MiniFly四轴飞行器之部分系统及电源分析
最近硬件四轴很火,了解了很久,还是选择了MiniFly,主要还是资料多,后边可以有人讨论,不像很多就是建了个群,研究问题还是在论坛方便很多。
四轴终于拿到手,功能很强大,主要是还支持二次开发,可以研究下玩玩小四轴了
还是先从硬件入手分析下
1.系统框架
主体可以分成两个小系统,后续可以按照这个顺序分析代码
1.通信部分---基于M0和NFR51822,包括电源管理
2.控制部分---基于M4和外围传感器
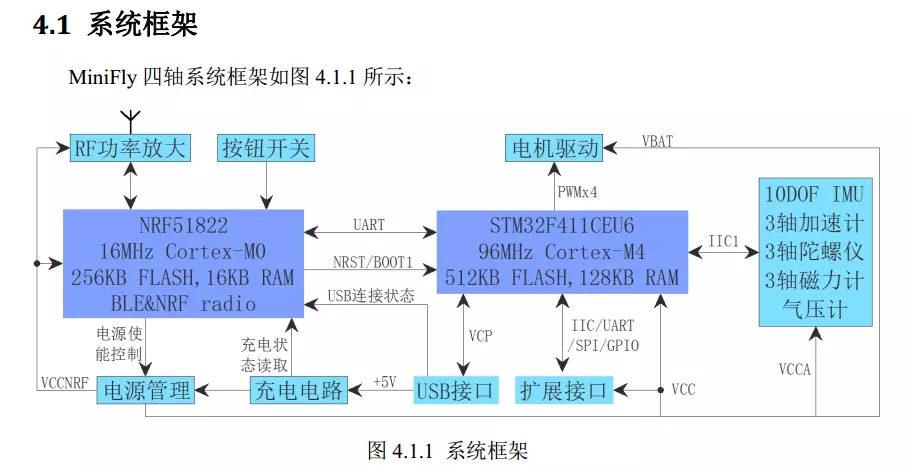
image.png
2.比较关注的电源部分
电源还是比较考究,直接包含了充电功能,不用每次使用外置的充电模块(之前自制过一个充电模块,看来以后可以集成到电路里了)
按键断电功能这个比较喜欢:这个是NFR51822控制VEN_D引脚来实现断电的
上个NFR51822部分电路
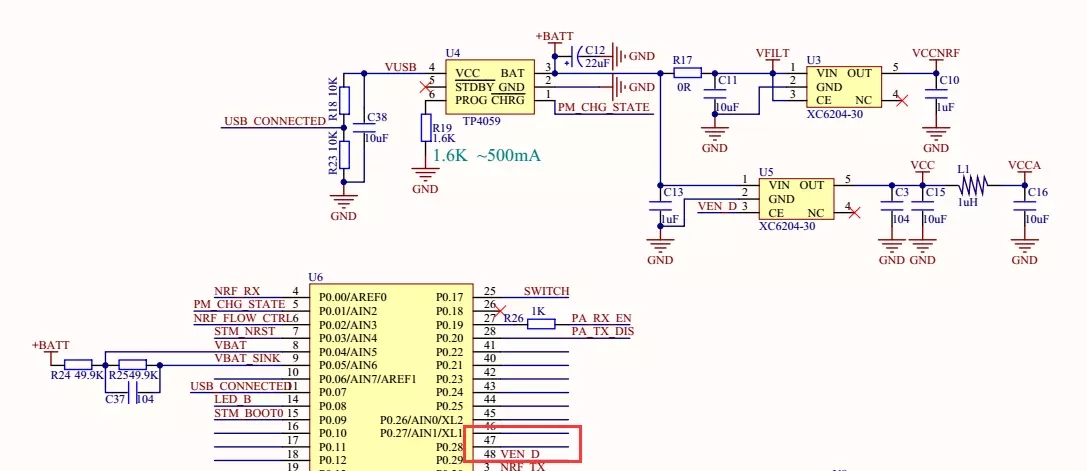
image.png
开始看代码,大致看了下程序,先是监测按键状态
/*按键扫描处理*/
void buttonProcess()
{
static unsigned int lastTick;
static unsigned int pressedTick;
static bool pressed = false;
if (lastTick != systickGetTick())
{
lastTick = systickGetTick();
if(pressed==false && BUTTON_READ()==BUTTON_PRESSED)
{
pressed = true;
pressedTick = systickGetTick();
}
else if(pressed==true)
{
if(BUTTON_READ()==BUTTON_RELEASED)
pressed = false;
if ((systickGetTick()-pressedTick) > BUTTON_LONGPRESS_TICK)
state = buttonLongPress;
else if(BUTTON_READ()==BUTTON_RELEASED)
state = buttonShortPress;
}
}
}
/*获取按键状态*/
buttonEvent_e buttonGetState()
{
buttonEvent_e currentState = state;
state = buttonIdle;
return currentState;
}
然后就是在主函数中进行相应的操作,先不说了
看下怎么实现电源开关的:这么最后应该F1部分还是有电的,只是消耗较少,寻求一种可以完全断电的方案??
/*开启电源*/
void pmPowerOn(void)
{
nrf_gpio_cfg_output(UART_TX_PIN); //使能串口TX
nrf_gpio_pin_set(UART_TX_PIN);
nrf_gpio_cfg_output(RADIO_PAEN_PIN);// 开启无线功能
nrf_gpio_pin_set(RADIO_PAEN_PIN);
nrf_gpio_cfg_output(PM_VBAT_SINK_PIN);// 设置ADC
nrf_gpio_pin_clear(PM_VBAT_SINK_PIN);
pmStartAdc(); //开启ADC转换
}
/*关闭电源*/
void pmPowerOff(void)
{
nrf_gpio_cfg_input(UART_TX_PIN, NRF_GPIO_PIN_PULLDOWN);
uartDeinit();
nrf_gpio_cfg_input(STM_NRST_PIN, NRF_GPIO_PIN_PULLDOWN);
nrf_gpio_pin_clear(STM_NRST_PIN);
nrf_gpio_pin_clear(PM_VCCEN_PIN); //关闭 LDO使能控制脚
LED_OFF();
nrf_gpio_pin_clear(RADIO_PAEN_PIN); //关闭PA
nrf_gpio_cfg_input(PM_VBAT_SINK_PIN, NRF_GPIO_PIN_NOPULL);
NRF_POWER->SYSTEMOFF = 1UL;
while(1); //进入死循环
}
void pmInit()
{
/* STM32 电源配置 */
nrf_gpio_cfg_output(PM_VCCEN_PIN);
nrf_gpio_pin_set(PM_VCCEN_PIN); //使能stm32电源
msDelay(100);
/* STM32 复位 */
nrf_gpio_cfg_output(STM_NRST_PIN);
nrf_gpio_pin_clear(STM_NRST_PIN);
msDelay(100);
nrf_gpio_pin_set(STM_NRST_PIN);
msDelay(100);
nrf_gpio_cfg_input(USB_CONNECTED_PIN, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_input(PM_CHG_STATE_PIN, NRF_GPIO_PIN_PULLUP);
pmPowerOn(); //开启电源
}
最后也是给大家分享一些四轴和stm32方面的资料方便后期的学习参考
四轴飞行器开发
http://www.makeru.com.cn/course/details/2986?s=45051
(stm32直流电机驱动)
http://www.makeru.com.cn/live/1392_1218.html?s=45051
(stm32串口应用)
http://www.makeru.com.cn/live/1392_1164.html?s=45051
stm32 如何用DMA搬运数据
http://www.makeru.com.cn/live/detail/1484.html?s=45051
MiniFly四轴飞行器之部分系统及电源分析的更多相关文章
- 四轴飞行diy全套入门教程(从最基础的开始)
转载:http://www.cnmox.com/thread-12460-1-1.html首先声明本人也是菜鸟,此教程就是从一个菜鸟的角度来讲解,现在论坛上的帖子都突然冒很多名词出来,又不成体系,我自 ...
- 系统级性能分析工具perf的介绍与使用
测试环境:Ubuntu16.04(在VMWare虚拟机使用perf top存在无法显示问题) Kernel:3.13.0-32 系统级性能优化通常包括两个阶段:性能剖析(performance pro ...
- 开启win7系统关闭日志分析
笔记本突然没有任何征兆的自动重启了,想起之前曾经在网上看过通过系统日志查看一下是哪个东东搞的鬼,于是开始上网搜索,发现默认情况下是关机的信息记录的很少,不过可以开启审计功能来记录这个捣鬼的程序.于是就 ...
- 从Android系统出发,分析Android控件构架
从Android系统出发,分析Android控件构架 Android中所有的控件追溯到根源,就是View 和ViewGroup,相信这个大家都知道,但是大家也许会不太清楚它们之间的具体关系是什么,在A ...
- 《Android系统源代码情景分析》连载回忆录:灵感之源
上个月,在花了一年半时间之后,写了55篇文章,分析完成了Chromium在Android上的实现,以及Android基于Chromium实现的WebView.学到了很多东西,不过也挺累的,平均不到两个 ...
- Android系统--Binder系统具体框架分析(二)Binder驱动情景分析
Android系统--Binder系统具体框架分析(二)Binder驱动情景分析 1. Binder驱动情景分析 1.1 进程间通信三要素 源 目的:handle表示"服务",即向 ...
- 系统级性能分析工具perf的介绍与使用[转]
测试环境:Ubuntu16.04(在VMWare虚拟机使用perf top存在无法显示问题) Kernel:3.13.0-32 系统级性能优化通常包括两个阶段:性能剖析(performance pro ...
- iOS 苹果官方 Crash文件分析方法 (iOS系统Crash文件分析方法)
时间2013-08-20 12:49:20 GoWhich原文 http://www.gowhich.com/blog/view/id/343 苹果官方 Crash文件分析方法 (iOS系统Cras ...
- Android系统--Binder系统具体框架分析(一)补充
Android系统--Binder系统具体框架分析(一)补充 补充:对Binder驱动分析一的代码补充,添加saygoobye和saygoodbye_to服务 test_server.h #ifnde ...
随机推荐
- 取消input默认提示框
input输入框有自动保存记忆功能,点击的时候之前输入的内容会在下拉框自动提示 autocomplete="off",这是H5的一个属性. <input type=" ...
- ARM架构安装ubuntu系统
一.简介 arm开发板制作系统是比较麻烦,不论使用busybox还是yocto制作根文件系统对新手都比太友好,除非深度定制,否则使用ubuntu系统既可以满足,把更多的精力放在应用开发上. 二.准备材 ...
- 六种多线程方法解决UI线程堵塞
http://blog.csdn.net/oyi319/article/details/6851371 一.六种多线程方法 .NET Framework2.0框架提供了至少4种方式实现多线程,它们是& ...
- Spring Boot 2.x 之 Spring Data JPA, Hibernate 5
1. Spring Boot常用配置项 基于Spring Boot 2.0.6.RELEASE 1.1 配置属性类 spring.jpa前缀的相关配置项定义在JpaProperties类中, 1.2 ...
- 从输入 URL 到展现页面的全过程
总体分为以下几个过程 DNS解析 TCP连接 发送HTTP请求 服务器处理请求并返回HTTP报文 浏览器解析渲染页面 连接结束 DNS解析 域名到ip地址转换 TCP连接 HTTP连接是基于TCP连接 ...
- 每日学习——C++习题
1.题目要求:求圆的面积,数据成员为半径r,定义为私有成员,要求用成员函数实现在键盘上输入圆半径,计算圆面积.输出圆面积三个功能,要求三个成员函数在类内声明,在类外定义 //定义类 class Cir ...
- 关于 CLAHE 的理解及实现
CLAHE CLAHE 是一种非常有效的直方图均衡算法, 目前网上已经有很多文章进行了说明, 这里说一下自己的理解. CLAHE是怎么来的 直方图均衡是一种简单快速的图像增强方法, 其原理和实现过程以 ...
- C#中List是链表吗?为什么可以通过下标访问
使用C#的同学对List应该并不陌生,我们不需要初始化它的大小,并且可以方便的使用Add和Remove方法执行添加和删除操作,但却可以使用下标来访问它的数据,它是我们常说的链表吗? List& ...
- django把变量变成字段进行搜索
from ceshi.models import Student #引入model中的模型 获取前端请求的参数 searchKey=request.GET.get("key" ...
- django 模版-标签-视图-csrf-token-模版继承-HTML过滤器
""" ******模版****** --定义模版-- **变量** 视图传递给模版的数据 注意1:要遵守标识符规则 语法:{{var(即变量)}} 如果使用的变量不存在 ...