OpenCV学习笔记(13)——轮廓特征
- 查找轮廓的不同特征,例如面积,周长,重心,边界等
1.矩
图像的矩可以帮助我们计算图像的质心,面积等。
函数cv2.momen()会将计算得到的矩以一个字典的形式返回,
我们的测试图像如下:
例程如下:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('8.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
im,contours,hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0]
M = cv2.moments(cnt)
print(M)
#会返回一个字典
#计算重心
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
2.轮廓面积
轮廓面积可以用cv2.contourArea()计算得到,也可以使用矩,M['m00‘]
print(cv2.contourArea(cnt))
3.轮廓周长
也被称为弧长。可以使用函数cv2.arcLength()计算得到。这个函数的第二参数可以用来指定对象的形状是闭合的还是打开的(即曲线)
print(cv2.arcLength(cnt,True))#试了一下,如果强行赋予False,得到的周长会比用True短一些
4.轮廓近似
将轮廓形状近似到另外一种有更少点组成的轮廓形状,新轮廓的点的数目由我们设定的准确度来决定。使用的Douglas-Peucker算法在此不细讲了。
我们假设要在下图中找一个矩形

然而这个图凹凸不平,直接提取轮廓无法提取到一个完美的矩形。因此我们就可以使用这个函数来近似这个形状了。这个函数的第二个参数epsilon,是从原始轮廓到近似轮廓的最大距离,是一个准确度参数。因此对它的调整对最后的结果很重要。
例程如下:
# -*- coding:utf-8 -*- import numpy as np
import cv2
from matplotlib import pyplot as plt im = cv2.imread('9.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0) img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0] epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)#这个和上面的True都是表示是闭曲线
#approx得到的仅仅是几个点集,需要将其连接起来 # cv2.drawContours(im,approx,-1,(0,0,255),3) 该函数只能画出几个点
cv2.polylines(im, [approx], True, (0, 255, 0), 2)#需要用这个函数才能画出轮廓,中间的True也是指示是否为闭曲线的 cv2.imshow('img',im)
cv2.waitKey(0)
最终效果如下:
指定为10%时: 指定为1%时:
指定为1%时:
5.凸包
凸包与轮廓近似相似,有些时候他们给出的结果是一样的,但是本质上讲他们是不同的。函数cv2,convexHull()可以用来检测一个曲线是否具有凸性缺陷,并能纠正缺陷。一般来说,凸性曲线总是凸出来的,至少是频带。如果有地方凹进去了就被叫做凸性缺陷。如下图所示:
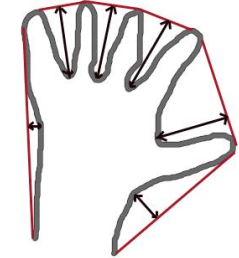
红色表示了他的凸包,而凸性缺陷被双箭头标出来了。
对于参数还有需要说明的地方:
hull = cv2.convexHull(points[],hull[],clockwise,retirnPoints)
- point是我们要传入的轮廓
- hull 输出,通常不需要
- clockwise 方向标志,如果设置为True,输出的凸包是顺时针方向的,否则为逆时针方向
- returnPoints 默认为True。它会返回凸包上点的坐标。如果设置为False,则会返回凸包点对应于原轮廓上的点坐标
实际操作中,不如需要获得上面的凸包,只需要:
hull = cv2.convexHull(cnt)
即可。但是如果你想获得凸性缺陷,需要把returnPoints设置为False。以上面的矩形为例,在获取他的轮廓cnt后,先把returnPoin设置为True查找凸包,会得到矩形的四个角点坐标。再将returnPoints设为False,将得到轮廓点的索引,即前面的四个坐标在原轮廓中的序列位置。
# -*- coding:utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
im = cv2.imread('9.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0]
hull = cv2.convexHull(cnt,returnPoints=True)
print(hull)
# cv2.drawContours(im,hull,-1,(0,0,255),3) #该函数只能画出几个点
cv2.polylines(im, [hull], True, (0, 255, 0), 2)#需要用这个函数才能画出轮廓,中间的True也是指示是否为闭曲线的
cv2.imshow('img',im)
cv2.waitKey(0)
设置为True时得到的结果是
[[[161 126]]
[[ 8 126]]
[[ 8 10]]
[[161 10]]]
是矩形四个角点的坐标
设置为False后
[[113]
[ 60]
[ 0]
[126]]
表示的是上面四个点在cnt中的索引号,且不能画出凸包了
6.凸性检测
就是检测一个曲线是不是凸的,只能返回True和False
k = cv2.isContourConvex(cnt)
7.边界矩形
有两类边界矩形。
直边界矩形 一个直矩形(就是没有旋转的矩形)。它不会考虑对象是否旋转。所以边界矩形的面积不是最小的。可以使用函数cv2.boundingRect()查找得到的。
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
返回值中,(x,y)是矩阵左上角的坐标,(w,h)是举行的宽和高。
旋转边角矩形 这个边界矩形是面积最小的,因为他考虑了对象的旋转。用到的函数为cv2.minAreaRect()。返回的是一个Box2D结构,其中包含矩形左上角角点的坐标(x,y),以及矩形的宽和高(w,h),以及旋转角度。但是要绘制这个矩形需要矩形的4个角点。可以通过函数cv2.boxPoints()获得。
# -*- coding:utf-8 -*- import numpy as np
import cv2
from matplotlib import pyplot as plt im = cv2.imread('10.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0) img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0] #直边界矩形
x,y,w,h = cv2.boundingRect(cnt)
im = cv2.rectangle(im,(x,y),(x+w,y+h),(0,255,0),2) #旋转边界矩形
s = cv2.minAreaRect(cnt)
a = cv2.boxPoints(s)
a = np.int0(a)#必须转换a的类型才能用polylines中画出,我也不知道为啥 cv2.polylines(im,[a],True,(0,0,255),3) cv2.imshow('img',im)
cv2.waitKey(0)
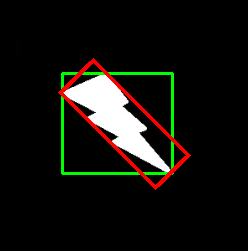
最终效果如下:
8.最小外接圆
函数cv2.minEnclosingCircle() 可以帮我们找到一个对象的外切圆。它是所有能够包括对象的圆中面积中最小的一个。例程如下:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
im = cv2.imread('10.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0]
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
im = cv2.circle(im,center,radius,(0,255,0),2)
# cv2.polylines(im,[a],True,(0,0,255),3)
cv2.imshow('img',im)
cv2.waitKey(0)

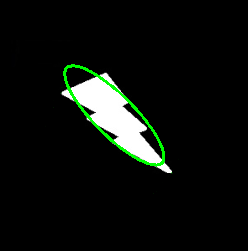
9.椭圆拟合
使用cv2.fitEllipse()找椭圆,返回值就是旋转边界矩形的内切圆。用cv2.ellipse()画椭圆
# -*- coding:utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
im = cv2.imread('10.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0]
ellise = cv2.fitEllipse(cnt)
im = cv2.ellipse(im,ellise,(0,255,0),2)
cv2.imshow('img',im)
cv2.waitKey(0)
10.直线拟合
类似ゆ根据一组点拟合出一条直线,也可以根据 图像中的白色点拟合出一条直线,不过过程较为复杂
书上的例程如下:
# -*- coding:utf-8 -*- import numpy as np
import cv2
from matplotlib import pyplot as plt im = cv2.imread('10.png')
img = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#用这个方式转换的原因是最后输出时希望能看到彩色的的轮廓图
ret,thresh = cv2.threshold(img,127,255,0) img,contours,hierarchy = cv2.findContours(thresh,1,2)
cnt = contours[0] rows,cols = im.shape[:2]
#cv2.fitLine(points, distType, param, reps, aeps[, line ]) → line
#points – Input vector of 2D or 3D points, stored in std::vector<> or Mat.
#line – Output line parameters. In case of 2D fitting, it should be a vector of
#4 elements (likeVec4f) - (vx, vy, x0, y0), where (vx, vy) is a normalized
#vector collinear to the line and (x0, y0) is a point on the line. In case of
#3D fitting, it should be a vector of 6 elements (like Vec6f) - (vx, vy, vz,
#x0, y0, z0), where (vx, vy, vz) is a normalized vector collinear to the line
#and (x0, y0, z0) is a point on the line.
#distType – Distance used by the M-estimator
#distType=CV_DIST_L2
#ρ(r) = r2 /2 (the simplest and the fastest least-squares method)
#param – Numerical parameter ( C ) for some types of distances. If it is 0, an optimal value
#is chosen.
#reps – Sufficient accuracy for the radius (distance between the coordinate origin and the
#line).
#aeps – Sufficient accuracy for the angle. 0.01 would be a good default value for reps and
#aeps.
[vx,vy,x,y] = cv2.fitLine(cnt, cv2.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
im = cv2.line(im,(cols-1,righty),(0,lefty),(0,255,0),2) cv2.imshow('img',im)
cv2.waitKey(0)
OpenCV学习笔记(13)——轮廓特征的更多相关文章
- paper 93:OpenCV学习笔记大集锦
整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的.如果有好的资源,也欢迎介绍和分享. 1:OpenCV学习笔记 作者:CSDN数量:55篇博文网址: ...
- (转) OpenCV学习笔记大集锦 与 图像视觉博客资源2之MIT斯坦福CMU
首页 视界智尚 算法技术 每日技术 来打我呀 注册 OpenCV学习笔记大集锦 整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的 ...
- OpenCV 学习笔记 07 目标检测与识别
目标检测与识别是计算机视觉中最常见的挑战之一.属于高级主题. 本章节将扩展目标检测的概念,首先探讨人脸识别技术,然后将该技术应用到显示生活中的各种目标检测. 1 目标检测与识别技术 为了与OpenCV ...
- OpenCV 学习笔记03 boundingRect、minAreaRect、minEnclosingCircle、boxPoints、int0、circle、rectangle函数的用法
函数中的代码是部分代码,详细代码在最后 1 cv2.boundingRect 作用:矩形边框(boundingRect),用于计算图像一系列点的外部矩形边界. cv2.boundingRect(arr ...
- opencv 学习笔记集锦
整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的.如果有好的资源,也欢迎介绍和分享. 1:OpenCV学习笔记 作者:CSDN数量:55篇博文网址: ...
- OpenCV学习笔记5
OpenCV学习笔记5 图像变换 傅里叶变换 这里可以先学习一下卷积分,了解清除卷积的过程和实际意义,在看这一章节的内容. 原理: 傅里叶变换经常被用来分析不同滤波器的频率特性.我们可以使用 2D 离 ...
- OpenCV学习笔记 笔记汇总
转载来源:https://www.cnblogs.com/tonyc/p/6407318.html 今后开始学习OpenCV 1:OpenCV学习笔记 作者:CSDN数量:55篇博文网址:http ...
- opencv学习笔记(七)SVM+HOG
opencv学习笔记(七)SVM+HOG 一.简介 方向梯度直方图(Histogram of Oriented Gradient,HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子 ...
- opencv学习笔记(六)直方图比较图片相似度
opencv学习笔记(六)直方图比较图片相似度 opencv提供了API来比较图片的相似程度,使我们很简单的就能对2个图片进行比较,这就是直方图的比较,直方图英文是histogram, 原理就是就是将 ...
随机推荐
- c++11 移动语义move semantics
performance, expensive object copies move semantics, temporary objects implemented with rvalue refer ...
- JLINK驱动版本更换
https://www.segger.com/downloads/jlink/JLink_Windows_V644b.exe 官网版本 Jlink的版本目录C:\Keil_v5\ARM\Segger\ ...
- 第十五届四川省省赛 SCU - 4443 Range Query
先给你1~N的N个数 再给你每种最多50个的条件(ai,bi,ci) 或者[ai,bi,ci] (ai,bi,ci)表示下标ai到bi的最小值必为ci [ai,bi,ci]表示下标ai到bi的最大值必 ...
- linux抓取usb包设置usbmon
- 阿里云端安装mysql
首先查看系统版本,是64位的centos7 file /sbin/init 安装指南如下 https://www.cnblogs.com/thinkingandworkinghard/p/671125 ...
- beautifulsoap常用取节点方法
取某个class的元素 soup.find('div', {'class', 'description'}) 取某个属性的值 download_content.find('li').find('a') ...
- 清除Tomcat缓存
删除tomcat目录下的缓存文件分别位于: tomcat/work tomcat/temp ...
- 基于node.js的websocket 前后端交互小功能
一.node var ws = require("nodejs-websocket"); console.log("开始建立连接...") var server ...
- 【bug解决】ios微信浏览器中背景音乐无法播放
我记得之前在一次项目中,出现过浏览报错: 当时的文档链接如右:[解决]HTML5新标签audio的autoplay自动播放属性失效的解决方案 所以在这次H5的制作中,我使用了iframe来加载音频文件 ...
- java批量下载
最近做了一些有关批量压缩下载的功能,网上也找了一些资源,但都不是太全面,所以自己整理一份,已备不时之需. 直接上代码: // 获取项目路径 private static String WEBC ...