【目标检测】二、Fast R-CNN与SVD
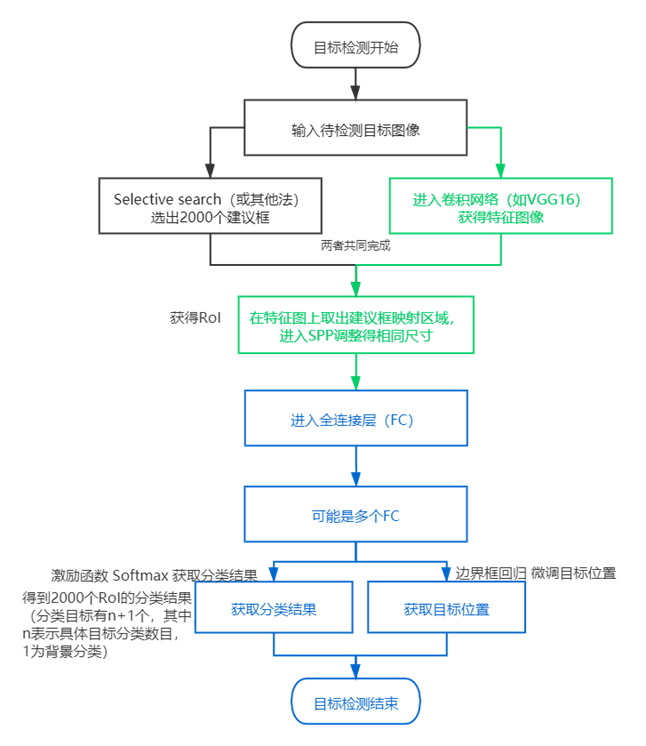
1.流程
(1) 空间金字塔池化(spatial pyramid pooling,SPP)

原理:

(2)Fast-RCNN
2.数学概念
这么多个全连接层,必然存在计算的性能问题,让数学家们蠢蠢欲动——基于奇异值分解(singular value decomposition,SVD)的全连接层计算加速方法。
降维(dimensionality reduction)处理主要方式:
|
主成分分析 Principal Component Analysis,PCA |
下文补充 |
|
因子分析 Factor Analysis |
假设观察的数据当中存在一个隐变量(latent variable),这些数据是由隐变量和噪声的线性组合而成,如果能找到隐变量,就可以减少观察数据当中噪声而达到降维效果。 |
|
独立成分分析 Independent Component Analysis,ICA |
假设一批数据是由多个数据源混合在一起的,这些数据源应该是相互独立,没有关系,若能找到有几批数据源就可以达到降维效果。 |
(1)PCA
|
(以下若有误请指正) 解n元一次的方程,得到基础解系是“基”,所有通解都可以用基础解系的向量线性表出。 假设解线性方程(n个特征列)中,初等变换后得到化简系数的矩阵,得到了矩阵的秩r,那么n-r得到n个变量中r个受到约束后剩下的n-r个自由变量。 可以这样理解,基础解系是基,由向量组成(是约束下的解的坐标系) 求得的自由变量就是这个基的轴,形如(1,0,0),(0,1,0)这样表示的三维坐标轴一样,设第一个轴是(1,0,…,0),第一个轴是(0,1,…,0),第n个轴是(0,0,…,1),得到了这些轴在m维坐标系中的方向(m=r)。每一个自由变量是基的一条轴。 如果能求到特征值和特征向量,再通过形如Av=λv的高维到低维映射,就能达到降维效果,即:矩阵A的数据在特征向量基中的表示。 其中,特征值个数=矩阵的秩,一个特征值带着一个特征向量。 这个思路下,PCA可以这样下手: 找到一个基空间(其轴的数目取数据特征列数),确定从原数据的行数据映射(点乘)到基空间的数值,这个数值就是降维结果。 而怎么确定基空间(轴的方向、长度是什么), 从几何上看,是希望找到一条线,它覆盖最大差异的数据,然后再找覆盖次大差异数据的线,以此类推。 |
方差公式σ(Sigma,大写Σ,小写σ):
拓展至协方差公式,从某种程度来说,方差也是x的协方差:

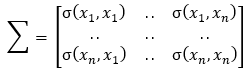
协方差矩阵Σ [2],是对称矩阵:
PCA实现 [3]:
from numpy import *
def pca(dataMat, topNfeat = 999): # shape (m, n), (t)
meanVals = mean(dataMat, axis=0) # 求得平均值
# 求新空间向量(特征向量)
meanRemoved = dataMat - meanVals
covMat = cov(meanRemoved, rowvar=0) # 求协方差矩阵
eigVals, eigVects = linalg.eig(mat(covMat)) # 求协方差矩阵的特征值及特征向量,shape (1, n) , (n, n)
eigValInd = argsort(eigVals) # 特征值排序,shape (1, n)
eigValInd = eigValInd[:-(topNfeat+1):-1] # 取特征值最大的前N个,shape (1, t)
redEigVects = eigVects[:,eigValInd] # 特征值对应的特征向量,shape (n, t)
# 将数据转换到新空间
lowDDataMat = meanRemoved @ redEigVects # 到低维的映射,其中@是点乘运算符, shape (m,n) (n,t) -> (m,t)
reconMat = (lowDDataMat @ redEigVects.T) + meanVals # 数据还原 shape (m, t) (t, n) -> (m, n)
return lowDDataMat, reconMat
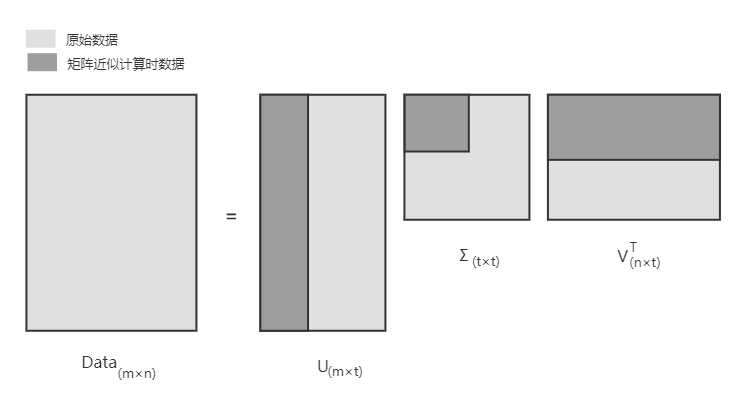
(2)奇异值分解(Singular Value Decomposition,SVD)
在大量数据下的PCA计算代价是很大的,这个时候常用SVD做矩阵分解以减少计算量。
SVD是常用的降维手段,它可以通过隐性语义索引(Latent Semantic Indexing,LSI,或者隐性语义分析Latent Semantic Analysis,LSA)应用到搜索和信息检索、推荐引擎等。(它希望在搜索一个词时,能把同义词映射为同一概念)

Σ(sigma)是一个矩阵,只有对角元素,其它元素为0。它的值就是原数据矩阵Data的奇异值,取Data的特征值开方  ,并且按从大到小的排序。
,并且按从大到小的排序。
实现的类库:
import numpy as np
U, Sigma, Vt = np.linalg.svd(np.array([[1,1],[7,7]]))
U,Sigma,Vt >>> (array([[-0.14142136, -0.98994949],
[-0.98994949, 0.14142136]]),
array([10., 0.]),
array([[-0.70710678, -0.70710678],
[-0.70710678, 0.70710678]]))
注,在大矩阵计算中,计算结果会有些许偏差,这和计算的具体实现相关,但数量级上是不变的,也即:

作矩阵分解的话,可以尝试还原矩阵,当然这是在小数据上的测试,证明一下分解的可行性,以及导致误差的可能:
import numpy as np
data = np.array([
[1,1,1,0,0],
[2,2,2,0,0],
[5,5,5,0,0],
[1,1,0,2,2],
[0,0,0,3,3],
[1,1,1,0,0],
[0,0,0,1,1]
])
U, Sigma, Vt = np.linalg.svd(data)
#print('sigma:', Sigma)
sig3 = [[Sigma[0],0,0],[0,Sigma[1],0],[0,0,Sigma[2]]]
sig3 = np.array(sig3)
U[:,:3]@Sig3@Vt[:3,:] # 多个矩阵点乘,除了numpy.linalg.multi_dot和reduce的写法,numpy(在python 3.5以后)重载了@运算符,A@B直接就是A和B的矩阵乘法。 >>>array([[ 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, -2.85152832e-16, -2.94802231e-16],
[ 2.00000000e+00, 2.00000000e+00, 2.00000000e+00, -1.48291534e-16, -1.67590333e-16],
[ 5.00000000e+00, 5.00000000e+00, 5.00000000e+00, 1.05859966e-16, 5.77213899e-17],
[ 1.00000000e+00, 1.00000000e+00, -1.05947783e-15, 2.00000000e+00, 2.00000000e+00],
[ 1.73854477e-16, 4.09482862e-16, -8.23917306e-16, 3.00000000e+00, 3.00000000e+00],
[ 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, -6.80558595e-17, -7.77052588e-17],
[ 4.44607724e-17, 1.29942461e-16, -2.79696374e-16, 1.00000000e+00, 1.00000000e+00]])
还原当中的Σ只取了3项,这个3如何确定?
一种方式:求得所有奇异值的平方和*0.9作为阈值,再逐个计算奇异值平方和累加到阈值数目为止,以此来确定矩阵Σ的大小;
另一种方式:直接由数据情况来确定,比如说直接指定2000或3000。
SVD的图像压缩示例:
def imgCompress(numSV=3, thresh=0.8):
myl = []
for line in open('0_5.txt').readlines():
newRow = []
for i in range(32):
newRow.append(int(line[i]))
myl.append(newRow)
myMat = mat(myl)
print "****original matrix******"
printMat(myMat, thresh)
U,Sigma,VT = la.svd(myMat)
SigRecon = mat(zeros((numSV, numSV))) for k in range(numSV):#construct diagonal matrix from vector
SigRecon[k,k] = Sigma[k] reconMat = U[:,:numSV]@SigRecon@VT[:numSV,:] print "****reconstructed matrix using %d singular values******" % numSV
printMat(reconMat, thresh)
imgTest.txt 内容:


00000000000000110000000000000000
00000000000011111100000000000000
00000000000111111110000000000000
00000000001111111111000000000000
00000000111111111111100000000000
00000001111111111111110000000000
00000000111111111111111000000000
00000000111111100001111100000000
00000001111111000001111100000000
00000011111100000000111100000000
00000011111100000000111110000000
00000011111100000000011110000000
00000011111100000000011110000000
00000001111110000000001111000000
00000011111110000000001111000000
00000011111100000000001111000000
00000001111100000000001111000000
00000011111100000000001111000000
00000001111100000000001111000000
00000001111100000000011111000000
00000000111110000000001111100000
00000000111110000000001111100000
00000000111110000000001111100000
00000000111110000000011111000000
00000000111110000000111111000000
00000000111111000001111110000000
00000000011111111111111110000000
00000000001111111111111110000000
00000000001111111111111110000000
00000000000111111111111000000000
00000000000011111111110000000000
00000000000000111111000000000000
关于SVD的推理/原理,暂且搁置。
|
线性代数有感: 它真的有很多性质,最后接触已经近乎三年前了,也都忘了,不过遇到也不怕吧,它花里胡哨总归是为了线性计算;它恁多的性质都是为了计算方便, 此处我只追求,我能get到其型,具体计算就不深入。 |
=======================================================================
资料:
[2] 协方差相关 https://zhuanlan.zhihu.com/p/37609917
[3]Peter Harrington著《机器学习实战》
杜鹏、谌(chen2)明、苏统华 编著《深度学习与目标检测》
【目标检测】二、Fast R-CNN与SVD的更多相关文章
- 目标检测(三) Fast R-CNN
引言 之前学习了 R-CNN 和 SPPNet,这里做一下回顾和补充. 问题 R-CNN 需要对输入进行resize变换,在对大量 ROI 进行特征提取时,需要进行卷积计算,而且由于 ROI 存在重复 ...
- 目标检测(二) SPPNet
引言 先简单回顾一下R-CNN的问题,每张图片,通过 Selective Search 选择2000个建议框,通过变形,利用CNN提取特征,这是非常耗时的,而且,形变必然导致信息失真,最终影响模型的性 ...
- 目标检测 <二> TensorFlow安装
一:创建TensorFlow工作环境目录 1. 在anconda安装目录下找到envs目录然后进入 2. 在当前目录下创建一个文件夹改名为tensorflow 二: 创建TensorFlow工作环境 ...
- 第三十节,目标检测算法之Fast R-CNN算法详解
Girshick, Ross. “Fast r-cnn.” Proceedings of the IEEE International Conference on Computer Vision. 2 ...
- 目标检测(三)Fast R-CNN
作者:Ross Girshick 该论文提出的目标检测算法Fast Region-based Convolutional Network(Fast R-CNN)能够single-stage训练,并且可 ...
- Faster-rcnn实现目标检测
Faster-rcnn实现目标检测 前言:本文浅谈目标检测的概念,发展过程以及RCNN系列的发展.为了实现基于Faster-RCNN算法的目标检测,初步了解了RCNN和Fast-RCNN实现目标检 ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
- 目标检测(二)SSPnet--Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognotion
作者:Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun 以前的CNNs都要求输入图像尺寸固定,这种硬性要求也许会降低识别任意尺寸图像的准确度. ...
- 论文笔记:目标检测算法(R-CNN,Fast R-CNN,Faster R-CNN,FPN,YOLOv1-v3)
R-CNN(Region-based CNN) motivation:之前的视觉任务大多数考虑使用SIFT和HOG特征,而近年来CNN和ImageNet的出现使得图像分类问题取得重大突破,那么这方面的 ...
- 基于候选区域的深度学习目标检测算法R-CNN,Fast R-CNN,Faster R-CNN
参考文献 [1]Rich feature hierarchies for accurate object detection and semantic segmentation [2]Fast R-C ...
随机推荐
- GOLAND-激活码-20230309
33MEHOB8W0-eyJsaWNlbnNlSWQiOiIzM01FSE9COFcwIiwibGljZW5zZWVOYW1lIjoiUG9saXRla25payBNZXJsaW1hdSBNZWxha ...
- 如何判断平台是x86还是arm
case $(uname -m) in x86_64) echo x86;; aarch64) echo arm;; esac ref 上面的代码片改自这里 https://stackoverflow ...
- MySQL启动时自动创建数据库
一.背景及分析 MysqL容器启动时,会自动创建一些必要的数据库,比如MysqL,这是官方默认的做法.但是,在实际中,还需要让MysqL自动创建我们自定义的数据库.本文就此应用场合进行探究. 一般的做 ...
- 【转载】Spring Cloud Gateway-过滤器工厂详解(GatewayFilter Factories)
http://www.imooc.com/article/290816 TIPS 本文基于 Spring Cloud Greenwich SR2 ,理论支持 Spring Cloud Greenwic ...
- Windows 记录开机后应用启动慢的问题
最近大屏产品经常报一些开机启动的问题,工厂反馈厂测软件有些模块测试不通过,家里开发测试均发现Launcher等软件首次启动需要加载10多秒. 经过小伙伴们排查,发现是刷母盘后首次开机问题概率比较大.使 ...
- StarRocks元数据无法合并
一.先说结论 如果您的StarRocks版本在3.1.4及以下,并且使用了metadata_journal_skip_bad_journal_ids来跳过某个异常的journal,结果之后就出现了FE ...
- 记录实现倒计时的方法,配合按钮的disabled
记录一个自己实现倒计时的方法,现在可以网上有很多插件,自己实现记录一下 // 倒计时 countDown() { this.disabled = true let number = 60 this.c ...
- Harbor 共享后端高可用
1. 主机配置 主机地址 主机配置 主机角色 软件版本 192.168.1.60 CPU:4C MEM:4GB Disk: 100GB Harbor+Keepalived Harbor 2.1.3 K ...
- Family of Solution Sets
欢迎投歌词!评论告诉我歌曲链接和词就好啦-大概四五天一更? Solution Set - "卷起击碎定论的漩涡" \(\to\) <夏虫> Solution Set ...
- c# Progress<T>
c# Progress<T> 用于显示进度........主要是利用IProgress<T> 的Report(T)方法: private void BtnDownload_Cl ...