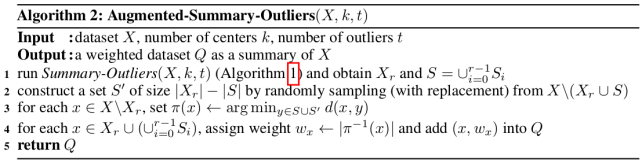
总共在四个数据集上进行实验.1.gauss-δ;2.kddFull;3.kddSp;4.susy-delta
gauss-δ是合成数据集,数据按高斯分布随机采样获得,总共100个聚类中心和1M个点.kddSp是从kddFull中过滤选取的,至于kddFull和susy-delta分别在http://kdd.ics.uci.edu/databases/kddcup99/kddcup99.html和https://archive.ics.uci.edu/ml/datasets/SUSY中有详细的解释.
本文的方法称为ball-grow,第一阶段取alpha=2,β=4.5用算法3计算.与rand,k-means++,k-means||进行对比.第二阶段统一采用k-means--.
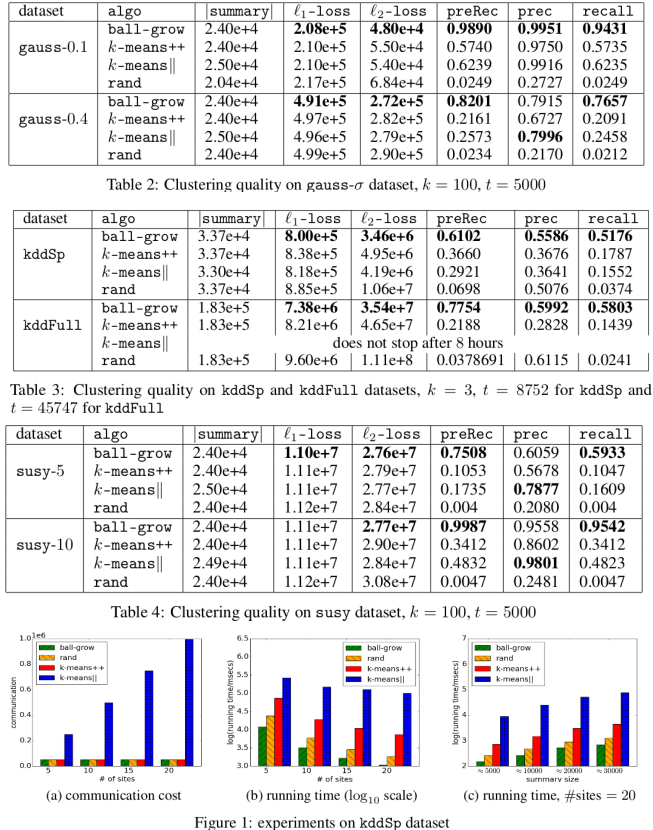
从实验结果可以看出,在给出的数据集上,本文提出的方法传递信息(加权数据集)规模小,损失小,精度\回归高.相较于k-means++,k-mean||和rand这三种方法,ball-grow具有碾压级别的优势.
[1]R. R. Mettu and C. G. Plaxton. Optimal time bounds for approximate clustering. In UAI, pages 344–351, 2002
[2]S. Chawla and A. Gionis. k-means-: A unified approach to clustering and outlier detection. In SDM, pages 189–197, 2013.
【论文阅读】A practical algorithm for distributed clustering and outlier detection的更多相关文章
- 【CV论文阅读】Unsupervised deep embedding for clustering analysis
Unsupervised deep embedding for clustering analysis 偶然发现这篇发在ICML2016的论文,它主要的关注点在于unsupervised deep e ...
- 论文阅读(Xiang Bai——【arXiv2016】Scene Text Detection via Holistic, Multi-Channel Prediction)
Xiang Bai--[arXiv2016]Scene Text Detection via Holistic, Multi-Channel Prediction 目录 作者和相关链接 方法概括 创新 ...
- 论文阅读 | RefineDet:Single-Shot Refinement Neural Network for Object Detection
论文链接:https://arxiv.org/abs/1711.06897 代码链接:https://github.com/sfzhang15/RefineDet 摘要 RefineDet是CVPR ...
- 【CV论文阅读】:Rich feature hierarchies for accurate object detection and semantic segmentation
R-CNN总结 不总结就没有积累 R-CNN的全称是 Regions with CNN features.它的主要基础是经典的AlexNet,使用AlexNet来提取每个region特征,而不再是传统 ...
- 三维目标检测论文阅读:Deep Continuous Fusion for Multi-Sensor 3D Object Detection
题目:Deep Continuous Fusion for Multi-Sensor 3D Object Detection 来自:Uber: Ming Liang Note: 没有代码,主要看思想吧 ...
- 论文阅读:EGNet: Edge Guidance Network for Salient Object Detection
论文地址:http://openaccess.thecvf.com/content_ICCV_2019/papers/Zhao_EGNet_Edge_Guidance_Network_for_Sali ...
- 论文阅读笔记六十三:DeNet: Scalable Real-time Object Detection with Directed Sparse Sampling(CVPR2017)
论文原址:https://arxiv.org/abs/1703.10295 github:https://github.com/lachlants/denet 摘要 本文重新定义了目标检测,将其定义为 ...
- 论文阅读笔记五十七:FCOS: Fully Convolutional One-Stage Object Detection(CVPR2019)
论文原址:https://arxiv.org/abs/1904.01355 github: tinyurl.com/FCOSv1 摘要 本文提出了一个基于全卷积的单阶段检测网络,类似于语义分割,针对每 ...
- 论文阅读(Xiang Bai——【CVPR2016】Multi-Oriented Text Detection with Fully Convolutional Networks)
Xiang Bai--[CVPR2016]Multi-Oriented Text Detection with Fully Convolutional Networks 目录 作者和相关链接 方法概括 ...
随机推荐
- 【Java】遍历List/Set/Map集合的一些常用方法
/* * 遍历List/Set/Map集合的一些常用方法 */import java.util.ArrayList;import java.util.HashMap;import java.util. ...
- spring整合mybatisplus2.x详解
一丶Mp的配置文件 <?xml version="1.0" encoding="UTF-8"?> <beans xmlns="htt ...
- vim配置(vimplus)教程及问题
An automatic configuration program for vim 安装(github地址:https://github.com/chxuan/vimplus.git, 欢迎star ...
- mysql 主从同步(转)
教程开始:一.安装MySQL 说明:在两台MySQL服务器192.168.21.169和192.168.21.168上分别进行如下操作,安装MySQL 5.5.22 二.配置MySQL主服务器(19 ...
- python uiautomator,比 appium 更简单的 app 测试工具
1,场景 在 app 测试的蛮荒时代,如果要进行 app 自动化测试非常麻烦.张大胖如果想做安卓自动化测试,首先必须要学 Java.因为安卓自动化测试都绕不开 google 自己研发的自动化测试框架, ...
- 命令行代理神器 proxychains
因为某些原因,我们需要在命令行下载一些国外的资源,这个时候如果使用 wget,curl,或者 aria2c 的时候,往往又没有速度.这个时候我们需要使用代理来进行加速. 我本地搭的有 ss,但 ss ...
- [考试反思]0727NOIP模拟测试9
啊哈?水到一个rk1? 谢谢诸位大佬放水让我这种人体验到了rk1的滋味. 怪怪的滋味.不太像我的水平. 其实这次考试心态已经佛了,刚意识到前6次考试累计的挺高的分数被清空了,7,8两场又爆炸了... ...
- CSPS模拟 89
- Asp.net Core 系列之--3.领域、仓储、服务简单实现
ChuanGoing 2019-11-11 距离上篇近两个月时间,一方面时因为其他事情耽搁,另一方面也是之前准备不足,关于领域驱动有几个地方没有想通透,也就没有继续码字.目前网络包括园子里大多领域驱 ...
- 【ObjectC—浅copy和深copy】
一.OC设计copy的目的 为了能够从源对象copy一个新的对象副本,改变新对象(副本)的时候,不会影响到原来的对象. 二.实现copy协议 OC提供了两种copy方法:copy和mutableCop ...