【论文阅读】TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
Summary: 探讨planning过程中的优化问题求解,收敛的不确定性和求解的质量研究;转为混合证书整数优化问题作为非线性的初值,然后使得非线性问题能得到较高收敛率和较高效率
Type: TRO
Year: 2022
引用量: 5
参考与前言
论文链接:
A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
代码链接:无
b站讲解:【看完了 觉得很清晰 值得一看】
学术论文上B站:2022TRO-自动驾驶运动规划_哔哩哔哩_bilibili
本文相关非常细节的公式推导就不详细推了,因为坐标转换挺多的,主要就是指明一下各个部分的意义;整体说清晰吧 也很清晰,但是说复现吧 总觉得不太行 hhh,所以吴院说的对:不开源的都跳过 hhhh
CSDN 链接(以免相关发布地方有些乱码问题):Kin-Zhang 论文阅读 CSDN
博客园链接:Kin-Zhang 论文阅读 cnblog
1. Motivation
因为本身运动规划问题的约束就是存在优先级差异的,比如安全性和运动能力肯定要大于舒适性和能耗之类的。所以对前者用的硬约束,后者则用软约束;两个阶段由 阶段一找到较好的初解,阶段二进行收敛到转换任务后的全局最优解
Contribution
论文写的非常简单,主要贡献点就在构建和如何求解
- 提出了应该怎样构建motion planning问题,并使用two-stage进行优化求解
- 实验证明此方法可以有高收敛率 和 lower cost solution
2. Method
第一阶段:将前面定义好的非线性问题 进行转换 成为混合整数优化问题,此部分用Gurobi 8.1进行求解
第二阶段:使用第一阶段给出的结果作为初值,解非线性优化问题,此部分用IPOPT进行求解
2.1 框架
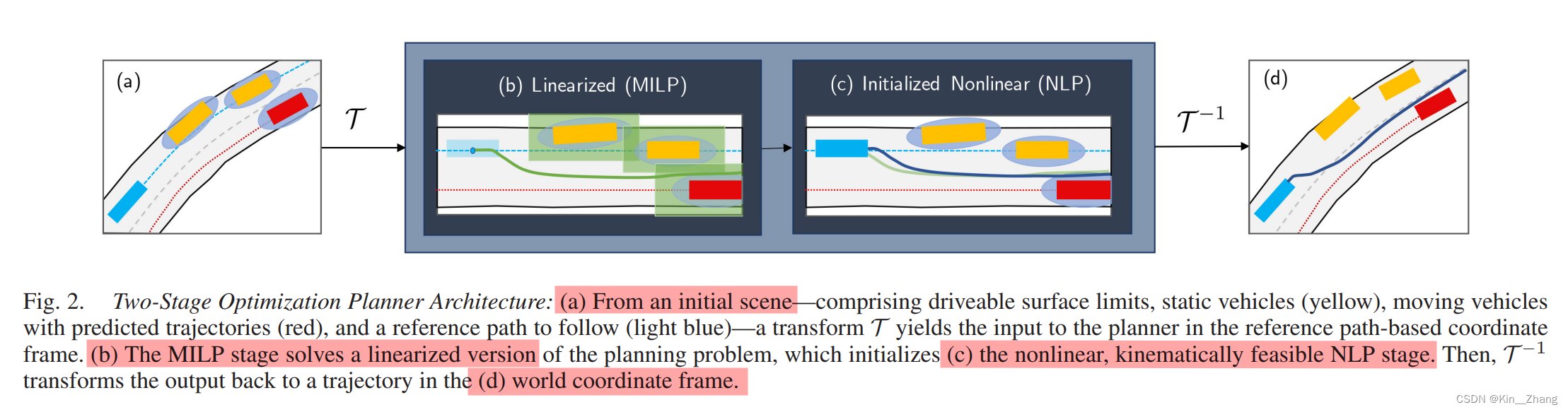
2.2 motion synthesis
这一部分主要是构建完整的问题形式,介绍了参考线坐标系和时间坐标系之间的相互转换;相关公式简单解释一下
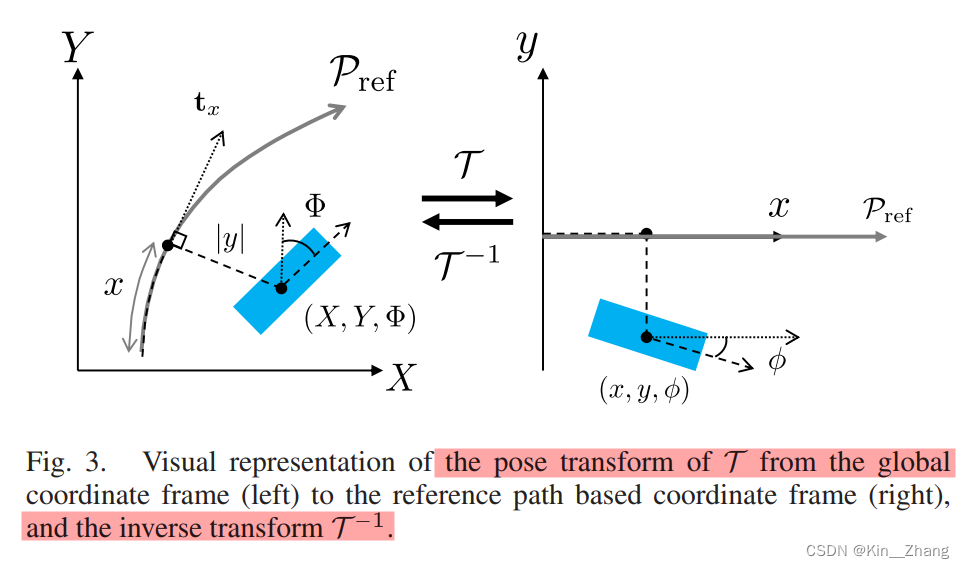
注意可能习惯了frenet坐标系会有些弄混,这里的大X, Y是世界坐标系,小x, y是参考线坐标系(其实我感觉就是frenet frame)
这是参考线下的正切和法向量,其中 \(\lambda\) 是指从参考线的起点,车沿着参考线走的距离 其实就是图三左边的小x,只是因为泛化公式所以引入了 \(\lambda \in [0, |\mathcal{P}_{ref}|]\),正切是相对于世界坐标系的,所以是大X, Y各自对参数的导数,类似于 \([\Delta X, \Delta Y]^{T}\) 这样的感觉,法向量是因为和正切是垂直的 也就是点乘为0,所以就可以得到法向量长这样了
\]
公式一的书写主要是为下面的坐标之间的转换做准备,即使用正切和法向量来转到 小x, y下
一共有三个转换:pose transform, speed transform, covariance tranform
pose 包含 \(x, y, \phi\) 其中有些惊讶的是 x是通过约束求的,即找最小的 \(\lambda\) 让点的欧式距离最小
\]
- 不过一般的x都是直接通过for循环找到的(不断step 递进),这里难道是放在约束问题里嘛?
其中y 则是 \(\hat{\mathbf{y}}=\left[\begin{array}{c}X-X^{\mathcal{P}_{\text {ref }}}(x) \\Y-Y^{\mathcal{P}_{\text {ref }}}(x)\end{array}\right]\) 即 一个从参考线点指向车中心的向量,然后乘法向量就是参考线坐标系下的y啦,公式也就是:\(y=\frac{1}{\left\|\mathbf{n}_{x}\right\|} \mathbf{n}_{x}^{\top} \cdot \hat{\mathbf{y}}\)
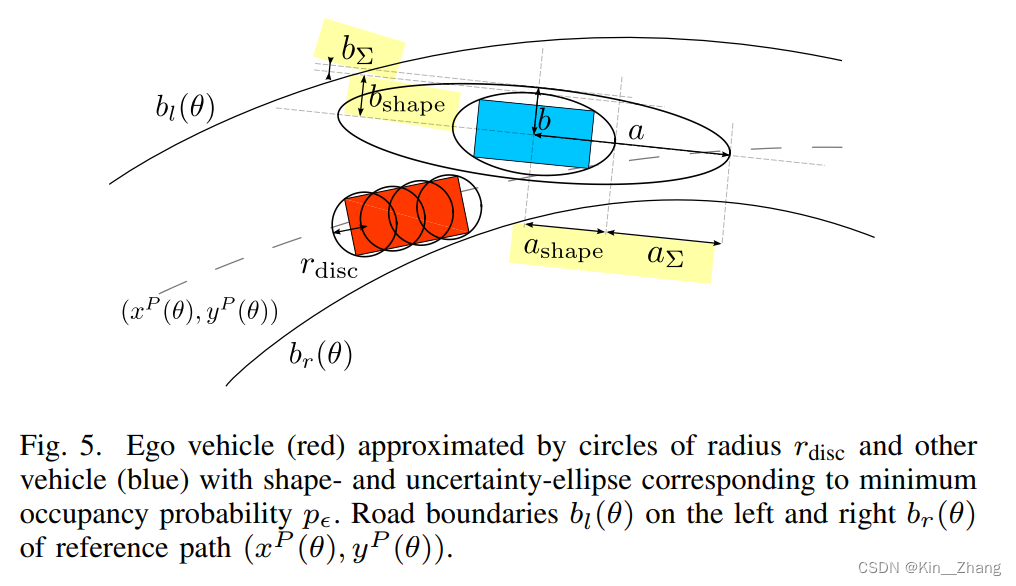
关于covariance呢则是因为每个障碍物都是有pose和协方差的,也就是此文考虑了预测/检测存在的不确定性 并放入约束中;其中不确定性考虑是参考:论文[24] Safe nonlinear trajectory generation for parallel autonomy with a dynamic vehicle model 里的图,如下
整个问题的公式是这样的:
\]
其中 最小化的是cost funtion由下面部分进行详细定义 与车位置和control有关;约束解释:
- 在任意的k从0,N是指N个离散step下
- 是指从时间k的状态\(\mathbf z_k = (x_k, y_k, \phi_k, v_k)\) 当输入\(\mathbf u_k = (a_k, \delta_k)\) 时 即加速度和转向角度,变成的下一个状态\(z_{k+1}\)的dynamical system
- 在状态所占据的空间面积 \(S(\mathbf z_k) \subset \R^2\) 和不安全的面积area为空集,即两者面积不相交
- 是根据上述论文[24] 里每一个障碍物都有一个不确定的包围圈,对于障碍物i,其概率协方差为\(\Sigma_k^i\),预测占据面积概率大于 \(p_{\epsilon}\) 也和自身的状态所占据的空间为空集,即不相交
2.3 MILP and Optimization
在2.2里面我们已经把问题定义清楚了,但是还缺乏各个部分的详细公式,这个部分主要就是简化相关的步骤,给出更为详细版的约束,构建的成为的是NLP(非线性问题)主要是以下四个部分,和求解部分一起看,更简洁点
- kinematic vehicle model
- driveable area collision
- traffic participnats’ collision
- multiobjective cost function over soft constraints
然后把问题就转成了problem 3 (Receding horizon MILP),虽然有点长:
\]
问题不大,下面一个个解释一下
在k从m,m+K是指K个离散step下,应该满足一下约束
首先是常见的自行车模型 → 但实际上在后面说明了,求解时是直接看做质点 emmm ,所以呢大概是这样的:
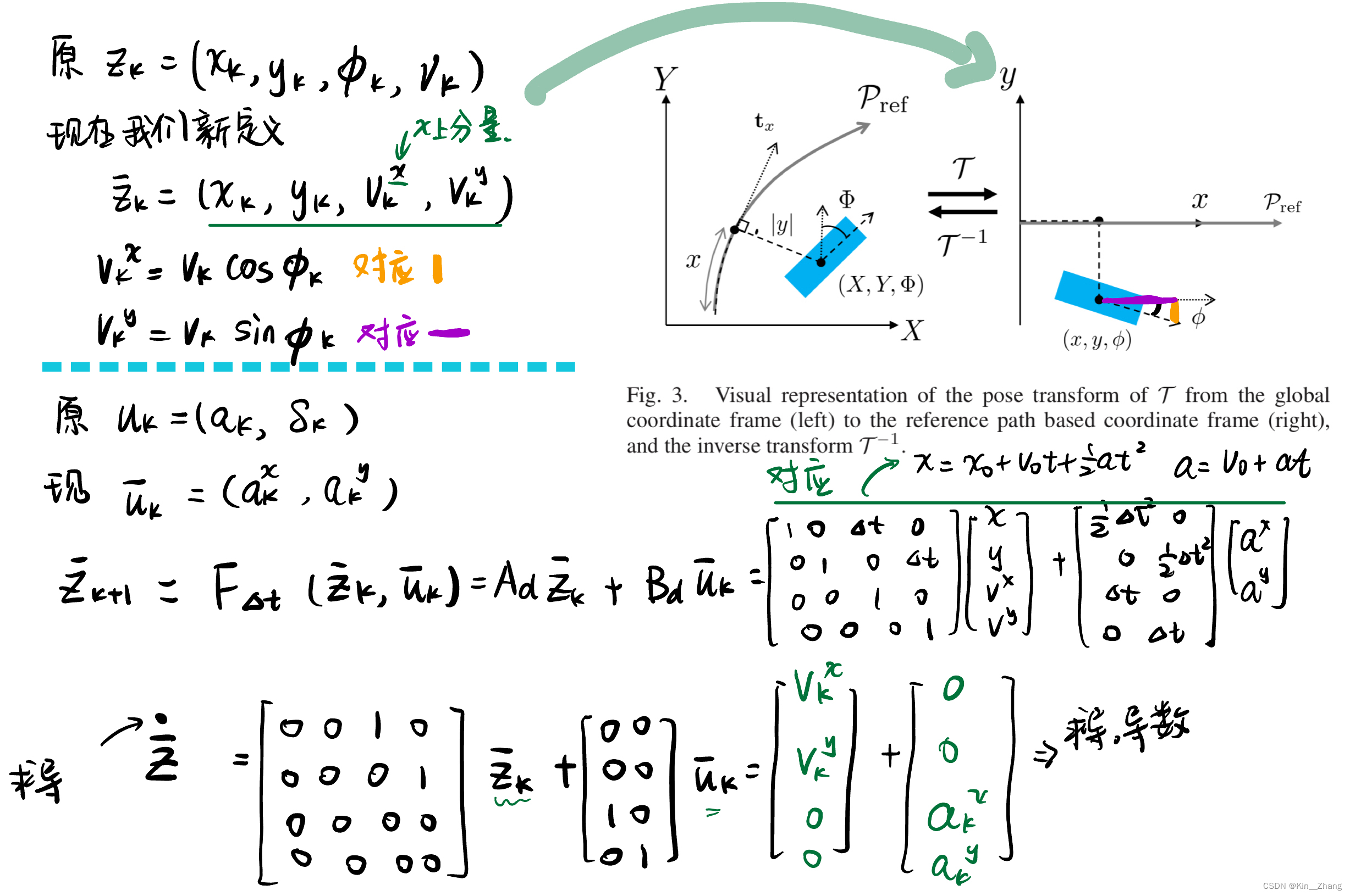
然后 因为是质点 如果不加约束的话 那 v_y 速度过大就是横着走了 当然是不行的,所以呢 加了一个限制,其中 \(\rho\)为常数, 假设 \(\phi_k\in[-\frac{\pi}{2},\frac{\pi}{2}]\) 也就是不考虑调头
\[v^{x} \geq \rho\left|v^{y}\right| \tag{15}
\]那为啥前面还写那么多自行车模型的 emmm 直接看后面这个部分,有没有前面铺垫丝毫不受影响
因为还是需要非线性的部分的,是problem 2 会用非线性求解器求解,转成MILP是提前得到一个大致的初解! 我悟了他的贡献点了
3-8 的约束全在加速度不能超过限制,速度不能超过限制,加加速度不能超限,就不过多解释了 emm 就是车都是有极限的 也不可能一脚油门 0.0001s就达到我们想要的300km/h的速度 这个意思
正常道路的行驶,也就是自身不碰到路沿,其中 \(b_{l}^{\mathcal{M}}\) 为左路沿,当然假设 \(b_{l}^{\mathcal{M}} > b_{r}^{\mathcal{M}}\),其中d指的是车宽的,简单来讲虽然我们看做了一个质点,但是计算碰撞的时候 还是看做一个长方形,然后奔着最大的那个对角线去,\(d=\sqrt{(w^2+l^2)}/2\)
\[d+b_{l}^{\mathcal{M}}\left(x_{k}\right) \geq y_{k} \geq b_{r}^{\mathcal{M}}\left(x_{k}\right)-d \tag{16}
\]这个公式有些稍稍难解释,我们回到刚刚的图五,我再copy进来
然后我们障碍物占据的空间,因为有协方差(所以是subset)其中 \(\mathcal L\) 是指椭圆的公式哈 就是咱高中学的那种 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\)
\[\mathcal{S}^{i} \subset \mathcal{L}\left(a_{\boldsymbol{\Sigma}_{k}^{i}}+a_{\text {shape }}, b_{\boldsymbol{\Sigma}_{k}^{i}}+b_{\text {shape }}\right)=\mathcal{L}\left(a_{k}^{i}, b_{k}^{i}\right)\tag{9}
\]然后我们要找到椭圆边框离车辆长方形最近的地方, \(d_x, d_y\) 为 车辆中心点 x,y 以车身长方形外扩的部分size
\[\begin{aligned}x_{k, \min }^{i} &=\left[\min _{x} \mathcal{L}\left(a_{k}^{i}, b_{k}^{i}\right)\right]-d^{x} \\x_{k, \max }^{i} &=\left[\max _{x} \mathcal{L}\left(a_{k}^{i}, b_{k}^{i}\right)\right]+d^{x} \\y_{k, \min }^{i} &=\left[\min _{y} \mathcal{L}\left(a_{k}^{i}, b_{k}^{i}\right)\right]-d^{y} \\y_{k, \max }^{i} &=\left[\max _{y} \mathcal{L}\left(a_{k}^{i}, b_{k}^{i}\right)\right]+d^{y}\end{aligned} \tag{17}
\]就是要满足,也就是说如果不在x范围内,他就一定不在y了,毕竟x是前后 如上图三坐标系
\[\left(x_{k, \min }^{i} \leq x \leq x_{k, \max }^{i} \wedge y \geq y_{k, \min }^{i}\right) \Rightarrow y \geq y_{k, \max }^{i} \tag{18}
\]然后 我们用大-M 法,去得到对应的混合整数约束,也就是当M无穷大时,公式18 可以转为 19
\[\begin{aligned}
y_{k, \max }^{i}-M \mu_{k}^{i} \leq y_{k} \text { where } & \\
\mu_{k}^{i}=\max \left(x_{k, \min }^{i}-x_{k}, 0\right)&+\max \left(x_{k}-x_{k, \max }^{i}, 0\right) \\
&+\max \left(y_{k, \min }^{i}-y_{k}, 0\right)
\end{aligned} \tag{19}
\]
最后则是我们的最小化对象 cost funtion:\(J\left(\mathbf{z}_{0: N}, \mathbf{u}_{0: N-1}\right)=\sum_{k=0}^{N} \sum_{\iota \in \mathcal{I}} \omega_{\iota} \theta_{\iota}\left(\mathbf{z}_{k}, \mathbf{u}_{k}\right)\)
其中是包含两个的,,其中w是权重哈
- 去向目标点的进度 也就是离目标点距离,比如目标点x纵向距离,速度是否达到,还有就是距离reference path的横向偏移:\(\theta_x=(x-x_g)^2, \theta_v=(v-v_g)^2, \theta_y=y^2\)
- 则是乘客舒适度由加速度和转角度平方来算,比如 \(\theta_a=a^2, \theta_{\delta}=\delta^2\)
但实际上 我们将其也转换到了MILP:\(J_{\mathcal{C}}^{\mathcal{M}, k}(\overline{\mathbf{z}}, \overline{\mathbf{u}})=\sum_{\iota \in \mathcal{C}} \Omega_{\iota} \Theta_{\iota}(\overline{\mathbf{z}}, \overline{\mathbf{u}})\)
其实吧 和上面的是差不多的,只是不是平方了 是绝对值…
- \(\Theta_{x}=\left|x-x_{g}\right|, \Theta_{v}=\left|v-v_{g}\right|,\Theta_{y}=\left|y\right|\)
- 后者则是仅加速度 \(\Theta_{a}=\left|a_y\right|\)
至此,我们介绍完了… 终于求解用的是 K-step receding horizon 滚动时域? 也就是连续求解 N-K个子问题;
整体步骤再梳理一下:
- 构建完整问题,是一个非线性的问题
- 通过简化某些部分 比如车的模型,一些约束,来将问题转化为混合整数优化问题,然后通过连续求解 N-K 个子问题,得到初解,送到非线性问题里去
- 然后非线性求解器拿到初解,进行求解
!啊 我悟了… 所以主要贡献其实就是MILP的转换及求解,这么一看 妙啊… emmm
3. 实验及结果
当然实验部分就是证明:哎 我很快,哎 我的收敛率很高!
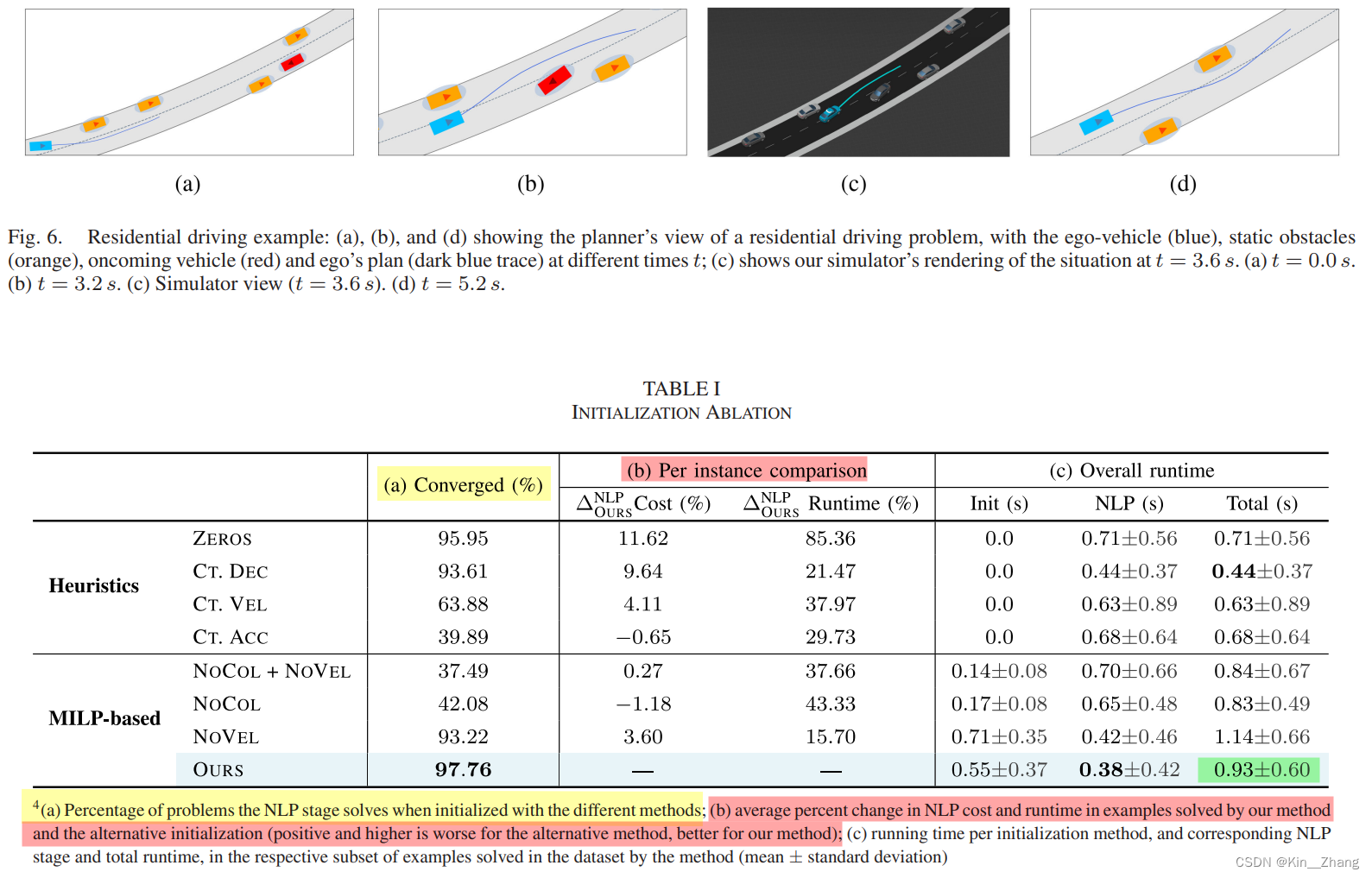
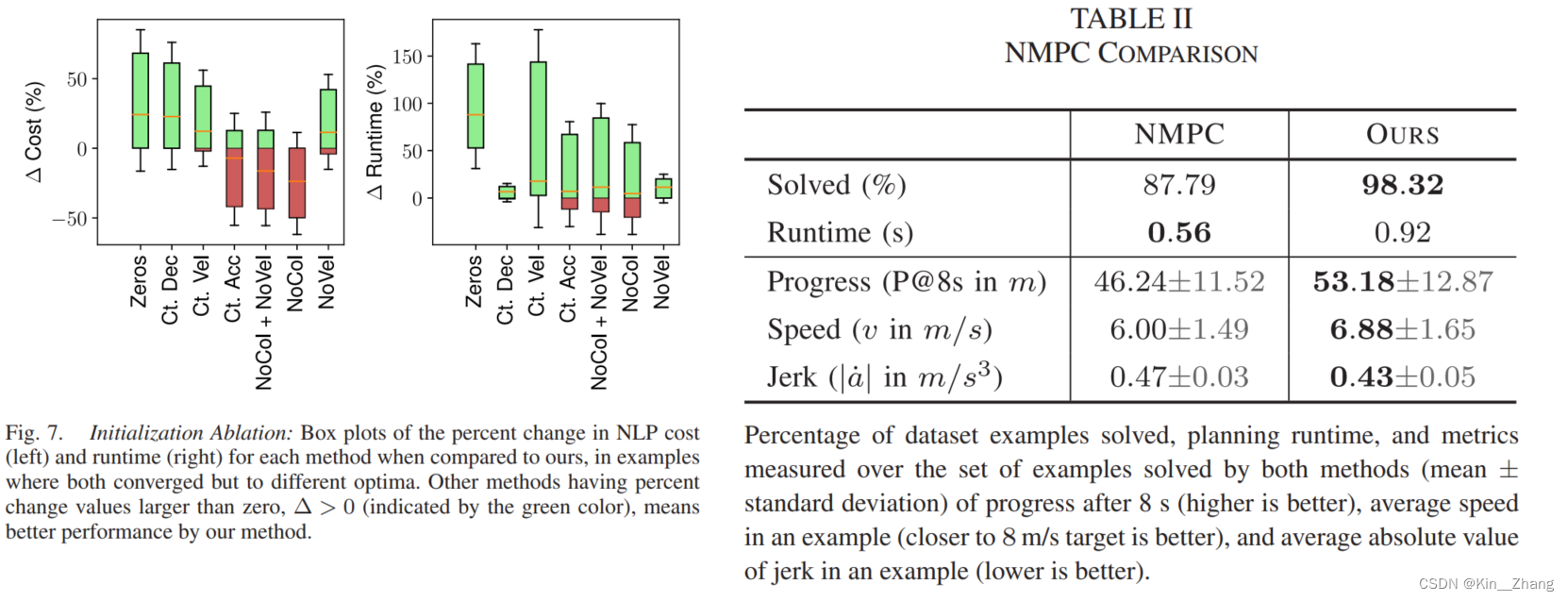
4. Conclusion
我看到了最后发现 哦吼related work原来在最后 hhhh!!!主要就是说明:哎 我们是第一个提出用混合整数优化问题作为NLP solver的warm-start的!
好的… 他承认了 yielding a comparable total runtime to our method 还是一个问题,主要是930ms 做不到真车实验吧… 不过应该是one cycle planning 一个周期的时间吧… 930ms真的还是太长了
碎碎念
关于实验设备没有细说,已发邮件询问
仔细看的时候;发现作者竟然都没提实验平台的硬件设置是怎样,就直接给出时间 作为TRO其实有点虎了… 一般对比时间都会给出实验平台的设备以便大家都进行大约的转化,就像学习领域说我在一个1030上训练2天,另一个说我只需要2小时,然后其实他是在一个3090上只需要2小时 hhh
时间对于planning这任务来说还是太长了,假设仅计算的一个周期,仅考虑planning的计算时间
给ab发这篇文章后,ab直接质问 这930ms的Planning耗时,搁谁谁能受得了 hhh,然后问了问实车正常 CPU i7-8700 16G内存,是得控制在100-300ms的响应时间的
再比如,jg做的GPIR 整体的运算周期也是在 10-100ms之间的
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【论文阅读】TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving的更多相关文章
- 论文阅读之 A Convex Optimization Framework for Active Learning
A Convex Optimization Framework for Active Learning Active learning is the problem of progressively ...
- 论文阅读 | A Curriculum Domain Adaptation Approach to the Semantic Segmentation of Urban Scenes
paper链接:https://arxiv.org/pdf/1812.09953.pdf code链接:https://github.com/YangZhang4065/AdaptationSeg 摘 ...
- Learning under Concept Drift: A Review 概念漂移综述论文阅读
首先这是2018年一篇关于概念漂移综述的论文[1]. 最新的研究内容包括 (1)在非结构化和噪声数据集中怎么准确的检测概念漂移.how to accurately detect concept dri ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- [论文阅读]阿里DIEN深度兴趣进化网络之总体解读
[论文阅读]阿里DIEN深度兴趣进化网络之总体解读 目录 [论文阅读]阿里DIEN深度兴趣进化网络之总体解读 0x00 摘要 0x01论文概要 1.1 文章信息 1.2 基本观点 1.2.1 DIN的 ...
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- 分布式多任务学习论文阅读(四):去偏lasso实现高效通信
1.难点-如何实现高效的通信 我们考虑下列的多任务优化问题: \[ \underset{\textbf{W}}{\min} \sum_{t=1}^{T} [\frac{1}{m_t}\sum_{i=1 ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
随机推荐
- 如何在M1 MACBOOK上准备好ORB-SLAM2的环境
1. 环境 M1 Macbook Air Parallels Desktop 17 关于虚拟机,在之前尝试了UTM,但是性能欠佳,卡顿情况比较多,而且未能解决联网问题,最终只能含泪放弃 Paralle ...
- To Be Vegetable
求满足下述条件的 \(n\) 阶排列 \(a\) 的数目:对每个 \(i\),要么 \(a_i-i\le a_j-j+d\) 对所有 \(j\gt i\) 成立,要么 \(a_i\ge a_j\) 对 ...
- redis aof数据持久化
AOF(Append Only File) 将我们所有的命令都记录下来,history,恢复的时候就把这个文件全部再执行一遍! 是什么 以日志的形式来记录每个写操作,将Redis执行过的所有指令记录下 ...
- HTTP 报文详解
报文的语法 所有的 HTTP 报文都可以分为两类:请求报文和响应报文.请求报文会向 Web 服务器请求一个动作,响应报文会将请求的结果返回给客户端.请求和响应报文的基本报文结构相同 请求报文的格式: ...
- 程序员天天 CURD,怎么才能成长,职业发展的思考(3)
公司赚钱流程中,你在哪一个环节 思考你在哪一个环节 在一家提供互联网产品或服务的公司中,开发出产品或提供服务,卖产品卖服务给客户,赚取金钱获得利润,有了利润这家公司就能给员工发工资,公司才能存活下去, ...
- Python语言:散修笔记
文章目录 前言 转义字符的使用 原字符 变量的定义 类型转换 注释 接收用户信息 运算规则 整除运算 幂运算 比较运算符 布尔运算 运算优先级 对象的布尔值 if else elif分支结构 条件表达 ...
- aws语音呼叫调用,告警电话
import requests data = { 'channel': '99x', 'called_number': '135xxx', 'tts_code': 'TTS_xx', 'tts_par ...
- winform cefsharp chart.js 再winform上使用chart.js 绘制动态曲线
CefSharp 是一款开源的使用.net平台基于谷歌的 封装浏览器组件,可用于winform wpf . chart.js 也是一款开源的图表展示组件. 我所作的就是使用这两个组件再winform上 ...
- 『手撕Vue-CLI』拉取模板名称
前言 好,经过上篇文章的介绍,已经可以有处理不同指令的能力了,接下来我们就来处理 vue create 指令,这个指令的本质就是从网络上下载提前准备好的模板,然后再自动安装模板中相关依赖. 所以实现 ...
- 领域驱动设计(Domain-Driven Design,简称DDD)【简介 个人学习笔记】
找到了第 1 篇资料:领域驱动设计详解:是什么.为什么.怎么做? - 知乎 找到了第 2 篇资料:领域驱动架构(DDD)建模中的模型到底是什么? - 知乎 找到了第 3 篇资料:一文看懂DDD 领域驱 ...