PCL点云特征描述与提取(2)
点特征直方图(PFH)描述子
正如点特征表示法所示,表面法线和曲率估计是某个点周围的几何特征基本表示法。虽然计算非常快速容易,但是无法获得太多信息,因为它们只使用很少的几个参数值来近似表示一个点的k邻域的几何特征。然而大部分场景中包含许多特征点,这些特征点有相同的或者非常相近的特征值,因此采用点特征表示法,其直接结果就减少了全局的特征信息。那么三维特征描述子中一位成员:点特征直方图(Point Feature Histograms),我们简称为PFH,从PCL实现的角度讨论其实施细节。PFH特征不仅与坐标轴三维数据有关,同时还与表面法线有关。
PFH计算方式通过参数化查询点与邻域点之间的空间差异,并形成一个多维直方图对点的k邻域几何属性进行描述。直方图所在的高维超空间为特征表示提供了一个可度量的信息空间,对点云对应曲面的6维姿态来说它具有不变性,并且在不同的采样密度或邻域的噪音等级下具有鲁棒性。点特征直方图(PFH)表示法是基于点与其k邻域之间的关系以及它们的估计法线,简言之,它考虑估计法线方向之间所有的相互作用,试图捕获最好的样本表面变化情况,以描述样本的几何特征。因此,合成特征超空间取决于每个点的表面法线估计的质量。如图所示,表示的是一个查询点(Pq) 的PFH计算的影响区域,Pq 用红色标注并放在圆球的中间位置,半径为r, (Pq)的所有k邻元素(即与点Pq的距离小于半径r的所有点)全部互相连接在一个网络中。最终的PFH描述子通过计算邻域内所有两点之间关系而得到的直方图,因此存在一个O(k) 的计算复杂性。
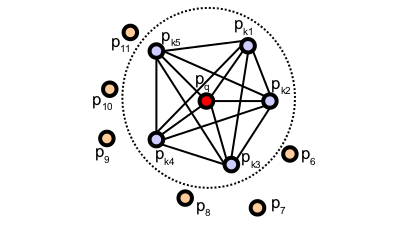
查询点 的PFH计算的影响区域
为了计算两点Pi和Pj及与它们对应的法线Ni和Nj之间的相对偏差,在其中的一个点上定义一个固定的局部坐标系,如图2所示。
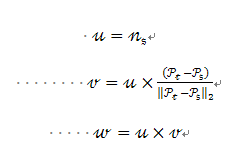

使用上图中uvw坐标系,法线 和 之间的偏差可以用一组角度来表示,如下所示:

d是两点Ps和Pt之间的欧氏距离 , 。计算k邻域内的每一对点的
, 。计算k邻域内的每一对点的 四组值,这样就把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到4个
四组值,这样就把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到4个
为查询点创建最终的PFH表示,所有的四元组将会以某种统计的方式放进直方图中,这个过程首先把每个特征值范围划分为b个子区间,并统计落在每个子区间的点数目,因为四分之三的特征在上述中为法线之间的角度计量,在三角化圆上可以将它们的参数值非常容易地归一到相同的区间内。一个统计的例子是:把每个特征区间划分成等分的相同数目,为此在一个完全关联的空间内创建有 个区间的直方图。在这个空间中,一个直方图中某一区间统计个数的增一对应一个点的四个特征值。如图3所示,就是点云中不同点的点特征直方图表示法的一个例子,在某些情况下,第四个特征量d在通常由机器人捕获的2.5维数据集中的并不重要,因为临近点间的距离从视点开始是递增的,而并非不变的,在扫描中局部点密度影响特征时,实践证明省略d是有益的。

更详细的解释:pointclouds.org/documentation/tutorials/how_features_work.php#rusudissertation
估计PFH特征
点特征直方图(PFH)在PCL中的实现是pcl_features模块的一部分。默认PFH的实现使用5个区间分类(例如:四个特征值中的每个都使用5个区间来统计),
以下代码段将对输入数据集中的所有点估计其对应的PFH特征。
#include <pcl/point_types.h> //点类型头文件 #include <pcl/features/pfh.h> //pfh特征估计类头文件 ...//其他相关操作 pcl::PointCloud<pcl::PointXYZ>::Ptrcloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::Normal>::Ptrnormals(new pcl::PointCloud<pcl::Normal>()); ...//打开点云文件估计法线等 //创建PFH估计对象pfh,并将输入点云数据集cloud和法线normals传递给它 pcl::PFHEstimation<pcl::PointXYZ,pcl::Normal,pcl::PFHSignature125> pfh; pfh.setInputCloud(cloud); pfh.setInputNormals(normals); //如果点云是类型为PointNormal,则执行pfh.setInputNormals (cloud); //创建一个空的kd树表示法,并把它传递给PFH估计对象。 //基于已给的输入数据集,建立kdtree pcl::KdTreeFLANN<pcl::PointXYZ>::Ptrtree(new pcl::KdTreeFLANN<pcl::PointXYZ>()); pfh.setSearchMethod(tree); //输出数据集 pcl::PointCloud<pcl::PFHSignature125>::Ptrpfhs(new pcl::PointCloud<pcl::PFHSignature125>()); //使用半径在5厘米范围内的所有邻元素。 //注意:此处使用的半径必须要大于估计表面法线时使用的半径!!! pfh.setRadiusSearch(0.05); //计算pfh特征值 pfh.compute(*pfhs); // pfhs->points.size ()应该与input cloud->points.size ()有相同的大小,即每个点都有一个pfh特征向量
PFHEstimation类的实际计算程序内部只执行以下:
对点云P中的每个点p
1.得到p点的最近邻元素
2.对于邻域内的每对点,计算其三个角度特征参数值
3.将所有结果统计到一个输出直方图中
微信公众号号可扫描二维码一起共同学习交流

PCL点云特征描述与提取(2)的更多相关文章
- PCL点云特征描述与提取(1)
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别.分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果.从尺度上来分,一般分为局部特征的描述和全局特征的 ...
- PCL点云特征描述与提取(4)
如何从一个深度图像(range image)中提取NARF特征 代码解析narf_feature_extraction.cpp #include <iostream> #include & ...
- PCL点云特征描述与提取(3)
快速点特征直方图(FPFH)描述子 已知点云P中有n个点,那么它的点特征直方图(PFH)的理论计算复杂度是,其中k是点云P中每个点p计算特征向量时考虑的邻域数量.对于实时应用或接近实时应用中,密集点云 ...
- PCL点云分割(1)
点云分割是根据空间,几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工作,CAD领域对零件的不同扫描表面进行分割,然后才能更好的进行空洞 ...
- 第十六节、特征描述符BRIEF(附源码)
我们已经知道SIFT算法采用128维的特征描述子,由于描述子用的是浮点数,所以它将会占用512字节的空间.类似的SUFR算法,一般采用64维的描述子,它将占用256字节的空间.如果一幅图像中有1000 ...
- PCL点云配准(1)
在逆向工程,计算机视觉,文物数字化等领域中,由于点云的不完整,旋转错位,平移错位等,使得要得到的完整的点云就需要对局部点云进行配准,为了得到被测物体的完整数据模型,需要确定一个合适的坐标系,将从各个视 ...
- PCL点云库(Point Cloud Library)简介
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=29 什么是PCL PCL(Point Cloud Library)是在吸收了 ...
- pcl点云文件格式
PCD版本 在点云库(PCL)1.0版本发布之前,PCD文件格式有不同的修订号.这些修订号用PCD_Vx来编号(例如,PCD_V5.PCD_V6.PCD_V7等等),代表PCD文件的0.x版本号.然而 ...
- PCL点云配准(3)
(1)关于点云的配准 1.首先给定源点云与目标点云. 2.提取特征确定对应点 3.估计匹配点对应的变换矩阵 4.应用变换矩阵到源点云到目标点云的变换 配准的流程图 通过特征点的匹配步骤 (1)计算源点 ...
随机推荐
- JS中getElementByID,getElementsByName,getElementsByTagName的区别
<input type="text" name="mynumber" id="mynum1" value="" / ...
- 谷歌IP地址
http://www.yuxiaoxi.com/2014-06-11-google-meet-you.html
- Eclipse Axis2 插件将代码生成WSDL指南
Eclipse Axis2 插件将代码生成WSDL指南 快速学习手册 开发工具:https://spring.io/tools 插件地址:http://axis.apache.org/axis2/ja ...
- PostgreSQL 保存json,jsonb类型
PostgresQL 字符串隐式转换JSON脚本: -- 隐式将varchar转换为json CREATE OR REPLACE FUNCTION json_in_varchar(varchar) R ...
- 获取IOS屏幕尺寸大小
转自:http://www.open-open.com/lib/view/open1395752090322.html 1.app尺寸,去掉状态栏 CGRect r = [ UIScreen main ...
- 了解HTTP协议栈(实践篇)
关于http协议的理论知识,我在这里就不详细说明了,具体下面给出的链接有.接下来都是用具体的操作显示的,各位可以结合起来看. 一.使用nc打开端口,并使用浏览器进行访问 (对应文章中的HTTP协议详解 ...
- 菜鸟学Java(九)——Servlet的基本配置
学习JavaWeb的人没有不知道Servlet的吧,而要用Servlet就需要在web.xml中进行配置.相信有很多初学者跟我当初一样,对于一些配置参数不是很理解,今天就说说Servlet最基本的配置 ...
- Hash(MD5校验工具)
本站提供md5校验工具下载.Hash(md5校验工具)是一款小巧好用的哈希计算器,Hash支持文件拖放,速度很快,可以计算文件的MD5.SHA1.CRC32 的值.在论坛上.软件发布时经常用Hash ...
- 每日英语:Auto Makers Accelerate Efforts to Develop Self-Driving Cars
Big auto makers are steering their efforts to develop cars that drive themselves out of the labs and ...
- 【delphi】delphi操作sqlite3
SQLite SQLite是一个老牌的轻量级别的本地文件数据库,完全免费且开源,不需要安装,无须任何配置,当然,这样管理功能就不是很强大了,但是它的主要应用也是在本地数据库,可以说是最简单好用的嵌入式 ...