halcon 入门教程(三) 边缘检测
原文作者:aircraft
原文链接:halcon 入门教程(三) 边缘检测 
有兴趣可以多看其他的halcon教程
本篇讲一下边缘检测(边缘提取),因为这个我发现也是比较常用的,放在入门教程(三)会比较好,在入门教程(一)(二)学完了形态学,和Blob分析,再来学边缘检测并且结合案例感觉会掌握学习的很快。跟openCV一样主流的还是那几个检测算子Sobel、Canny、Laplacian等等。
一.边缘检测简介
1. 边缘检测的基本原理
边缘是图像中灰度、颜色或纹理发生显著变化的区域,通常对应物体的边界。边缘检测的目标是定位这些变化的区域,方法可分为:
- 基于梯度:通过计算像素的梯度幅值和方向(如Sobel、Canny)。
- 基于二阶导数:利用拉普拉斯算子检测过零点(如Laplacian)。
- 基于模板匹配:使用预定义的边缘模板进行卷积。
2. Halcon边缘检测的核心算法
**(1) 一阶梯度法(Sobel, Prewitt)**
- 原理:通过卷积核计算像素在水*和垂直方向的梯度(Gx和Gy),合成梯度幅值和方向。
halcon示例:
sobel_amp(Image, EdgeAmplitude, 'sum_abs', 3) // Sobel算子,3x3卷积核
edges_image(Image, ImaAmp, ImaDir, 'canny', 1, 'nms') // 综合梯度计算
(2) Canny边缘检测**
- 步骤:
- 高斯滤波:去噪。
- 梯度计算:类似Sobel。
- 非极大值抑制(NMS):保留梯度方向上的局部最大值,细化边缘。
- 滞后阈值:使用高低阈值(
LowThreshold,HighThreshold)连接边缘。
halcon示例:
edges_sub_pix(Image, Edges, 'canny', 1.5, 20, 40) // Canny算法,亚像素精度
(3) 亚像素边缘检测**
- 原理:在像素级边缘检测的基础上,通过插值或梯度模型拟合(如高斯函数、多项式)将精度提升到亚像素级别(精度可达0.1像素)。
halcon 示例:
edges_sub_pix(Image, Edges, 'canny', 1.5, 20, 40) // 直接输出亚像素边缘轮廓
3. Halcon边缘检测的关键技术
**(1) 高斯滤波与尺度控制**
- 作用:通过调节高斯滤波的
Sigma参数控制边缘检测的灵敏度。示例:- 大Sigma:检测粗边缘,抗噪能力强。
- 小Sigma:检测细边缘,但易受噪声干扰。
edges_sub_pix(Image, Edges, 'canny', Sigma, LowThresh, HighThresh)
(2) 非极大值抑制(NMS)**
- 作用:在梯度方向上仅保留局部最大值的像素,消除边缘的“宽线”现象。
- Halcon参数:
edges_image(Image, ImaAmp, ImaDir, 'canny', 1, 'nms') // 使用NMS
(3) 滞后阈值(双阈值)**
- 原理:参数示例:
- 高阈值:强边缘必须超过此值。
- 低阈值:弱边缘若与强边缘连接则保留。
edges_sub_pix(Image, Edges, 'canny', 1.5, 20, 40) // Low=20, High=40
4. Halcon边缘检测的优势
- 亚像素精度:通过模型拟合实现超像素级边缘定位,适合高精度测量。
- 灵活性:支持多种算法(Canny、Sobel、Lanser等)和参数调节。
- 抗噪能力:高斯滤波和滞后阈值有效抑制噪声。
- 实时性:高度优化的算法实现,适用于工业实时检测。
5. 总结
Halcon的边缘检测通过梯度计算、非极大值抑制、双阈值分割和亚像素优化,实现了高精度和强鲁棒性的边缘提取。其核心在于*衡噪声抑制与细节保留,广泛应用于工业检测、自动驾驶、医学成像等领域。实际使用时需根据场景特点调整算法参数,并结合形态学操作(如膨胀、填充)优化结果。
二.算子与案例学习
这里正常我是想让大家先学习相关的算子函数的,但是因为我自己也学习过,我们学习的心态都是不见兔子不撒鹰,没有看到一些效果之前,我们都难以产生比较大的学习热情,所以这里先上一个车道线提取的案例学习,注释都会详细打清楚。在大一上学期的时候自己买了本单片机来学,发现学的太枯燥了,后来就放弃的硬件的路,后面偶然得到了个c语言的学习视频,然后跟着视频学,大一就把c语言c++,MFC那些东西都自学完了。对于初学的人没有能直观看到效果的学习,都是没有太大兴趣的。书本和文字冷冰冰的,怎么让初学者去学!!!
1.案例:车道线检测(autobahn.hdev)
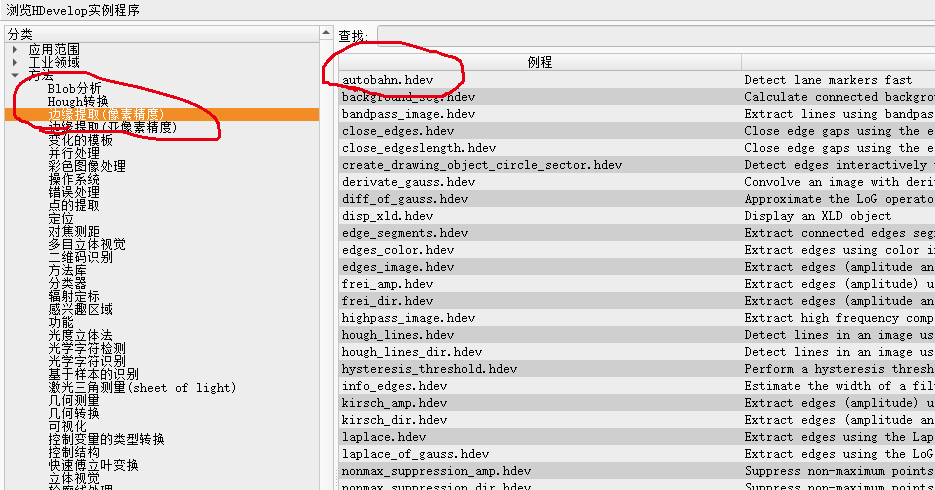
老规矩,先上图,我们的目的是把一定距离内的车道的车道线给提取出来

实例代码:autobahn.hdev
* autobahn.hdev: Fast detection of lane markers
*
dev_update_window ('off')
* 关闭窗口自动更新,避免频繁刷新提升执行速度
dev_close_window ()
* 关闭所有已打开的图形窗口
dev_open_window (0, 0, 768, 575, 'black', WindowID)
* 打开新窗口,位置(0,0),尺寸768x575,背景黑色
MinSize := 30
* 定义形态学膨胀的核大小(30x30矩形)
get_system ('init_new_image', Information)
* 获取系统默认的'init_new_image'参数值
set_system ('init_new_image', 'false')
* 禁止系统自动初始化新图像,避免覆盖已有图像 * 生成网格区域,用于限制后续处理的ROI(感兴趣区域) 注意这里只是提取宽度为30像素的网格线区域出来
gen_grid_region (Grid, MinSize, MinSize, 'lines', 512, 512)
* 参数说明:
* Grid : 输出网格区域
* MinSize : 网格线间距(水*和垂直均为30像素)
* 'lines' : 生成线型网格(非矩形块)
* 512, 512 : 网格覆盖的原始图像尺寸(此处可能与实际图像尺寸不一致,后续通过裁剪修正) * 裁剪网格区域,仅保留道路部分(坐标范围:行130~450,列10~502)
clip_region (Grid, StreetGrid, 130, 10, 450, 502) dev_set_line_width (3)
* 设置显示线宽为3(用于网格和边缘的高亮显示)
dev_set_color ('green')
* 设置显示颜色为绿色(用于网格)
read_image (ActualImage, 'autobahn/scene_00')
* 读取第一帧图像(scene_00)
dev_display (ActualImage)
* 显示图像
stop ()
* 暂停程序,等待用户按F5继续
dev_display (StreetGrid)
* 在图像上叠加显示裁剪后的网格区域(绿色)
stop ()
* 再次暂停 for i := 0 to 28 by 1
* 读取当前帧图像(例如:scene_00, scene_01,..., scene_28)
read_image (ActualImage, 'autobahn/scene_' + (i$'02'))
* i$'02'表示两位数字补零 * 将处理区域限制到StreetGrid网格内
reduce_domain (ActualImage, StreetGrid, Mask)
* 作用:生成一个掩膜图像Mask,仅保留StreetGrid区域内的像素 * Sobel边缘检测(梯度幅值计算)
sobel_amp (Mask, Gradient, 'sum_abs', 3)
* 参数说明:
* 'sum_abs' : 梯度计算方法(水*与垂直方向绝对值之和)
* 3 : Sobel算子尺寸(3x3核) * 初次阈值分割提取边缘点 Gradient这个是得到的梯度图,只有在边缘区域(也就是道路和道路线交汇的区域)才会有较高的灰度值存在
threshold (Gradient, Points, 20, 255)
* 提取梯度值在[20, 255]之间的区域(初步筛选车道线边缘) * 形态学膨胀(连接离散边缘点)
dilation_rectangle1 (Points, RegionDilation, MinSize, MinSize)
* 使用30x30矩形核对边缘点进行膨胀,连接相邻点形成连续区域 * 限制处理区域到膨胀后的区域
reduce_domain (ActualImage, RegionDilation, StripGray)
* StripGray为仅包含RegionDilation区域的灰度图像 * 高亮度区域提取(车道线通常为白色/黄色)
threshold (StripGray, Strip, 190, 255)
* 提取灰度值在[190, 255]之间的区域(高亮度车道线) * 填充区域内的孔洞
fill_up (Strip, RegionFillUp)
* 确保车道线区域连续无断裂 * 显示处理结果
dev_display (ActualImage)
* 显示原始图像
dev_display (RegionFillUp)
* 叠加显示检测到的车道线区域(默认颜色)
endfor dev_set_line_width (1)
* 恢复默认线宽为1
dev_update_window ('on')
* 重新启用窗口自动更新
set_system ('init_new_image', Information)
* 恢复系统参数'init_new_image'的默认值
关键步骤总结
- ROI限制:通过网格裁剪 (
clip_region) 和域缩减 (reduce_domain) 聚焦道路区域,减少计算量。 - 边缘检测:Sobel算子提取梯度,阈值分割初步筛选边缘点。
- 形态学处理:膨胀操作连接离散点,填充操作确保车道线连续。
- 亮度阈值:假设车道线高亮,通过二次阈值分割精确定位。
效果图:

第一个案例有我的注释在理解起来应该还是比较简单的,也发现了里面开始运用到了一些边缘检测的算子,接下来我们就学习一下几个常用的边缘检测的算子。
1.sobel算子sobel_amp(Image : EdgeAmplitude : FilterType, Size : )详解:
函数原型:
sobel_amp(Image : EdgeAmplitude : FilterType, Size : )
- 功能:通过 Sobel 算子计算图像的梯度幅值,用于边缘检测。
- 输入/输出:
Image:输入图像(单通道灰度图像)。EdgeAmplitude:输出图像,表示梯度幅值(边缘强度)。FilterType:梯度计算方法(如 'sum_abs')。Size:Sobel 核的大小(3, 5, 7, 9, 11 等奇数)。
1. **FilterType参数(梯度计算方式)**
控制梯度幅值的计算方法,常见选项如下:
**
'sum_abs'**(默认):- 计算水*和垂直方向梯度的绝对值之和:

- 计算速度快,适用于实时性要求高的场景。
- 计算水*和垂直方向梯度的绝对值之和:
**
'thin_sum_abs'**:- 类似
'sum_abs',但使用更小的卷积核(仅适用于Size=3)。
- 类似
**
'x'** 或 **'y'**:- 仅计算水*方向(
'x')或垂直方向('y')的梯度。
- 仅计算水*方向(
**
'frei_chen'**:- 使用 Frei-Chen 算子,增强对角边缘的响应。
- 适用于复杂纹理或对角边缘检测。
**
'sobel'**:
- 计算欧几里得距离(*方和开根号):
- 计算欧几里得距离(*方和开根号):
- 更接*理论梯度,但计算量较大。
2. **Size(卷积核大小)**
- 取值范围:3, 5, 7, 9, 11 等奇数。
- 影响:
- 小尺寸(如 3):检测细边缘,但对噪声敏感。
- 大尺寸(如 5):检测粗边缘,抗噪能力强,但可能丢失细节。
- 典型选择:
- 大多数场景:
Size=3。 - 高噪声图像:
Size=5或7。
- 大多数场景:
使用示例
示例 1:基本边缘检测
read_image(Image, 'part.png')
sobel_amp(Image, EdgeAmplitude, 'sum_abs', 3)
threshold(EdgeAmplitude, Edges, 20, 255) // 阈值分割提取边缘
应用场景
工业检测:
- 检测零件轮廓、缺陷边缘。
- 参数建议:
FilterType='sum_abs',Size=3。
车道线检测(如 autobahn.hdev):
- 提取车道线边缘,需*衡噪声抑制和边缘连续性。
- 参数建议:
FilterType='sum_abs',Size=3。
医学图像处理:
- 检测组织边界或血管。
- 参数建议:
FilterType='frei_chen',Size=5(增强复杂边缘)。
参数选择建议
| 场景需求 | 推荐参数 |
|---|---|
| 实时性要求高 | FilterType='sum_abs', Size=3 |
| 高精度边缘定位 | FilterType='sobel', Size=3 |
| 抗噪需求强 | Size=5 或 7 |
| 检测对角边缘 | FilterType='frei_chen' |
与其他算子的对比
| 算子 | 特点 | 适用场景 |
|---|---|---|
sobel_amp |
灵活调节核大小,多种梯度计算方式 | 通用边缘检测 |
edges_image |
集成非极大值抑制(NMS)和亚像素精度 | 高精度边缘(如测量) |
canny |
双阈值和NMS,抗噪能力强但计算量大 | 复杂背景下的弱边缘检测 |
2.亚像素精度边缘提取算子(常用)edges_sub_pix(Image : Edges : Filter, Alpha, Low, High : )详解:
函数原型:
edges_sub_pix(Image : Edges : Filter, Alpha, Low, High : )
- 功能:亚像素级精度的边缘检测,输出连续的边缘轮廓(XLD格式)。
- 输入/输出:
Image:输入图像(单通道灰度图像)。Edges:输出的亚像素边缘轮廓(XLD对象)。Filter:边缘检测滤波器类型(如 'canny', 'lanser2', 'deriche1')。Alpha:滤波器的*滑参数(控制边缘锐度与抗噪性)。Low,High:滞后阈值(用于边缘连接)。
参数详解
1. **Filter(滤波器类型)**
不同滤波器对应不同的边缘检测算法:
**
'canny'**(默认):- 基于高斯导数,支持亚像素精度。
- 适用于通用场景,计算效率高。
- Alpha:高斯滤波器的标准差(推荐值:1.0~3.0)。
**
'lanser2'**:- 使用 Lanser 滤波器,边缘定位更精确。
- 适用于高精度测量,但计算量较大。
- Alpha:*滑参数(推荐值:0.3~0.7)。
**
'deriche1'** 和 **'deriche2'**:- 基于递归滤波器,适合实时处理。
- Alpha:控制*滑程度(值越大,*滑越强)。
2. **Alpha(*滑参数)**
- 作用:*衡边缘锐度与噪声抑制。
- 小Alpha(如 0.5):保留细节,但易受噪声干扰。
- 大Alpha(如 3.0):强*滑,适合高噪声图像。
- 典型值:
'canny':1.0~3.0。'lanser2':0.3~0.7。
3. **Low 和 High(滞后阈值)**
- 作用:经验规则:
High ≈ 2 * Low。- High:边缘强度的最低阈值,高于此值的边缘被保留。
- Low:低于此值的边缘被忽略;介于两者之间的边缘需与高阈值边缘连接。
- 示例:
- 若图像对比度低,设置
Low=10,High=20。 - 若对比度高,设置
Low=30,High=60。
- 若图像对比度低,设置
使用示例
示例 1:Canny 边缘检测
read_image(Image, 'part.png')
edges_sub_pix(Image, Edges, 'canny', 1.5, 25, 50)
dev_display(Edges) * 显示亚像素边缘
示例 2:Lanser 滤波器(高精度)
edges_sub_pix(Image, Edges, 'lanser2', 0.5, 20, 40)
应用场景
工业测量:
- 检测零件边缘,用于尺寸测量。
- 参数建议:
Filter='lanser2',Alpha=0.5,Low=20,High=40。
车道线检测:
- 提取车道线轮廓,结合形态学处理。
- 参数建议:
Filter='canny',Alpha=1.5,Low=15,High=30。
医学图像分析:
- 定位组织或器官边界。
- 参数建议:
Filter='canny',Alpha=2.0,Low=10,High=20。
参数调优策略
| 问题现象 | 解决方案 |
|---|---|
| 边缘断裂 | 降低 Low 或增大 Alpha |
| 噪声过多 | 增大 Alpha 或提高 Low/High |
| 边缘模糊 | 减小 Alpha |
| 漏检弱边缘 | 降低 High 或 Low |
对比其他边缘检测算子
| 算子 | 精度 | 抗噪性 | 速度 | 适用场景 |
|---|---|---|---|---|
edges_sub_pix |
亚像素 | 高 | 中 | 高精度测量 |
sobel_amp |
像素级 | 中 | 快 | 快速边缘检测 |
canny |
像素级 | 高 | 慢 | 复杂背景下的边缘 |
总结
edges_sub_pix 是 Halcon 中实现亚像素边缘检测的核心算子,通过合理选择滤波器类型(Filter)、*滑参数(Alpha)和阈值(Low, High),可在噪声抑制与细节保留之间取得*衡。典型场景包括工业零件测量、车道线识别和医学图像分析。实际应用中需结合后处理操作(如边缘连接和拟合)以提升结果质量。
3.像素精度边缘提取算子edges_image(Image : ImaAmp, ImaDir : Filter, Alpha, NMS, Low, High : )详解:
函数原型:
edges_image(Image : ImaAmp, ImaDir : Filter, Alpha, NMS, Low, High : )
- 功能:执行像素级边缘检测,输出梯度幅值图像(
ImaAmp)和方向图像(ImaDir),支持多种滤波器和非极大值抑制(NMS)。 - 输入/输出:
Image:输入图像(单通道灰度图像)。ImaAmp:输出梯度幅值图像(灰度图,高值对应边缘)。ImaDir:输出梯度方向图像(角度图,范围0~180°)。Filter:边缘检测滤波器类型(如 'canny', 'sobel_fast')。Alpha:滤波器*滑参数。NMS:非极大值抑制模式('none', 'nms', 'thin')。Low,High:滞后阈值(用于边缘连接)。
参数详解
1. **Filter(滤波器类型)**
**
'canny'**:
基于高斯导数的Canny算法,支持亚像素级精度。- Alpha:高斯滤波的标准差(推荐值1.0~3.0)。
- 特点:抗噪能力强,适用于复杂场景。
**
'sobel_fast'**:
优化的Sobel算子,计算速度快。- Alpha:无意义(可设为任意值)。
- 特点:适合实时处理,但精度较低。
**
'lanser2'** 或 **'deriche2'**:
高精度滤波器,适合测量任务。- Alpha:控制*滑强度(参考值0.3~0.7)。
2. **Alpha(*滑参数)**
- 作用:控制滤波器的*滑程度。
- 小Alpha(如0.5):保留细节,适合清晰边缘。
- 大Alpha(如3.0):强*滑,适合高噪声图像。
3. **NMS(非极大值抑制模式)**
- **
'none'**:不进行非极大值抑制,输出宽边缘。 - **
'nms'**:标准非极大值抑制,细化边缘至单像素宽。 - **
'thin'**:优化细化模式,适合高精度测量。
4. **Low 和 High(滞后阈值)**
- 作用:经验规则:
High ≈ 2 * Low。High:边缘强度的最低阈值,高于此值的像素被保留为强边缘。Low:低于此值的像素被忽略;介于两者之间的像素需与强边缘连接。
- 示例:
- 低对比度图像:
Low=10,High=20。 - 高对比度图像:
Low=30,High=60。
- 低对比度图像:
使用示例
示例1:Canny边缘检测(带NMS)
read_image(Image, 'part.png')
edges_image(Image, Amp, Dir, 'canny', 1.5, 'nms', 20, 40)
threshold(Amp, Edges, 1, 255) // 二值化边缘
示例2:Sobel快速检测(无NMS)
edges_image(Image, Amp, Dir, 'sobel_fast', 0, 'none', 10, 20)
应用场景
工业零件检测:
- 参数:
Filter='canny',Alpha=1.5,NMS='nms',Low=20,High=40。 - 效果:高精度定位边缘,用于尺寸测量。
- 参数:
实时视频处理(如车道线检测):
- 参数:
Filter='sobel_fast',NMS='none',Low=15,High=30。 - 特点:牺牲精度换速度,适合嵌入式设备。
- 参数:
医学图像分析(如血管分割):
- 参数:
Filter='lanser2',Alpha=0.5,NMS='thin',Low=10,High=20。 - 效果:增强弱边缘检测能力。
- 参数:
参数调优策略
| 问题现象 | 解决方案 |
|---|---|
| 边缘过宽 | 启用 NMS='nms' 或 NMS='thin' |
| 噪声过多 | 增大 Alpha 或提高 Low/High |
| 弱边缘漏检 | 降低 Low 和 High |
| 计算速度慢 | 改用 Filter='sobel_fast' |
与其他算子的对比
| 算子 | 精度 | 抗噪性 | 输出类型 | 适用场景 |
|---|---|---|---|---|
edges_image |
像素级 | 高 | 梯度幅值+方向 | 通用边缘检测 |
edges_sub_pix |
亚像素 | 高 | XLD轮廓 | 高精度测量 |
sobel_amp |
像素级 | 中 | 梯度幅值 | 快速边缘检测 |
总结
edges_image 是 Halcon 中灵活的边缘检测算子,支持多种滤波器和非极大值抑制模式。其核心优势在于:
- 灵活性:通过
Filter和NMS适配不同场景(速度、精度、抗噪性)。 - 可调性:通过
Alpha和阈值*衡噪声抑制与细节保留。 - 输出丰富:梯度幅值和方向信息可用于后续处理(如边缘跟踪或方向分析)。
典型应用包括工业检测、医学图像处理和实时视频分析。实际使用中需根据具体需求调整参数,并配合阈值分割或形态学操作优化结果。
霍夫变换的基本原理
Halcon 中的霍夫变换(Hough Transform)是一种强大的工具,主要用于从图像中检测几何形状(如直线、圆、椭圆等)
霍夫变换通过将图像空间中的点映射到参数空间(极坐标系),利用投票机制检测几何形状。
对于直线检测,每个边缘点 (x,y) 对应极坐标中的一条正弦曲线:

- r:直线到原点的距离(像素)
- θ:直线与图像x轴的夹角(弧度,范围:-π / 2 ~ π / 2)
关键步骤:
- 参数空间量化:将 θ 和 r 离散化为有限区间。
- 累加器投票:每个边缘点在参数空间中对应的曲线经过的区间投票计数。
- 峰值检测:累加器值超过阈值的区间视为检测到的直线参数。
示例1:基础直线检测
* 读取图像并提取边缘
read_image(Image, 'road.png')
edges_sub_pix(Image, Edges, 'canny', 1.5, 20, 40)
threshold(Edges, RegionEdges, 1, 255) * 霍夫变换检测直线
hough_lines(RegionEdges, 0.02, 50, 0.1, 10, Angle, Dist) * 绘制检测到的直线
gen_region_hline(RegionLines, Angle, Dist)
dev_display(Image)
dev_display(RegionLines)
函数原型:
hough_lines(RegionIn : : AngleResolution, Threshold, AngleGap, DistGap : Angle, Dist)
- 功能:使用霍夫变换(Hough Transform)从二值区域中检测直线,返回直线的角度和距离参数。
- 输入/输出:
- 输入:
RegionIn:输入区域(通常为边缘检测后的二值图像)。
- 参数:
AngleResolution:角度分辨率(控制角度检测精度)。Threshold:累加器阈值(决定直线的最小支持点数)。AngleGap:角度合并阈值(合并相*角度的直线)。DistGap:距离合并阈值(合并相*距离的直线)。
- 输出:
Angle:检测到的直线的角度(弧度制,范围:-π/2 ~ π/2)。Dist:直线到原点的距离(像素单位,基于极坐标公式:r = x*cosθ + y*sinθ)。
- 输入:
参数详解
1. **AngleResolution(角度分辨率)**
- 作用:定义霍夫空间中角度θ的步长(分辨率)。
- 取值范围:通常为
0.01~1.0(弧度)。 - 影响:
- 小值(如
0.01):角度划分精细,检测精度高,但计算量大。 - 大值(如
0.1):角度划分粗糙,计算速度快,可能漏检细节。
- 小值(如
2. **Threshold(累加器阈值)**
- 作用:直线在霍夫空间中的累加器值需超过此阈值才被保留。
- 示例:调优建议:根据图像中边缘点密度调整,避免漏检或噪声干扰。
Threshold=50:直线至少需要50个边缘点支持。
3. **AngleGap(角度合并阈值)**
- 作用:合并角度差小于此值的相邻直线。
- 单位:弧度。
- 示例:
AngleGap=0.05(约2.86°):若两条直线角度差小于0.05弧度,视为同一方向。
4. **DistGap(距离合并阈值)**
- 作用:合并距离差小于此值的相邻直线。
- 单位:像素。
- 示例:
DistGap=10:若两条直线距离差小于10像素,视为同一位置。
示例2:合并相*直线
* 合并角度差<5°、距离差<20像素的直线
AngleGap := radians(5) * 5度转弧度
DistGap := 20
hough_lines(RegionEdges, 0.02, 30, AngleGap, DistGap, Angle, Dist)
车道线检测(如
autobahn.hdev):- 参数建议:
AngleResolution=0.02,Threshold=50,AngleGap=0.1,DistGap=15。 - 说明:合并相*的水*和倾斜车道线。
- 参数建议:
工业零件几何检测:
- 参数建议:
AngleResolution=0.01,Threshold=100,AngleGap=0.05,DistGap=5。 - 说明:高精度检测零件边缘的直线特征。
- 参数建议:
文档表格线提取:
- 参数建议:
AngleResolution=0.05,Threshold=30,AngleGap=0.2,DistGap=10。 - 说明:快速提取水*和垂直线。
- 参数建议:
参数调优策略
| 问题现象 | 解决方案 |
|---|---|
| 检测到过多短线段 | 提高 Threshold,减少噪声影响 |
| 漏检长直线 | 降低 Threshold,增大 AngleGap |
| 直线断裂 | 合并参数(AngleGap和DistGap)设置过小,适当增大 |
| 计算速度慢 | 增大 AngleResolution,降低精度以换取速度 |
关键注意事项
输入区域预处理:
- 输入
RegionIn应为二值化的边缘区域,建议先用edges_sub_pix或sobel_amp提取边缘。
- 输入
极坐标系原点:
- 原点默认为图像左上角(Halcon坐标系),距离
Dist是直线到原点的极坐标距离。
- 原点默认为图像左上角(Halcon坐标系),距离
角度范围:
- 输出角度
Angle范围为-π/2到π/2,对应直线方向(与x轴夹角)。
- 输出角度
与其他直线检测方法的对比
| 方法 | 优点 | 缺点 |
|---|---|---|
hough_lines |
直接输出参数,支持合并相*直线 | 计算量较大,需精细调参 |
fit_line_contour_xld |
基于轮廓拟合,精度高 | 需先提取边缘轮廓,无法合并直线 |
| 深度学习(如HoughNet) | 鲁棒性强,适应复杂场景 | 需要大量训练数据和算力 |
总结
hough_lines 是 Halcon 中基于霍夫变换的经典直线检测算子,通过调节角度分辨率、阈值和合并参数,可适应不同场景的直线检测需求。其核心优势在于直接输出直线的极坐标参数,便于后续几何分析。实际应用中需结合预处理(边缘检测)和后处理(参数合并)以优化结果,适用于工业检测、自动驾驶和文档分析等领域。
OK,接下来在看个案例道路图像的边缘提取edge_segments.hdev:
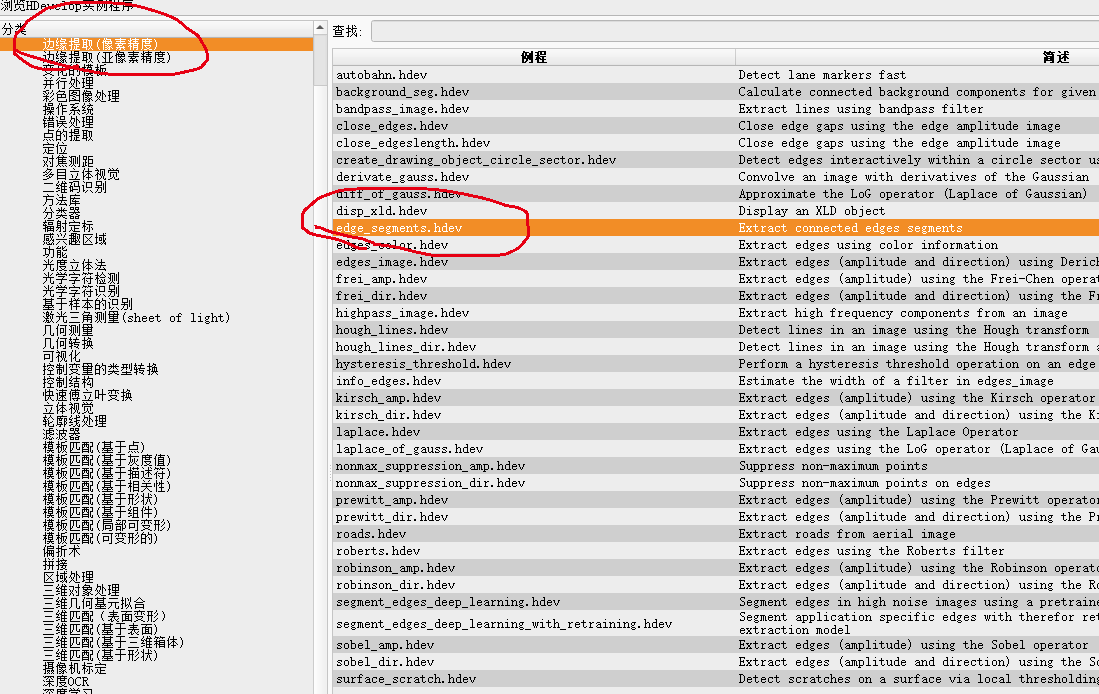
图像:

效果图:

实例代码:
* 关闭窗口自动更新以提升执行速度
dev_update_off () * 关闭所有已打开的图形窗口
dev_close_window () * ****************************
* 步骤1: 读取图像并初始化窗口
* ****************************
* 读取图像文件'mreut'
read_image (Image, 'mreut') * 获取图像尺寸
get_image_size (Image, Width, Height) * 根据图像尺寸自适应打开显示窗口
dev_open_window_fit_image (Image, 0, 0, Width, Height, WindowID) * 设置窗口字体为等宽字体,字号12
set_display_font (WindowID, 12, 'mono', 'true', 'false') * 设置绘图模式为仅绘制区域边界(不填充)
dev_set_draw ('margin') * 设置绘图线宽为3像素
dev_set_line_width (3) * 显示原始图像
dev_display (Image) * 显示继续提示信息(黑底白字)
disp_continue_message (WindowID, 'black', 'true') * 暂停执行,等待用户按键
stop () * ****************************
* 步骤2: 边缘检测与滤波处理
* ****************************
* 使用Lanser2滤波器进行边缘检测
* 参数说明:
* 'lanser2' : 滤波器类型(*衡精度与抗噪性)
* 0.5 : *滑系数(Alpha值)
* 'nms' : 非极大值抑制
* 20, 40 : 滞后阈值(Low=20, High=40)
edges_image (Image, ImaAmp, ImaDir, 'lanser2', 0.5, 'nms', 20, 40) * 显示梯度幅值图像
dev_display (ImaAmp) * 显示继续提示信息
disp_continue_message (WindowID, 'black', 'true') * 暂停执行
stop () * ****************************
* 步骤3: 阈值分割与连通域提取
* ****************************
* 对梯度幅值图像进行阈值分割(保留所有非零像素)
threshold (ImaAmp, Region, 1, 255) * 分割连通域(每个边缘段为一个独立区域)
connection (Region, ConnectedRegions) * 清空窗口并设置彩色显示模式
dev_clear_window ()
dev_set_colored (12) * 显示所有连通域(不同颜色区分)
dev_display (ConnectedRegions) * 显示继续提示信息
disp_continue_message (WindowID, 'black', 'true') * 暂停执行
stop () * ****************************
* 步骤4: 边缘分段处理与XLD生成
* ****************************
* 清空窗口准备显示最终结果
dev_clear_window () * 计算连通域总数
count_obj (ConnectedRegions, Number) * 创建空对象容器存储XLD轮廓
gen_empty_obj (XLDContours) * 遍历所有连通域
for i := 1 to Number by 1
* 选择第i个连通域
select_obj (ConnectedRegions, SingleEdgeObject, i) * 将骨架线分割为独立线段
* 参数说明:
* 2 : 最小线段长度(短于2像素的线段被丢弃)
split_skeleton_lines (SingleEdgeObject, 2, BeginRow, BeginCol, EndRow, EndCol) * 遍历当前连通域分割出的所有线段
for k := 0 to |BeginRow| - 1 by 1
* 根据起点和终点坐标生成XLD线段
gen_contour_polygon_xld (Contour, [BeginRow[k],EndRow[k]], [BeginCol[k],EndCol[k]]) * 将线段添加到容器中
concat_obj (XLDContours, Contour, XLDContours)
endfor
endfor * 显示最终生成的XLD轮廓集合
dev_display (XLDContours)
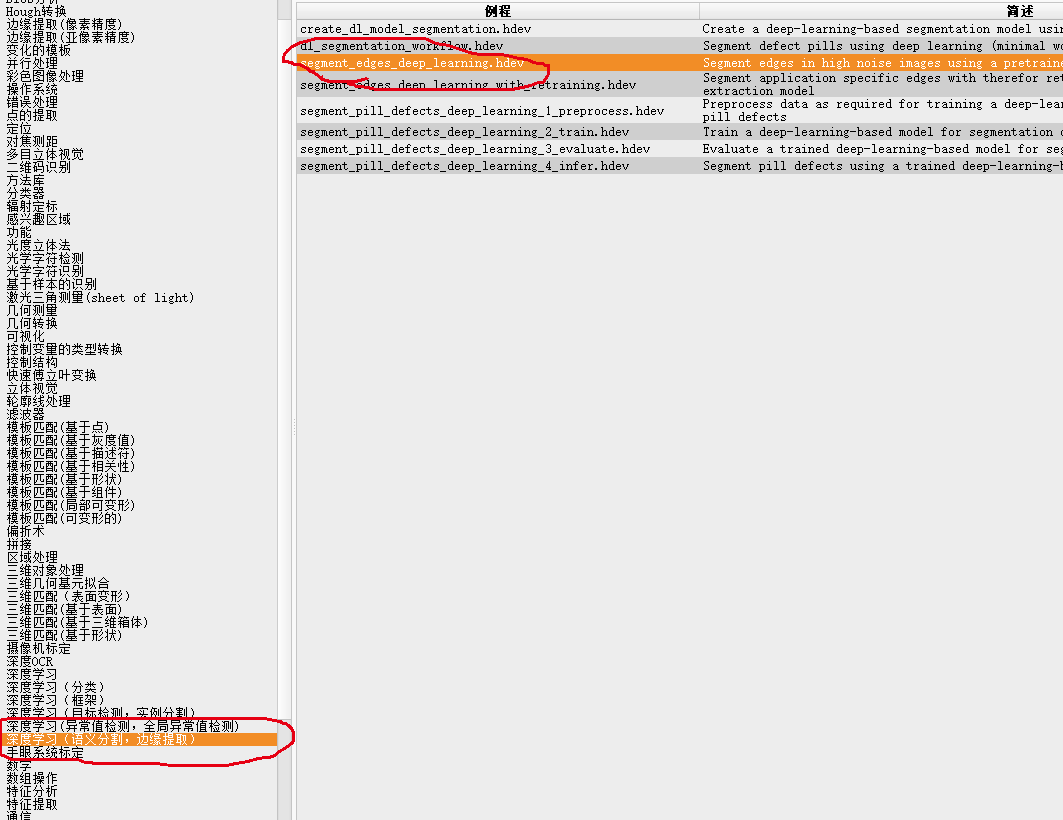
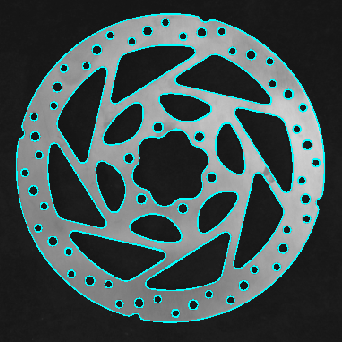
上面传统的主要的边缘提取都在halcon的官方示例里了,有兴趣的话还可以学习一下halcon深度学习示例里面的边缘提取segment_edges_deep_learning.hdev(把ROI区域设置好,提取参数设置好的话,提取起来也不错的):
原图提取边缘:

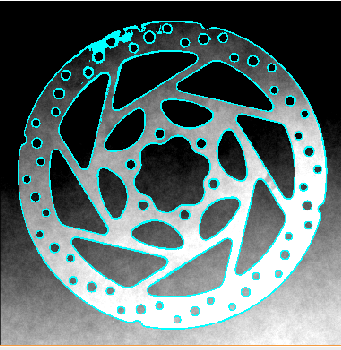
添加噪声干扰图后再提取边缘:
halcon 入门教程(三) 边缘检测的更多相关文章
- 《zw版·Halcon入门教程与内置demo》
<zw版·Halcon入门教程与内置demo> halcon系统的中文教程很不好找,而且大部分是v10以前的版本. 例如,QQ群: 247994767(Delphi与halcon), 共享 ...
- 无废话ExtJs 入门教程三[窗体:Window组件]
无废话ExtJs 入门教程三[窗体:Window组件] extjs技术交流,欢迎加群(201926085) 1.代码如下: 1 <!DOCTYPE html PUBLIC "-//W3 ...
- PySide——Python图形化界面入门教程(三)
PySide——Python图形化界面入门教程(三) ——使用内建新号和槽 ——Using Built-In Signals and Slots 上一个教程中,我们学习了如何创建和建立交互widget ...
- Elasticsearch入门教程(三):Elasticsearch索引&映射
原文:Elasticsearch入门教程(三):Elasticsearch索引&映射 版权声明:本文为博主原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明. 本文 ...
- RabbitMQ入门教程(三):Hello World
原文:RabbitMQ入门教程(三):Hello World 版权声明:本文为博主原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog. ...
- JasperReports入门教程(三):Paramters,Fields和Detail基本组件介绍
JasperReports入门教程(三):Paramter,Field和Detail基本组件介绍 前言 前两篇博客带领大家进行了入门,做出了第一个例子.也解决了中文打印的问题.大家跟着例子也做出了de ...
- WebGL入门教程(三)-webgl动画
前面文章: WebGL入门教程(一)-初识webgl WebGL入门教程(二)-webgl绘制三角形 WebGL动画有移动.旋转和缩放,我们将移动.旋转和缩放图形,然后将其绘制到屏幕上,称为变换(tr ...
- 无废话SharePoint入门教程三[创建网站集和网站]
一.前言 前两篇文章讲解了什么是SharePoint,并且介绍了在SharePoint中一些常用的概念.但概念终究是概念,我们还是要脚踏实地的去动手实践.下面的文章对于了解SharePoint的人来说 ...
- Spring Cloud 入门教程(三): 配置自动刷新
之前讲的配置管理, 只有在应用启动时会读取到GIT的内容, 之后只要应用不重启,GIT中文件的修改,应用无法感知, 即使重启Config Server也不行. 比如上一单元(Spring Cloud ...
- MVC5 + EF6 完整入门教程三
期待已久的EF终于来了. 学完本篇文章,你将会掌握基于EF数据模型的完整开发流程. 本次将会完成EF数据模型的搭建和使用. 基于这个模型,将之前的示例添加数据库查询验证功能. 文章提纲 概述 & ...
随机推荐
- 题解:CF727F Polycarp's problems
link. 贪心做法. 本题贪心做法的实质就是用整数尽量多地抵消该整数后面的负数. 如果正着做,没有办法考虑全该数后面的所有负数,所以倒着做. 例如当前遍历到了 \(50\),此时序列如下: \[\d ...
- Netty与NIO服务器-NIO中的零拷贝
1.什么是零拷贝 一种避免 CPU 将数据从一块存储拷贝到另外一块存储的技术.针对操作系统中的设备驱动程序.文件系统以及网络协议堆栈而出现的各种零拷贝技术极大地提升了特定应用程序的性能,并且使得这些应 ...
- 平滑升级mariadb
问题 Centos7自带的MariaDB版本是5.5 ,版本过于老旧,现想升级到最新版本,且数据不丢失 措施 备份原来的数据 mysqldump -u root -p --all-databases ...
- 一篇关于c语言的大补帖
一晃今年又开始了,作为一个失意的中年技术男,现在的心境真的是五味杂陈.赶紧写一篇吧,我怕过了这个点,今年就在没有那个心情去写了. 因为是基础嘛,从事软件开发以来c或者c++相关的东西断断续续 也刷了差 ...
- 一种Mysql和Mongodb数据同步到Elasticsearch的实现办法和系统
本文分享自天翼云开发者社区<一种Mysql和Mongodb数据同步到Elasticsearch的实现办法和系统>,作者:l****n 核心流程如下: 核心逻辑说明: MySQL Binlo ...
- 赶上AI的大潮:在VSCode中使用DeepSeek编程的极简方法
1 赶上AI的大潮:在VSCode中使用DeepSeek编程的极简方法 1.1 背景 DeepSeek在春节期间突然大行其道,欣喜国力大增的同时,对于普通IT工作者,如何才能享受这一波AI红利,让 ...
- Arduino语法--数据类型
Arduino与C语言类似,有多种数据类型.数据类型在数据结构中的定义是一个值的集合,以及定义在这个值集上的一组操作,各种数据类型需要在特定的地方使用.一般来说,变量的数据类型决定了如何将代表这些值的 ...
- QT5笔记:12. 字符串和数值之间的转换
字符串与进制转换的例子 /** * @brief Widget::on_btnCalcHex_clicked 从界面上获取十六进制字符串,然后转为十进制和二进制字符串写回界面 */ void Widg ...
- 离线安装Docker社区版详细教程
Docker是一个开源的应用容器引擎,使得开发者可以打包应用以及依赖包到一个轻量级的.可移植的容器中,然后发布到任何支持Docker的平台上.本文将详细介绍如何在离线环境下安装Docker社区版. 1 ...
- mybatis - [04] mapper文件详解
Mybatis的Mapper文件(通常是以.xml为扩展名的文件)主要用于定义SQL语句和它们与Java接口方法之间的映射关系.以下是Mapper文件中一些常用的配置元素和属性. 一.mapper ...