pytorch深度学习60分钟闪电战
https://pytorch.org/tutorials/beginner/deep_learning_60min_blitz.html
官方推荐的一篇教程
Tensors
#Construct a 5x3 matrix, uninitialized:
x = torch.empty(5, 3)
#Construct a randomly initialized matrix:
x = torch.rand(5, 3)
# Construct a matrix filled zeros and of dtype long:
x = torch.zeros(5, 3, dtype=torch.long)
# Construct a tensor directly from data:
x = torch.tensor([5.5, 3])
# create a tensor based on an existing tensor. These methods will reuse properties of the input tensor, e.g. dtype, unless new values are provided by user
x = x.new_ones(5, 3, dtype=torch.double) # new_* methods take in sizes
print(x)
x = torch.randn_like(x, dtype=torch.float) # override dtype! #沿用了x已有的属性,只是修改dtype
print(x) # result has the same size
tensor操作的语法有很多写法,以加法为例
#1
x = x.new_ones(5, 3, dtype=torch.double)
y = torch.rand(5, 3)
print(x + y)
#2
print(torch.add(x, y))
#3
result = torch.empty(5, 3)
torch.add(x, y, out=result)
print(result)
##注意以_做后缀的方法,都会改变原始的变量
#4 Any operation that mutates a tensor in-place is post-fixed with an _. For example: x.copy_(y), x.t_(), will change x.
# adds x to y
y.add_(x)
print(y)
改变tensor的size,使用torch.view:
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8) # the size -1 is inferred from other dimensions
print(x.size(), y.size(), z.size())
输出如下:
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])
numpy array和torch tensor的相互转换
- torch tensor转换为numpy array
a = torch.ones(5)
print(a)
输出tensor([1., 1., 1., 1., 1.])
#torch tensor--->numpy array
b = a.numpy()
print(b)
输出[1. 1. 1. 1. 1.]
#注意!:a,b同时发生了变化
a.add_(1)
print(a)
print(b)
输出tensor([2., 2., 2., 2., 2.])
[2. 2. 2. 2. 2.]
- numpy array转换为torch tensor
a = np.ones(5)
b = torch.from_numpy(a)
np.add(a, 1, out=a)
所有的cpu上的tensor,除了chartensor,都支持和numpy之间的互相转换.
All the Tensors on the CPU except a CharTensor support converting to NumPy and back.
CUDA Tensors
Tensors can be moved onto any device using the .to method.
#let us run this cell only if CUDA is available
#We will use ``torch.device`` objects to move tensors in and out of GPU
if torch.cuda.is_available():
device = torch.device("cuda") # a CUDA device object
y = torch.ones_like(x, device=device) # directly create a tensor on GPU
x = x.to(device) # or just use strings ``.to("cuda")``
z = x + y
print(z)
print(z.to("cpu", torch.double)) # ``.to`` can also change dtype together!
--->
tensor([0.6635], device='cuda:0')
tensor([0.6635], dtype=torch.float64)
AUTOGRAD
The autograd package provides automatic differentiation for all operations on Tensors. It is a define-by-run framework, which means that your backprop is defined by how your code is run, and that every single iteration can be different.
Generally speaking, torch.autograd is an engine for computing vector-Jacobian product
.requires_grad属性设为true,则可以追踪tensor上的所有操作(比如加减乘除)
torch.Tensor is the central class of the package. If you set its attribute .requires_grad as True, it starts to track all operations on it. When you finish your computation you can call .backward() and have all the gradients computed automatically. The gradient for this tensor will be accumulated into .grad attribute.
autograd包实现自动的求解梯度.
神经网络
torch.nn包可以用来构建神经网络.
nn依赖autogard来不断地更新model中各层的参数. nn.Module包含layers,forward方法.
典型的神经网络的训练过程如下:
- 定义一个神经网络,含learnable parameters或者叫weights
- 对数据集的所有数据作为Input输入网络
- 计算loss
- 反向传播计算weights的梯度
- 更新weights,一个典型的简单规则:weight = weight - learning_rate * gradient
定义网络
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 1 input image channel, 6 output channels, 5x5 square convolution
# kernel
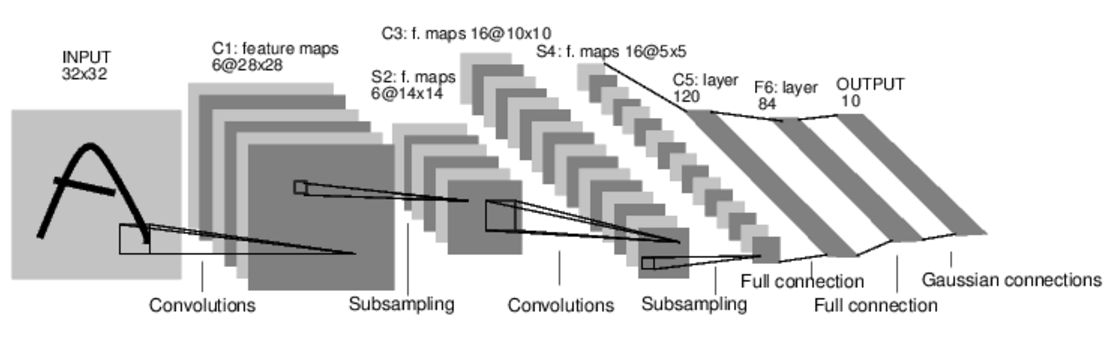
self.conv1 = nn.Conv2d(1, 6, 5) #输入是1个矩阵,输出6个矩阵,filter是5*5矩阵.即卷积层1使用6个filter.
self.conv2 = nn.Conv2d(6, 16, 5) #输入是6个矩阵,输出16个矩阵,filter是5*5矩阵.即卷积层2使用16个filter.
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120) #全连接层,fc=fullconnect 作用是分类
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
# Max pooling over a (2, 2) window
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# If the size is a square you can only specify a single number
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)
输出如下:
Net(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear(in_features=400, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
你只需要定义forward函数,backward函数(即计算梯度的函数)是autograd包自动定义的.你可以在forward函数里使用任何tensor操作.
model的参数获取.
params = list(net.parameters())
print(len(params))
print(params[0].size()) # conv1's .weight
输出如下:
10
torch.Size([6, 1, 5, 5])
以MNIST识别为例,输入图像为3232.我们用一个随机的3232输入演示一下.
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
输出如下:
tensor([[ 0.0659, -0.0456, 0.1248, -0.1571, -0.0991, -0.0494, 0.0046, -0.0767,
-0.0345, 0.1010]], grad_fn=<AddmmBackward>)
#清空所有的parameter的gradient buffer.用随机的梯度反向传播。
#Zero the gradient buffers of all parameters and backprops with random gradients:
net.zero_grad()
out.backward(torch.randn(1, 10))
回忆一下部分概念
- torch.Tensor - A multi-dimensional array with support for autograd operations like backward(). Also holds the gradient w.r.t. the tensor.
- nn.Module - Neural network module. Convenient way of encapsulating parameters, with helpers for moving them to GPU, exporting, loading, etc.
- nn.Parameter - A kind of Tensor, that is automatically registered as a parameter when assigned as an attribute to a Module.
- autograd.Function - Implements forward and backward definitions of an autograd operation. Every Tensor operation creates at least a single Function node that connects to functions that created a Tensor and encodes its history.
损失函数
nn package有好几种损失函数.以nn.MSELoss为例
output = net(input)
target = torch.randn(10) # a dummy target, for example
target = target.view(1, -1) # make it the same shape as output
criterion = nn.MSELoss()
loss = criterion(output, target)
print(loss)
输出
tensor(0.6918, grad_fn=<MseLossBackward>)
Now, if you follow loss in the backward direction, using its .grad_fn attribute, you will see a graph of computations that looks like this:
input -> conv2d -> relu -> maxpool2d -> conv2d -> relu -> maxpool2d
-> view -> linear -> relu -> linear -> relu -> linear
-> MSELoss
-> loss
print(loss.grad_fn) # MSELoss
print(loss.grad_fn.next_functions[0][0]) # Linear
print(loss.grad_fn.next_functions[0][0].next_functions[0][0]) # ReLU
输出如下:
<MseLossBackward object at 0x7ff3406e1be0>
<AddmmBackward object at 0x7ff3406e1da0>
<AccumulateGrad object at 0x7ff3406e1da0>
反向传播
调用loss.backward()重新计算梯度
#首先清空现有的gradient buffer
net.zero_grad() # zeroes the gradient buffers of all parameters
print('conv1.bias.grad before backward')
print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward')
print(net.conv1.bias.grad)
输出如下:
conv1.bias.grad before backward
tensor([0., 0., 0., 0., 0., 0.])
conv1.bias.grad after backward
tensor([-0.0080, 0.0043, -0.0006, 0.0142, -0.0017, -0.0082])
更新权重
最常见的是使用随机梯度下降法更新权重:
weight = weight - learning_rate * gradient
简单实现如下
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
torch.optim包封装了各种各样的优化方法, SGD, Nesterov-SGD, Adam, RMSProp等等.
import torch.optim as optim
# create your optimizer
optimizer = optim.SGD(net.parameters(), lr=0.01)
# in your training loop:
optimizer.zero_grad() # zero the gradient buffers
output = net(input)
loss = criterion(output, target)
loss.backward()
optimizer.step() # Does the update
训练一个分类器
并行计算
pytorch深度学习60分钟闪电战的更多相关文章
- 【PyTorch深度学习60分钟快速入门 】Part1:PyTorch是什么?
0x00 PyTorch是什么? PyTorch是一个基于Python的科学计算工具包,它主要面向两种场景: 用于替代NumPy,可以使用GPU的计算力 一种深度学习研究平台,可以提供最大的灵活性 ...
- 【PyTorch深度学习60分钟快速入门 】Part4:训练一个分类器
太棒啦!到目前为止,你已经了解了如何定义神经网络.计算损失,以及更新网络权重.不过,现在你可能会思考以下几个方面: 0x01 数据集 通常,当你需要处理图像.文本.音频或视频数据时,你可以使用标准 ...
- 【PyTorch深度学习60分钟快速入门 】Part5:数据并行化
在本节中,我们将学习如何利用DataParallel使用多个GPU. 在PyTorch中使用多个GPU非常容易,你可以使用下面代码将模型放在GPU上: model.gpu() 然后,你可以将所有张 ...
- 【PyTorch深度学习60分钟快速入门 】Part3:神经网络
神经网络可以通过使用torch.nn包来构建. 既然你已经了解了autograd,而nn依赖于autograd来定义模型并对其求微分.一个nn.Module包含多个网络层,以及一个返回输出的方法f ...
- 【PyTorch深度学习60分钟快速入门 】Part0:系列介绍
说明:本系列教程翻译自PyTorch官方教程<Deep Learning with PyTorch: A 60 Minute Blitz>,基于PyTorch 0.3.0.post4 ...
- 【PyTorch深度学习60分钟快速入门 】Part2:Autograd自动化微分
在PyTorch中,集中于所有神经网络的是autograd包.首先,我们简要地看一下此工具包,然后我们将训练第一个神经网络. autograd包为张量的所有操作提供了自动微分.它是一个运行式定义的 ...
- [PyTorch入门之60分钟入门闪击战]之入门
深度学习60分钟入门 来源于这里. 本文目标: 在高层次上理解PyTorch的Tensor库和神经网络 训练一个小型的图形分类神经网络 本文示例运行在ipython中. 什么是PyTorch PyTo ...
- 对比学习:《深度学习之Pytorch》《PyTorch深度学习实战》+代码
PyTorch是一个基于Python的深度学习平台,该平台简单易用上手快,从计算机视觉.自然语言处理再到强化学习,PyTorch的功能强大,支持PyTorch的工具包有用于自然语言处理的Allen N ...
- PyTorch深度学习实践——反向传播
反向传播 课程来源:PyTorch深度学习实践--河北工业大学 <PyTorch深度学习实践>完结合集_哔哩哔哩_bilibili 目录 反向传播 笔记 作业 笔记 在之前课程中介绍的线性 ...
随机推荐
- 使用jquery 的ajax 与 Java servlet的交互
由于是使用jquery的 所以别忘记导入jq 下面是jsp文件 <%@ page language="java" contentType="text/html; c ...
- C语言文件 "w+"与"wb+"区别
这是我今天碰到的问题,现在已经解决, 希望我的整理能够帮助到你们! w+以纯文本方式读写,而wb+是以二进制方式进行读写. mode说明: w 打开只写文件,若文件存在则文件长度清为0,即该文件内容会 ...
- XSS过滤JAVA过滤器filter 防止常见SQL注入
Java项目中XSS过滤器的使用方法. 简单介绍: XSS : 跨站脚本攻击(Cross Site Scripting),为不和层叠样式表(Cascading Style Sheets, CSS)的缩 ...
- ASP.NET中的Cookie对象
1.Cookie对象 Cookie对象一般用于在客户端保存一些针对某个用户的信息. Cookie本质上只是一小段文本字符串,改字符串一般保存在用户计算机特定文件夹下的某个文件中,每个Cookie都保存 ...
- Node中流的概念
在学习node的过程中,对于流的概念一直不是很理解,通过查阅一些资料,现在将自己对流的一些理解进行总结一下. 一.流的理解 首先我们必须知道什么是流,很多书中只是提到使用流读写文件怎么怎么方便,却不提 ...
- 解决tomcat部署项目中碰到的几个问题
在tomcat上部署项目并进行测试,经常会碰到各种问题.在不同的操作系统上部署,对问题的解决也会有一些差异. 1 发现问题 1.1 项目部署 先将项目达成war包,放到tomcat的webapps目录 ...
- 《前端之路》 之 前端 安全 XSS 原理以及防御手段
什么是 XSS 一.XSS 什么是 XSS XSS,即 Cross Site Script , 翻译过来就是 跨站脚本攻击:为了和 css 有所区分,因而在安全领域被称为 XSS. 什么是 XSS 攻 ...
- 《前端之路》之 webpack 4.0+ 的应用构建
目录 一.版本 二.webpack 的主体概念 2-1.入口 2-1-1.单页面入口 2-1-2.多页面应用的入口 2-2.输出 2-3.loader 2-4.plugins 三.如何使用 3-1 关 ...
- 生产环境一键创建kafka集群
前段时间公司的一个kafka集群出现了故障,由于之前准备不足,当时处理的比较慌乱.如:由于kafka的集群里topic数量较多,并且每个topic的分区数量和副本数量都不是一样的,如果按部就班的一个一 ...
- [PHP]引用返回与节省内存
PHP中的引用是什么:1.在 PHP 中引用意味着用不同的名字访问同一个变量内容2.引用可以被看作是 Unix 文件系统中的硬链接. 3.使用unset的话,只是删除他这个名字自身对内容的引用,并没有 ...