红外 NEC编码
它是一种电磁波,可以实现数据的无线传输
它的波长范围为760nm ~ 1mm,不为人眼所见
紫外光波长为10-400nm
红外与蓝牙
红外:对准、直接、0-10米,单对单
蓝牙:10米左右,加强信号后最高可达100米,可以绕弯,可以不对准,可以不在同一间房间,链接最大数目可达7个,同时区分硬件
红外线系统的组成
红外线系统一般由红外发射装置和红外接收设备两大部分组成
红外发射装置又可由键盘电路、红外编码芯片、电源和红外发射电路组成
红外接收设备可由红外接收电路、红外解码芯片、电源和应用电路组成
红外遥控器发射
红外遥控器是将遥控信号(二进制脉冲码)调制在38KHz的载波上,经缓冲放大后送至红外发光二极管,转化为红外信号发射出去的
开发红外接收设备,一定要知道红外遥控器的编码方式和载波频率
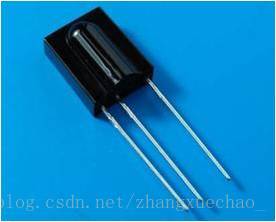
红外线接收
大多都采用成品红外接收头。均有三只引脚,即电源正(VDD)、电源负(GND)和数据输出(VOUT)
用时注意成品红外接收头的载波频率
数据格式
数据格式包括了引导码、用户码、数据码和数据码反码,编码总占32位
数据反码是数据码反相后的编码,编码时可用于对数据的纠错
第二段的用户码也可以在遥控应用电路中被设置成第一段用户码的反码

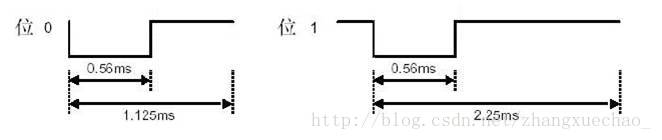
位定义
用户码或数据码中的每一个位可以是位‘1’ ,也可以是位‘0’
区分‘0’和‘1’是利用脉冲的时间间隔来区分,这种编码方式称为脉冲位置调制方式
时间间隔取一个中间值(高电平时间1秒)
举例
sbit IRIN = P3 ^ 2;
void IrInit()
{
IT0 = 1; //下降沿触发
EX0 = 1; //打开中断0允许
EA = 1; //打开总中断
IRIN = 1; //初始化端口
}
void ReadIr() interrupt 0
{
u8 j, k;
u16 err;
Time = 0;
delay(700); //7ms
if(IRIN == 0) //确认是否真的接收到正确的信号
{
err = 1000; //1000 * 10us = 10ms, 超过说明接收到错误的信号
/*当两个条件都为真是循环,如果有一个条件为假的时候跳出循环,免得程序出错的时
侯,程序死在这里*/
while((IRIN == 0) && (err > 0)) //等待前面9ms的低电平过去
{
delay(1);
err--;
}
if(IRIN == 1) //如果正确等到9ms低电平
{
err = 500;
while((IRIN == 1) && (err > 0)) //等待4.5ms的起始高电平过去
{
delay(1);
err--;
}
for(k = 0; k < 4; k++) //共有4组数据
{
for(j = 0; j < 8; j++) //接收一组数据
{
err = 60;
while((IRIN == 0) && (err > 0)) //等待信号前面的560us低电平过去
{
delay(1);
err--;
}
err=500;
while((IRIN == 1) && (err > 0)) //计算高电平的时间长度
{
delay(10); //0.1ms
Time++;
err--;
if(Time > 30)
{
return;
}
}
IrValue[k] >>= 1; //k表示第几组数据
if(Time >= 8) //如果高电平出现大于565us,那么是1
{
IrValue[k] |= 0x80;
}
Time = 0; //用完时间要重新赋值
}
}
}
if(IrValue[2] != ~IrValue[3]) //用户码是否匹配
{
return;
}
}
}
使用逻辑分析仪分析遥控器协议
抓取的二进制值:0b00000000 – 0b11111111 – 0b00110000 – 0b11001111
因为红外接收是反相的,低位在前,高位在后。
所以解码完的数据应该是:0b00001100 = 0x0c

红外 NEC编码的更多相关文章
- MicroPython TPYBoard v102 无线红外遥控舵机(基于红外解/编码模块)
转载请注明文章来源,更多教程可自助参考docs.tpyboard.com,QQ技术交流群:157816561,公众号:MicroPython玩家汇 红外解码/编码模块介绍 模块上搭载了红外接收头.红外 ...
- 红外NEC协议
注意: 用示波器在接收头抓的电平看起来和NEC协议刚好相反, 那是因为:HS0038B 这个红外一体化接收头,当收到有载波的信号的时候,会输出一个低电平,空闲的时候会输出高电平. 具体情况,具体分析. ...
- 红外解码编码学习----verilog
在设计中运用红外遥控器可以很好的解决按键缺少的问题,还可以方便的控制产品. 红外发射部分: 红外发射管: 判断红外发射管的好坏 : 电路原理图: 接收部分: 传输的NEC协议: 本实验电路: veri ...
- 蓝牙BLE实用教程
蓝牙BLE实用教程 Bluetooth BLE 欢迎使用 小书匠(xiaoshujiang)编辑器,您可以通过 设置 里的修改模板来改变新建文章的内容. 1.蓝牙BLE常见问答 Q: Smart Re ...
- 蓝牙BLE实用教程(转载)
欢迎使用 小书匠(xiaoshujiang)编辑器,您可以通过 设置 里的修改模板来改变新建文章的内容. 1.蓝牙BLE常见问答 Q: Smart Ready 和 Smart 以及传统蓝牙之间是什么关 ...
- 38KHz,NEC红外模拟发送和接收程序
/*************************************************************************************************/ ...
- 基于Arduino、STM32进行红外遥控信号接收
catalogue . 遥控器原理简介 . 红外遥控原理 . 常见红外遥控器红外线信号传输协议 . 遙控器的发展 . 实验过程 . 攻击面 . 基于STM32实现红外信号解码 1. 遥控器原理简介 0 ...
- Android使用AudioTrack发送红外信号
最近要做一个项目,利用手机的耳机口输出红外信号,从而把手机变成红外遥控器,信号处理的知识基本都还给老师了,刚开始真的挺头疼.找了不少资料研究了一下,总算有点心得,在这里做个备忘. 一.音频信号输出原理 ...
- 玩转X-CTR100 l STM32F4 l 红外遥控接收
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] X-CTR100控制器具有红外接收头,例程 ...
随机推荐
- Objective-C如何自己实现一个基于数组下标的属性访问模式
在iOS6.0以及OS X10.8之后,Apple引入了一套非正式协议(informal protocol)与Objective-C语法直接绑定.当你实现了这其中的方法之后即可使用数组下标来访问属性元 ...
- python select模块
Python select 一.前言 Python的select()方法直接调用操作系统的IO接口,它监控sockets,open files, and pipes(所有带fileno()方法的文件句 ...
- vector swap
#include <iostream>#include <vector>#include <list>#include <deque> using na ...
- pip安装软件报错 utf-8 code can't decode byte 0xcf in position7
pip安装软件报错 utf-8 code can't decode byte 0xcf in position7 根据错误提示的路径找到__init__.py文件 根据错误提示的最后几句话找到对应的行 ...
- webview的学习总结:
1.1: Weview常见的坑 及其 内存泄漏的解决方案: WebView 1. WebView常见的坑 API 16之前版本存在远程代码执行漏洞,该漏洞源自于程序没有正确限制使用WebView.ad ...
- 初始Hibernate框架
首先我们需要先创建一个案例 构建一个Student 的实体类 private String name; private Integer age; private Integer id; 在SRC根目录 ...
- list集合的一些小见解
关于LIst集合 前言: 第一次写博客,有些东西可能总结的到位,发表一下自己的一些观点,欢迎大佬们点评和指教 正文: list集合可以分为ArrayLlst和LinkedList. ArrayList ...
- jquery和Ajax(异步js和XML)的应用
Ajax不是值一种单一的技术,而是有机的利用了一系列的交互式网页应用相关的技术所形成的的结合体.它的出现,解开了无刷新更新网页的新时代,并代替传统的Web方式和通过隐藏的框架来进行异步提交的趋势,是w ...
- 【转帖】sysbench使用教程(包含ubuntu自带的0.4版本、0.5版本和最新的1.0版本)
sysbench使用教程(包含ubuntu自带的0.4版本.0.5版本和最新的1.0版本) 2018年08月10日 09:54:42 cxin917 阅读数 429 版权声明:本文为博主原创文章, ...
- 复合模式MVC
这里也只说一下简单的原理. Model:模型实现处理数据的切逻辑. View:视图呈现模型的数据和状态. Control:解读视图对模型的操作. 视图和模型之间使用观察者模式,只要模型的状态改变视图立 ...