【推导】zoj3981 Balloon Robot
题意:一个桌子有m个位置(首尾相接),有n支队伍坐在其中的n个位置上。有个机器人会从某个起始位置出发,每个时刻会依次发生以下三个事件:
机器人顺时针转一个单位;
某些队伍通过了题目(如果存在);
如果机器人的当前的位置的队伍需求气球,机器人就会把他需求的气球都给他。
让你对于所有可能的初始位置,最小化所有队伍的所有题目的气球等待时长之和。
设一个函数y轴是等待时间,x轴是机器人的初始位置,于是每道题恰好被分成了两个斜率为-1的一次函数。
假设某道题目是在ci时刻由bi位置的队伍通过的,y=(bi-(x+ci)%m+m)%m
最小化每个位置所有函数图像到x轴的距离之和。
只需要枚举每个一次函数与x轴的交点,尝试用当前位置的值更新答案。
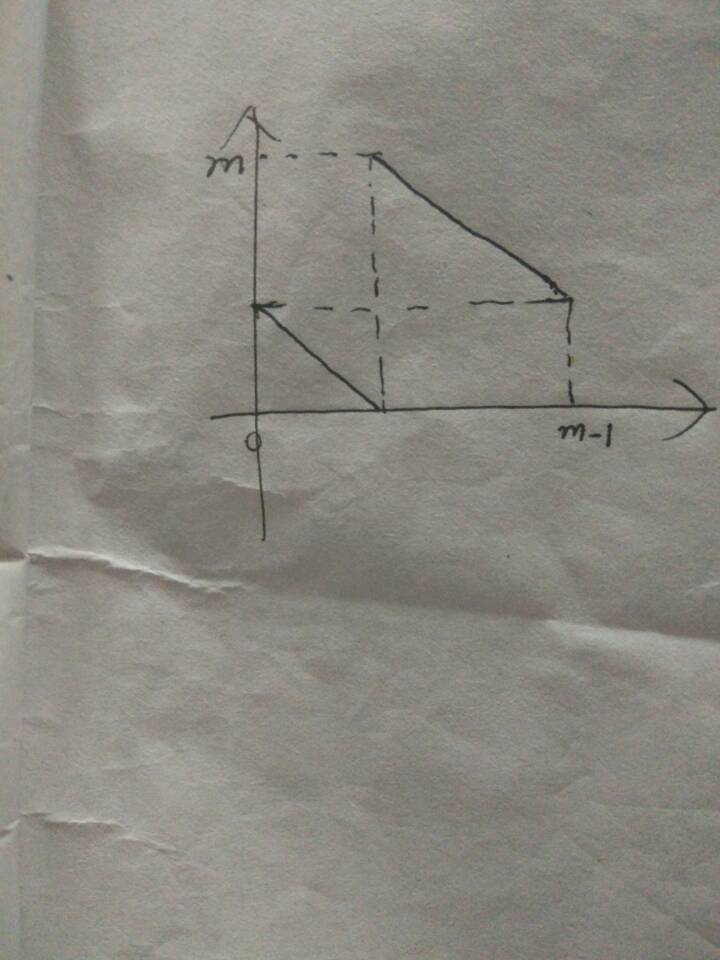
单题的函数画出来是这样的。
#include<algorithm>
#include<cstdio>
using namespace std;
typedef long long ll;
ll ans,sum;
int n,m,K,T,s[100005],b[100005],c[100005],x[100005];
int main(){
scanf("%d",&T);
for(;T;--T){
ans=sum=0;
scanf("%d%d%d",&n,&m,&K);
for(int i=1;i<=n;++i){
scanf("%d",&s[i]); --s[i];
}
for(int i=1;i<=K;++i){
scanf("%d%d",&b[i],&c[i]);
b[i]=s[b[i]];
}
for(int i=1;i<=K;++i){
x[i]=(b[i]-c[i]%m+m)%m;
sum+=(ll)x[i];
}
sort(x+1,x+K+1);
ans=sum;
for(int i=1;i<=K;++i){
sum-=(ll)(x[i]-x[i-1])*(ll)K;
ans=min(ans,sum);
sum+=(ll)m;
}
printf("%lld\n",ans);
}
return 0;
}
【推导】zoj3981 Balloon Robot的更多相关文章
- ZOJ 3981 && 2017CCPC秦皇岛 A:Balloon Robot(思维题)
A - Balloon Robot Time Limit:1000MS Memory Limit:65536KB 64bit IO Format:%lld & %llu Sub ...
- 2017CCPC秦皇岛 A题Balloon Robot&&ZOJ3981【模拟】
题意: 一个机器人在长为M的圆形轨道上送气球,当机器人到达M号点的时候下一站会回到1号点,且全程不会停止运动.现在在长为M的轨道上有N个队伍,队伍会在某个时间做需要一个气球,机器人需要送过去.一共有P ...
- zoj 3981 Balloon Robot
https://vjudge.net/problem/ZOJ-3981 题意: 有m个座位,其中n个队伍坐在这些位置上,一个队伍一个座位.当一个队A了题之后,他们们会得到气球,假设他们在a时刻A题,但 ...
- 2017 秦皇岛CCPC Balloon Robot (ZOJ 3981)
题意:给出n个队伍,m个座位,q次A题的队伍与时间,下一行是n个队伍的坐的位置,再下面q行就是第x个队再第y秒A出一道题,然后有一个机器人,开始位置由你选,他每走一步 他就会向右走一格,走到m的时候会 ...
- ZOJ - 3981 - Balloon Robot (思维)
参考自:https://blog.csdn.net/qq_36553623/article/details/78445558 题意: 第一行三个数字n, m, q表示有m个座位围成一个环,n个队伍,q ...
- ZOJ 3981:Balloon Robot(思维+递推)
题目链接 题意 有n支队在m个位置上做题,有一个机器人位置1到位置m再到位置1循环走派发气球,当队伍a在时间b做完了一道题目的时候,假如机器人走到队伍a的位置的时间为c,那么这个队伍的不开心值就是c- ...
- Balloon Robot ZOJ - 3981
大意: n个参赛队, m个座位, 一共交了p次题, 一个机器人每秒钟会从位置$i$走到$i+1$, 若在$m$直接走到$1$, 当走到一个队伍就给该队应得的气球. 对于每道题, 假设交题时间$t_a$ ...
- 2017 CCPC秦皇岛 A题 A Ballon Robot
The 2017 China Collegiate Programming Contest Qinhuangdao Site is coming! There will be teams parti ...
- 2017 CCPC Qinhuangdao Site
A. Balloon Robot 假设机器人$0$时刻位于$0$号位置,那么每个气球所需的时间为$(s_a-b)\bmod m$. 将所有气球按这个时间排序,枚举每个气球的时间作为偏移量,得出最优解即 ...
随机推荐
- 2017ACM暑期多校联合训练 - Team 2 1011 HDU 6055 Regular polygon (数学规律)
题目链接 **Problem Description On a two-dimensional plane, give you n integer points. Your task is to fi ...
- Go语言 6 结构体、方法和接口
文章由作者马志国在博客园的原创,若转载请于明显处标记出处:http://www.cnblogs.com/mazg/ Go学习群:415660935 结构体(struct)是由一系列具有相同类型或不同类 ...
- filezilla显示隐藏文件
我们在习惯使用flashfxp等工具,但是随着主机商限制较多,这些老的FTP工具不怎么好用了,比如主机商会推荐使用到Filezilla等工具.但是比如息壤主机,我们在管理linux环境下htacess ...
- windows+python3.6下安装fasttext+fasttext在win上的使用+gensim(fasttext)
真是坑了好久,faxttext对win并不是很友好,所以遇到了很多坑,记录下来,以供大家少走弯路. 法1:刚开始直接用pip install fasttext,最后一直报下面这个错误 “error:M ...
- VueJS $refs 在 ElementUI 中遇到的问题
表单验证的时候 $refs 拿不到 暂且是用 $nextTick 解决,具体原因有待研究 假入在 created 中注册时间来验证 validate,那就放在mounted中 或者...注册了 ev ...
- libuv 一 环境搭建, hello TTY
引言 - 一时心起, libuv linux 搭建 有一天突然想起来想写个动画. 找了一下 ui 库太大. 后面想起以前弄过的 libuv. 但发现 libuv 相关资料也很少. 所以就有了这些内容. ...
- 设计模式之笔记--职责链模式(Chain of Responsibility)
职责链模式(Chain of Responsibility) 定义 职责链模式(Chain of Responsibility),使多个对象都有机会处理请求,从而避免请求的发送者和接收者之间的耦合关系 ...
- 头像截图上传三种方式之一(一个简单易用的flash插件)(asp.net版本)
flash中有版权声明,不适合商业开发.这是官网地址:http://www.hdfu.net/ 本文参考了http://blog.csdn.net/yafei450225664/article/det ...
- MySQL-开发规范升级版
一.基础规范 表存储引擎必须使用InnoDB 表字符集默认使用utf8,必要时候使用utf8mb4 解读: (1)通用,无乱码风险,汉字3字节,英文1字节 (2)utf8mb4是utf8的超集,有 ...
- MySql学习笔记——存储函数
在学习完存储过程后,今天主要回顾一下mysql中的存储函数的知识. 函数与存储过程的区别 首先,存储函数也是过程式对象之一,与存储过程相似.它们都是由SQL和过程式语句组成的代码片断,并且可以从应用程 ...