ModelArts 与HiLens Kit联合开发丨行人社交距离风险提示Demo
摘要:本Demo使用YOLOv3_Resnet18模型来检测的视频流中的行人,获取行人坐标(即图中蓝色方框),然后计算所有检测到的人之间的相互“距离”。
前情提要
听到行人社交距离风险提示是不是觉得有点不太明白,简单来说,就是通过某一角度的视觉信息,判断行人的社交距离情况,让我们直接看视频来领会吧。

这是在华为HiLens Kit上部署推理保存的视频,通过计算行人间社交距离给出“High Risk” 或“Low Risk”的提示,下面来具体介绍一下。
社交距离检测介绍
本Demo使用YOLOv3_Resnet18模型来检测的视频流中的行人,获取行人坐标(即图中蓝色方框),然后计算所有检测到的人之间的相互“距离”。这里要注意的是和现实生活中使用的长度单位来衡量距离不一样的是,在计算机视觉世界中使用的是“像素”,一种简单的方法是根据行人坐标来计算检测到的两个人的质心,也就是根据检测到的目标框的中心之间相隔的像素值作为计算视觉世界中的“距离”来衡量视频中的人之间的距离是否超过安全距离。
Demo主要分为两部分:行人检测和社交距离计算,大体流程如下:
1. 使用YOLOv3_Resnet18算法检测输入视频或视频流中的所有行人,得到行人坐标,并根据此计算位置信息和质心位置;
2. 根据第1步的信息,计算所有检测到的行人的人质心之间的相互距离;
3. 根据上一步计算得到的社交距离,对比预先设置的安全距离,从而计算每个人之间的距离对,检测两个人之间的距离是否小于N个像素,小于则处于安全距离,反之则不处于安全距离。
这里使用的是YOLOv3_Resnet18算法来进行行人检测,事实上,可替换为任何一种目标检测算法,只要输出行人坐标符合本Demo要求顺序即可,比如性能更为优良的YOLOv4,甚至YOLOv5等等,值得一提的是在PC端的实现是基于最新的、训练和推理性能最佳的YOLOv5-s模型实现的,如果需要可以参考本文最下面参考部分的[1] 或[2]([1]比[2]更加详细具体,容易上手,推荐使用)。但YOLOv5是基于PyTorch实现的,不方便转换为HiLens需要的om模型使用,庆幸的是可以通过PyTorch——>onnx——>om来使用,这一点我正在尝试,也期待有优秀的同学加入进来。

上述的YOLOv3_Resnet18、原版YOLOv3_Darknet53以及最新的YOLOv5算法都可以在ModelArts AI Gallery找到哦,不仅提供了预训练模型,同时也很方便使用,小白也能起送上手,奉上链接:
YOLOv3_Resnet18 GPU版本 TensorFlow:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=948196c8-3e7a-4729-850b-069101d6e95c
YOLOv3_Resnet18 Ascend 910版本 TensorFlow:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=7087008a-7eec-4977-8b66-3a7703e9fd22
YOLOv3_Darknet53 GPU版本 TensorFlow:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=2d52a07e-ccbd-420f-8999-2ea7b4bdd691
YOLOv3 Ascend 910版本 TensorFlow:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=ff4d1e46-256e-4a76-b355-65bdf52f9a82
YOLOv5 GPU PyTorch:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=d89bf587-ed85-476a-a579-5eb3915e2753
怎么样,是不是非常丰富,选择多多呀?可以试手一下哦,会发现使用起来也是很简单的,注意ModelArts和OBS花费哦。
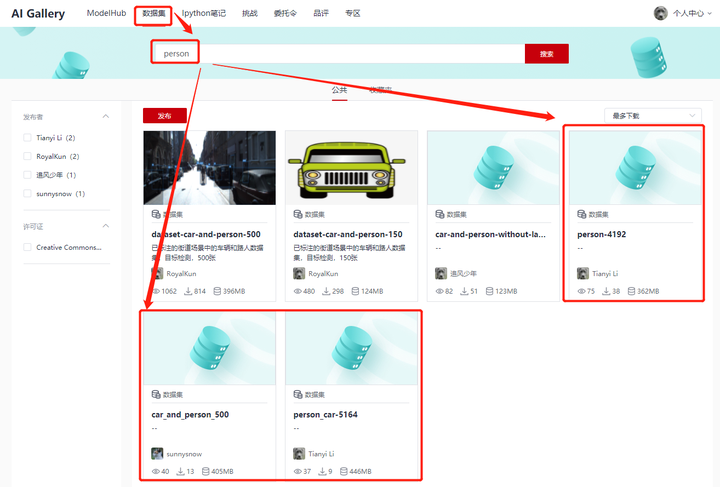
本Demo选择的是第一个——YOLOv3_Resnet18 GPU版本 TensorFlow,因为本Demo只需要对行人进行检测,所以选择了模型结构简单,训练和推理速度快的YOLOv3_Resnet18,节省训练时间,也就是节省训练成本呀。在训练方面,使用了来自开源行人数据集整理的数据集,因为只有person这一个标签,相比于COCO数据集80个标签,训练和部署推理更加具有优势,这里奉上 AI Gallery的数据集链接,没想到吧, AI Gallery不仅有算法,还有数据集,满足你的一切需要,有没有哆啦A梦的口袋的感觉(我承认我有一点夸张)
Person-4192数据集链接:https://marketplace.huaweicloud.com/markets/aihub/datasets/detail/?content_id=3d67fd03-2e16-4c70-908f-feb8f50334b9
如果你还想训练包含其他类别的情况,比如Person and Car,可参照如下。当然,一般来说,数据集越大,鲁棒性越好,这里的数据集较小,可以自行使用更大的数据集。
实操介绍
主要麻烦的部分是行人检测模型的训练,如果为了方便,可以使用基于COCO的预训练模型,在GitHub有很多。这里希望是从数据集准备开始,到订阅算法,完成训练,到HiLens Studio调试,并最终部署,体验下基于ModelArts和HiLens Kit的完整开发流程,因为以前介绍过,这里就不在赘述,详情可参考我的博文——开发教程 | 基于ModelArts与HiLens端云协同开发行人检测与跟踪方案,博文介绍的较为详细,如果有问题,可以联系我。值得注意的是这篇博文是介绍行人跟踪以及行人计数的,如果有兴趣的话,可以结合这篇博文与本博文,实现更加完善行人检测、跟踪以及社交距离检测的方案,相信在社交距离检测的基础上加入跟踪和多种人数统计方案会更加切合实用,性能更加强大。
对了,我把技能发布到技能市场了,名字是Social-Distancing-using-YOLOv3-HDMI,审核通过后,大家就能够订阅使用了,技能市场汇集了官方和第三方开发的技能,能够高效便捷地将自己开发的技能分享给他人使用,而且从分享到他人订阅以及部署到HiLens使用,完全基于网络实现,非常方便,极大促进了技能的共享。

开发体验
整体基于ModelArts和HiLens Stuio 1.5.0开发,参考开源代码实现,很惭愧的是大部分内容都是人家的,自主创新性很少。不过整体开发还是很顺利的,从得到模型到在HiLens Studio调试完成来说,不到一个下午就能搞定了,这是极致效率的体现,这得益于在线IDE HiLens Studio的使用,作为一款线上IDE,提供了开发,调试的完整功能,甚至可以在线运行调试,直接得到程序运行的可视化结果展示。同时提供了丰富的模板,基于模板开发,大大提高开发效率。
总的来说,仿佛在线有了一个自己的HiLens Kit一样,只要连接到网络,开发HiLens Stduio就能开发了,调试成功后还可以一键安装到自己的HiLens Kit上,让开发变成一件很爽的事情,而且HiLens Studio也在不断完善中,与我第一次使用最初版本相比,稳定性和性能都有了很大的提升,比如下图中红色剪头所指部分,就是后来添加的,方便开发者调试,相信研发人员也是付出了不少心血和努力,非常感谢。
ModelArts也在飞快成长,开发环境除了最初的NoteBook,也有了界面和功能更加完善的Jupyter Lab,最新测试的在线切换硬件配置,可以进行CPU和GPU,以及不同配置CPU和GPU的在线切换功能,这一点一滴地改变方便可开发者的使用,拉近了开发者与ModelArts的距离,相信ModelArts在未来会更加茁壮地成长。
注意的是,我是用的是HiLens Studio基础版,多人共用,所以有时候可能因为资源紧张,导致占用,从而运行出错,这时候可以通过创建官方案例模板运行来判断是否资源占用,一般来说,如果官方模板也运行报错,可能就是资源占用,可以考虑使用付费版,但需要额外费用哦。
下图是HiLens Studio的开发界面,有没有一种熟悉的感觉,和VS Code有些类似,这对熟悉VS Code的同学是一个福音哦。

YOLO浅谈
YOLO系列是经典的目标检测网络,在性能和速度上取得了较好的平衡,应用广泛。虽然原作者只做到了YOLOv3,但在爱好者的努力下,后续发展了YOLOv4, 已经发展到了最新的YOLOv5(暂时称为YOLOv5),注意YOLOv5的作者并没有发表论文,因此只能从代码的角度理解。
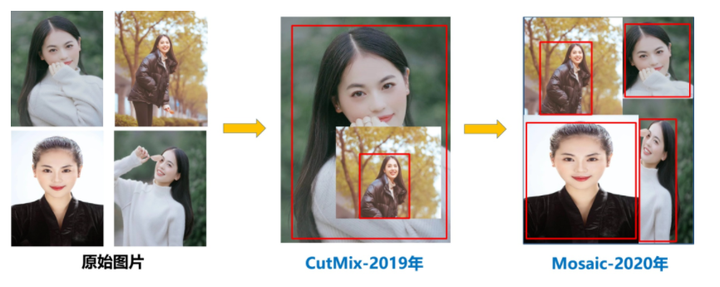
YOLOv4在YOLOv3的基础上在网络结构和预处理等很多方面进行了很多的创新,融合了当时得到验证的很多trick,性能得到了很大的提升。比如输入端采用mosaic数据增强,Backbone上采用了CSPDarknet53、Mish激活函数、Dropblock等方式,Neck中采用了SPP、FPN+PAN的结构,输出端则采用CIOU_Loss、DIOU_nms操作。
这里给出YOLO V4的网络结构图(图片来自网络):

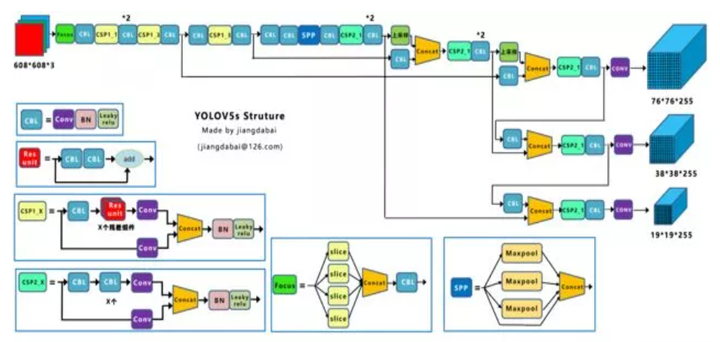
YOLOv5共有s,m,l,x四个模型,相同的数据集上,YOLOv5-s模型训练和推理性能最佳,YOLOv5-x模型mAP指标最佳。其结构其实和YOLOv4的结构还是有一定的相似之处的,但也有一些不同,这里给出YOLOv5-s的网络结构图:
下面简单介绍YOLOv5的部分改进,更多详情可参考[3]和[4]
1. 自适应Anchors计算
在YOLOv3、YOLOv4中,训练不同的数据集时,计算初始锚框的值是通过单独的程序运行的。但YOLOv5中将此功能嵌入到代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
2. CSP结构
相比于YOLOv4中只有主干网络使用了CSP结构,YOLOv5中设计了两种CSP结构,以YOLOv5-s网络为例,以CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。

相关代码如下:
class Conv(nn.Module):
# Standard convolution
def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super(Conv, self).__init__()
self.conv = nn.Conv2d(c1, c2, k, s, k // 2, groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = nn.LeakyReLU(0.1, inplace=True) if act else nn.Identity() def forward(self, x):
return self.act(self.bn(self.conv(x))) def fuseforward(self, x):
return self.act(self.conv(x)) class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super(Bottleneck, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2 def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x)) class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(BottleneckCSP, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(c2, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
self.act = nn.LeakyReLU(0.1, inplace=True)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)]) def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))
结语
基于ModelArts和HiLens(在线IDE HiLens Studio和硬件HiLens Kit )可以高效地从零开始完成一个项目的落地应用全流程,二者的无缝衔接大大提高了效率,但是真正的落地应用需要根据具体应用行业和场景实际分析,对症下药,并非如此简单,本Demo也是仅供学习使用,性能不做保证。不过相信随着ModelArts和HiLens的不断完善和发展,一切都会越来越好,汇集更多开发者,共建良好生态。
邮箱 tjulitianyi@163.com
参考
[1] https://github.com/ChargedMonk/Social-Distancing-using-YOLOv5
[2] https://github.com/Akbonline/Social-Distancing-using-YOLOv5
[3] https://github.com/ultralytics/yoloV5
[4] https://mp.weixin.qq.com/s/LE4XbU67jLWW2TQJcdXJKA
本文分享自华为云社区《行人社交距离风险提示Demo | 基于ModelArts AI Gallery与HiLens Kit联合开发》,原文作者:Tianyi_Li。
ModelArts 与HiLens Kit联合开发丨行人社交距离风险提示Demo的更多相关文章
- Demo分享丨看ModelArts与HiLens是如何让车自己跑起来的
摘要:基于HiLens Kit已经基本开发完成,可部署到HiLens Kit,模型的选择为基于DarkNet53的YOLOv3模型,权重为基于COCO2014训练的数据集,而车道线的检测是基于Open ...
- Halcon11与VS2010联合开发
刚开始学习Halcon,需要使用Halcon与C++联合开发软件,查了网上的资料都是Halcon10的,我用的是Halcon11和VS2010的开发环境,实践了一下发现有一些问题,于是把自己的配置的过 ...
- 《中日韩联合开发 - Asianux Server 3》(Asianux Server 3.0)[ISO]
中文名: 中日韩联合开发 - Asianux Server 3英文名: Asianux Server 3.0资源格式: 光盘镜像发行时间: 2007年制作发行: 红旗软件(中国)MiracleLinu ...
- VS2017的MVC和Angular联合开发的配置文件作用
在通过MVC和Angular联合开发项目时,项目里有几个重要的配置文件,下面列出这几个配置文件的分析和比较: 主要配置文件有appsettings.json,tsconfig.json,package ...
- Struts2与Hibernate联合开发步骤
hibernate与struts2的联合开发步骤: 1. 建立web工程 2. 加入jar包,struts2.hibernate.数据库连接的包 3. 数据表和bean之间的映射,以及相应的映射文件* ...
- Autoware 标定工具 Calibration Tool Kit 联合标定 Robosense-16 和 ZED 相机!
一.安装 Autoware & ZED 内参标定 & 外参标定准备 之前的这篇文章:Autoware 进行 Robosense-16 线雷达与 ZED 双目相机联合标定! 记录了我用 ...
- ArcGIS API for JavaScript开发环境搭建及第一个实例demo
原文:ArcGIS API for JavaScript开发环境搭建及第一个实例demo ESRI公司截止到目前已经发布了最新的ArcGIS Server for JavaScript API v3. ...
- DX11 Without DirectX SDK--04 使用DirectX Tool Kit帮助开发
回到 DirectX11--使用Windows SDK来进行开发 DirectX Tool Kit下载 DirectX Tool Kit是一个包含许多类的集合,用于为公共Windows平台编写Dire ...
- DirectX11 With Windows SDK--04 使用DirectX Tool Kit帮助开发
前言(2018/11/4) DXTK库现在已经不随Github项目提供,因为只用到了其中的键鼠类,已经过提取加入到后续的项目中 但是如果你需要配置DirectXTK到自己的项目当中,可以参考这篇博客进 ...
随机推荐
- informix部署安装
informix部署安装 一.环境准备 Linux版本:centos7.6 Linux主机名:localhost informix安装包:ibm.ids.14.10.FC4W1.LNX.tar inf ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- Redis基础篇(八)数据分片
现在有一个场景:要用Redis保存5000万个键值对,每个键值对大约是512B,要怎么部署Redis服务呢? 第一个方案,也是最容易想到的,需要保存5000万个键值对,每个键值对约为512B,一共需要 ...
- VMware 16.1虚拟机安装
VMware 16.1创建虚拟机 1.1首先打开我们安装好的VMware点击创建新的虚拟机 典型为自动安装,接口位默认 自定义安装更自由,可以把按需求选择 VMware16版本,只能选择Worksta ...
- 【渲染教程】使用3ds Max和ZBrush制作卡通风格的武器模型(上)
克里斯蒂娜·马丁(CristinaMartín)介绍了她的项目灵剑(Spirit Sword)的制作过程,并详细的展示了使用3ds Max和ZBrush制作模型,纹理绘画和最终展示的过程. 介绍 克里 ...
- 【环境搭建】SSM 整合使用
SSM 整合使用 文章源码 搭建整合环境 整合说明 SSM 整合可以使用多种方式,但是选择 XML + 注解 的方式最为合适. 整合思路 搭建整合环境 Spring 环境搭建并测试 Spring 整合 ...
- Java开发手册之数据库规约
1.不要使用 count(列名)或 count(常量)来替代 count(*),count(*)是 SQL92 定义的标准统计行数的语法,跟数据库无关,跟 NULL 和非 NULL 无关. 2.cou ...
- zabbix的汉化
1.在windows中找一个自己喜欢的字体(C:\Windows\Fonts)或者去网上下载一个 2.将字体上传到zabbix的web相关目录的fonts目录下 (我的zabbix的web相关的文件都 ...
- kubernets之存活探针
一 存活探针存在的意义 1.1 kubernet通过存活探针(liveness probe)检查容器是否还在运行,可以为pod中的每个容器单独指定存活探针,如果探针执行失败,kubernets会 ...
- java创建线程安全的类
如果一个对象想要被多个线程安全的并发访问,那么这个对象必须是或线程安全的或事实不可变的或由锁来保护的. 1.java监视器模式 大多数对象都是组合对象.当从头开始构建一个类,或者将多个非线程安全的类组 ...