GNSS学习笔记--坐标转换
GNSS 坐标转换
GNSS计算主要涉及三个坐标系,地心地固坐标系,地理坐标系和站心坐标系。这里主要介绍一下三个坐标的含义和转换公式。
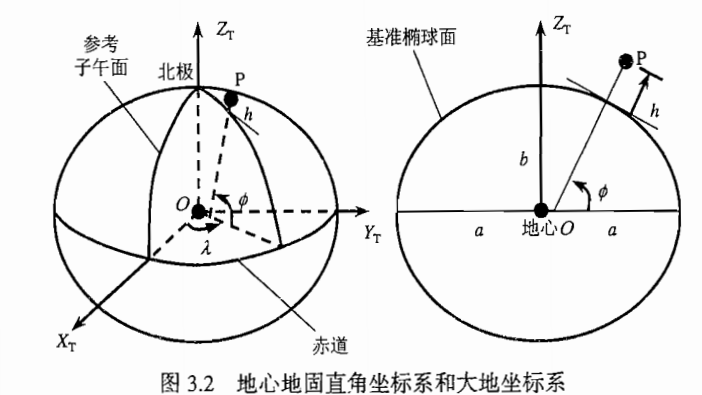
地心地固坐标系如图X,Y,Z表示 (ECEF坐标系),以地心O为坐标原点,Z轴指向协议地球北极,X轴指向参考子午面与地球赤道的交点,也叫地球坐标系。一般GNSS坐标计算都在地心地固坐标系下进行的。由于地球是椭圆形,有WGS-84和CGC2000等多种标准
地理坐标系则通过经度(longitude),纬度(latitude)和高度(altitude)来表示地球的位置,也叫经纬高坐标系(LLA坐标系)。
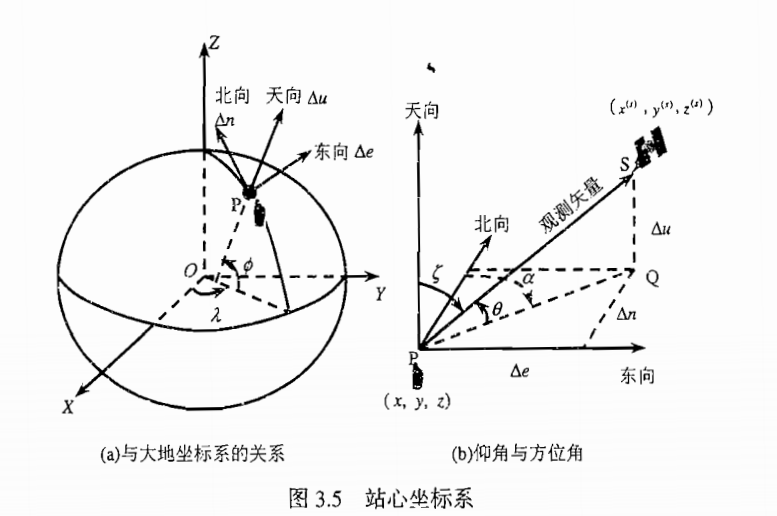
站心坐标系以用户所在位置P为坐标原点,三个轴分别指向东向,北向和天向,也叫东北天坐标系(enu坐标系)。站心坐标系的天向方向和地理坐标系的高度方向是一致的。站心坐标系用在惯性导航和卫星俯仰角计算中较多。
| 参数 | WGS-84 | CGC200 |
|---|---|---|
| 基准椭球体的长半径a | 6378137.0 m | 6378137.0 m |
| 基准椭球体的极扁率f | 1/298.257223565 | 1/298.257223563 |
| 地球自转角速度We | 7.2921151467*1e-5 | 7.2921151467*1e-5 |
| 地球引力和地球质量的乘积GM | 3986004.418*1e8 | 3986004.418*1e8 |
| 光速 | 2.99792458*1e8 m/s | 2.99792458*1e8 m/s |
LLA坐标系转ECEF坐标系
LLA坐标系下的(lon,lat,alt)转换为ECEF坐标系下点(X,Y,Z)
\[\begin{cases}
X=(N+alt)cos(lat)cos(lon)\\
Y=(N+alt)cos(lat)sin(lon)\\
Z=(N(1-e^2)+alt)sin(lat)
\end{cases}\]
其中e为椭球偏心率,N为基准椭球体的曲率半径
\[\begin{cases}
e^2=\frac{a^2-b^2}{a^2}\\
N=\frac{a}{\sqrt{1-e^2sin^2lat}}
\end{cases}\]
由于WGS-84下极扁率\(f=\frac{a-b}{a}\),偏心率e和极扁率f之间的关系:
\[e^2=f(2-f)\]
坐标转换公式也可以为
\[\begin{cases}
X=(N+alt)cos(lat)cos(lon)\\
Y=(N+alt)cos(lat)sin(lon)\\
Z=(N(1-f)^2+alt)sin(lat)
\end{cases}\]
\[N=\frac{a}{\sqrt{1-f(2-f)sin^2lat}}\]
ECEF坐标系转LLA坐标系
ECEF坐标系下点(X,Y,Z)转换为LLA坐标系下的(lon,lat,alt)
\[lon=arctan(\frac{y}{x})\]
\[alt=\frac{p}{cos(lat)-N}\]
\[lat=arctan\bigg[\frac{z}{p}\bigg(1-e^2\frac{N}{N+alt}\bigg)^{-1}\bigg]\]
\[p=\sqrt{x^2+y^2}\]
一开始lon是未知的,可以假设为0,经过几次迭代之后就能收敛
ECEF坐标系转enu坐标系
用户所在坐标点\(P_0=(x_0,y_0,z_0)\),,计算点\(P=(x,y,z)\)在以点\(P_{0}\)为坐标原点的enu坐标系位置\((e,n,u)\)这里需要用到LLA坐标系的数据,\(P_0\)的LLA坐标点为\(LLA_0=(lon_0,lat_0,alt_0)\)
\[
\begin{gathered}
\left[ \begin{array}{ccc}
\Delta{x}\\\Delta{y}\\\Delta{z}
\end{array}
\right]=
\left[ \begin{array}{ccc}
x\\y\\z\end{array}\right]-
\left[ \begin{array}{ccc}
x_0\\y_0\\z_0\end{array}\right]
\end{gathered}
\]
\[
\begin{gathered}
\left[ \begin{array}{ccc}
e\\n\\u
\end{array}
\right]=S\cdot
\left[ \begin{array}{ccc}
\Delta{x}\\\Delta{y}\\\Delta{z}
\end{array}
\right]
\end{gathered}=
\left[ \begin{array}{ccc}
-sin(lon_0) & cos(lon_0) & 0 \\
-sin(lat_0)cos(lon_0) & -sin(lat_0)sin(lon_0) & cos(lat_0) \\
cos(lat_0)cos(lon_0) & cos(lat_0)sin(lon_0) & sin(lat_0)
\end{array} \right]\cdot
\left[ \begin{array}{ccc}
\Delta{x}\\\Delta{y}\\\Delta{z}
\end{array}
\right]
\]
即坐标变换矩阵\(S=\left[ \begin{array}{ccc} -sin(lon_0) & cos(lon_0) & 0 \\ -sin(lat_0)cos(lon_0) & -sin(lat_0)sin(lon_0) & cos(lat_0) \\ cos(lat_0)cos(lon_0) & cos(lat_0)sin(lon_0) & sin(lat_0) \end{array} \right]\)
enu坐标系转ECEF坐标系
\(S\)为单位正交矩阵
\[\mathbf{S}^{-1}=\mathbf{S}^\mathrm{T}\]
反之
\[
\begin{gathered}
\left[ \begin{array}{ccc}
\Delta{x}\\\Delta{y}\\\Delta{z}\end{array}
\right]=S^{-1}\cdot\left[ \begin{array}{ccc}
e\\n\\u\end{array} \right]=
\mathbf{S}^\mathrm{T}\cdot\left[ \begin{array}{ccc}
e\\n\\u\end{array} \right]
\end{gathered}
\]
LLA坐标系转enu坐标系
上述可以看到,从LLA坐标系转换到enu坐标系有较多计算量,在考虑地球偏心率\(e\)很小的前提下,可以做一定的近似公式计算
\[
\left[ \begin{array}{ccc}
\Delta e\\ \Delta n \\ \Delta u
\end{array}
\right]=
\left[\begin{array}{ccc}
a\cdot cos(lat)\cdot \Delta lon & 0 & 0 \\
0 & a \cdot \Delta lat & 0 \\
0 & 0 & \Delta alt
\end{array}
\right]
\]
GNSS学习笔记--坐标转换的更多相关文章
- ArcGIS案例学习笔记-中国2000坐标转换实例
ArcGIS案例学习笔记-中国2000坐标转换实例 联系方式:谢老师,135-4855-4328,xiexiaokui#qq.com 目的:西安1980.中国2000.WGS84(GPS)等任意坐标系 ...
- opencv学习笔记(三)基本数据类型
opencv学习笔记(三)基本数据类型 类:DataType 将C++数据类型转换为对应的opencv数据类型 OpenCV原始数据类型的特征模版.OpenCV的原始数据类型包括unsigned ch ...
- 【Stage3D学习笔记续】山寨Starling(八):核心优化(批处理)的实现
批处理是使GPU进行高效绘制的一种技术手段,也是整个渲染流程中最核心的技术,到目前为止我们并没有使用到这种技术手段,下面我们看看我们现在的渲染机制. 先想一想我们最开始是怎么向GPU绘制一幅图像的,可 ...
- 【Visual C++】游戏编程学习笔记之八:鼠标输入消息(小demo)
本系列文章由@二货梦想家张程 所写,转载请注明出处. 作者:ZeeCoder 微博链接:http://weibo.com/zc463717263 我的邮箱:michealfloyd@126.c ...
- ArcGIS案例学习笔记1_1
ArcGIS案例学习笔记1_1 联系方式:谢老师,135_4855_4328, xiexiaokui#qq.com 时间:第一天上午 准备 0.U盘复制ArcGIS培训*** 1.练习数据不要放到桌面 ...
- 孙鑫视频VC++深入详解学习笔记
孙鑫视频VC++深入详解学习笔记 VC++深入详解学习笔记 Lesson1: Windows程序运行原理及程序编写流程 Lesson2: 掌握C++基本语法 Lesson3: MFC框架程序剖析 Le ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十九章:法线贴图
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十九章:法线贴图 学习目标 理解为什么需要法线贴图: 学习法线贴图如 ...
- OpenLayers 6 学习笔记
这个是真的学习笔记!不是教程 转载请声明:https://www.cnblogs.com/onsummer/p/12159366.html 基于openlayers 6.x api不太好查,就基于腾讯 ...
- Tensorflow学习笔记No.11
图像定位 图像定位是指在图像中将我们需要识别的部分使用定位框进行定位标记,本次主要讲述如何使用tensorflow2.0实现简单的图像定位任务. 我所使用的定位方法是训练神经网络使它输出定位框的四个顶 ...
随机推荐
- 如何获取Html的height和width属性(网页宽、高)
1.页面如图所示 2.Html代码 <div style="color:green;" id="html_info"></div> 3. ...
- web测试点集合
转自:https://blog.csdn.net/yuki_ying/article/details/54946541 web测试点一 .界面检查 进入一个页面测试,首先是检查title,页面排版,字 ...
- GUI程序分析实例
GUI程序开发概述 GUI程序开发原理 GetMessage(&msg)将消息队列中的消息取出来,在循环中进行处理. GUI程序开发的本质
- pytorch 中改变tensor维度的几种操作
具体示例如下,注意观察维度的变化 #coding=utf-8 import torch """改变tensor的形状的四种不同变化形式""" ...
- 【Springboot】spring-boot-starter-redis包报错 :unknown
springboot集成redis时,引入spring-boot-starter-redis包报错,maven找不到这个资源.如下图: 我的项目中,spring boot是 用的2.0.4版本.spr ...
- oracle将时间加一天,加小时,加分,加秒
前言 oracle 时间类型可以直接相加,但加的是天,以天为单位,我们了解了这个,加一天,一小时,一分,一秒就都简单了. 加一天 select to_date('2019-08-15 22:03:10 ...
- 这几个 Chrome 的 Tab 增强插件你都用上了吗?
1.OneTab:将无数 Tab 合并在一个页面 很多时候我们在一个窗口打开太多的tab,每一个tab太小不容易管理,这时候使用OneTab能够把所有tab收起放在一个页面,点击就可打开该tab,非常 ...
- SSH框架之Struts2第三篇
1.3相关知识点 : 1.3.1 OGNL的表达式 : 1.3.1.1 什么是OGNL OGNL是Object-Graph Navigation Language的编写,它是一种功能强大的表达式语言, ...
- react-native 键盘遮挡输入框
Android上已经自动对键盘遮挡输入框做了处理,所以我们只需要关注ios. 1.首先引入 KeyboardAvoidingView import { KeyboardAvoidingView } f ...
- Django_xadmin_TypeError: Related Field got invalid lookup: icontains
问题: 当我在给某一张表加上外键搜索的时候,会出现 TypeError: Related Field got invalid lookup: icontains 问题原因: a 表关联 b表,也就是说 ...