Sobel边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
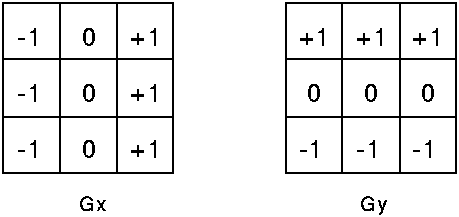
Sobel卷积因子为:
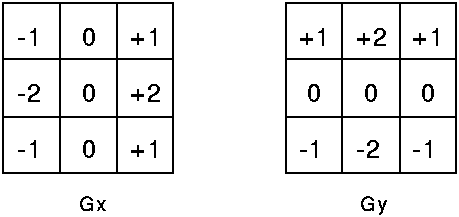
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
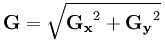
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
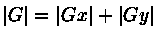
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
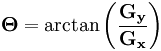
然后可用以下公式计算梯度方向:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
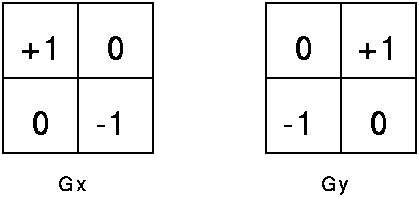
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感
Sobel边缘检测算法的更多相关文章
- 基于MATLAB的Sobel边缘检测算法实现
图像边缘就是图像灰度值突变的地方,也就是图像在该部分的像素值变化速度非常之快,就比如在坐标轴上一条曲线有刚开始的平滑突然来个大转弯,在变化出的导数非常大. Sobel算子主要用作边缘检测,它是一离散型 ...
- Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110 索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰 ...
- 基于Vivado HLS在zedboard中的Sobel滤波算法实现
基于Vivado HLS在zedboard中的Sobel滤波算法实现 平台:zedboard + Webcam 工具:g++4.6 + VIVADO HLS + XILINX EDK + ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 【算法随记】Canny边缘检测算法实现和优化分析。
以前的博文大部分都写的非常详细,有很多分析过程,不过写起来确实很累人,一般一篇好的文章要整理个三四天,但是,时间越来越紧张,后续的一些算法可能就以随记的方式,把实现过程的一些比较容易出错和有价值的细节 ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- 数字图像处理之sobel边缘检测
在前两部文章介绍了几种边缘检测算法,和位图的内存结构.如果对前两篇文章已经理解透彻 了,那么本文将带你进入数字图像处理的世界. 本文通过C代码实现基本的sobel边缘检测,包括8个方向和垂直方向: 代 ...
随机推荐
- Life is Strange:《奇异人生》
“生活就是一个陌生人”
- c++并发编程之进程创建(给那些想知道细节的人)
关于多进程创建,此处只讲解一个函数fork(). 1.进程创建 先上代码: #include"iostream" #include<unistd.h> //unix标准 ...
- 请求筛选模块被配置为拒绝包含双重转义序列的请求(.net core程序的‘web.config’调整)
之前项目有一个静态文件特殊字符转义的报错(+变为 %2B),老是显示404 请求筛选模块被配置为拒绝包含双重转义序列的请求 .网上的大多数解决方案都是一下: https://www.cnblogs ...
- Java输入和输出数组(加逗号)
输入示例 61,2,3,4,5,6 输出示例 1,2,3,4,5,61,2,3,4,5,6 import java.util.Scanner; public class Demo01 { public ...
- Miller_Rabin()算法素数判定 +ollard_rho 算法进行质因数分解
//****************************************************************// Miller_Rabin 算法进行素数测试//速度快,而且可以 ...
- 高数(求x的n次方的导数)
- vue报错There are multiple modules with names that only differ in casing. This can lead to unexpected behavior when compiling on a filesystem with other case-semantic. Use equal casing. Compare these mod
今天在开发一个新项目时,当安装完依赖包启动项目后报了一个这个错 There are multiple modules with names that only differ in casing.Thi ...
- JavaScript 中的构造函数
典型的面向对象编程语言(比如C++和Java),存在“类”(class)这个概念.所谓“类”就是对象的模板,对象就是“类”的实例.但是,在JavaScript语言的对象体系,不是基于“类”的,而是基于 ...
- [转]从实例谈OOP、工厂模式和重构
有了翅膀才能飞,欠缺灵活的代码就象冻坏了翅膀的鸟儿.不能飞翔,就少了几许灵动的气韵.我们需要给代码带去温暖的阳光,让僵冷的翅膀重新飞起来.结合实例,通过应用OOP.设计模式和重构,你会看到代码是怎样一 ...
- Leetcode Week1 Regular Expression Matching
Question Given an input string (s) and a pattern (p), implement regular expression matching with sup ...