电机AB相编码器测速
控制任务
检测编码器的脉冲并测速
电路设计

图1 直流电机带减速器和编码器
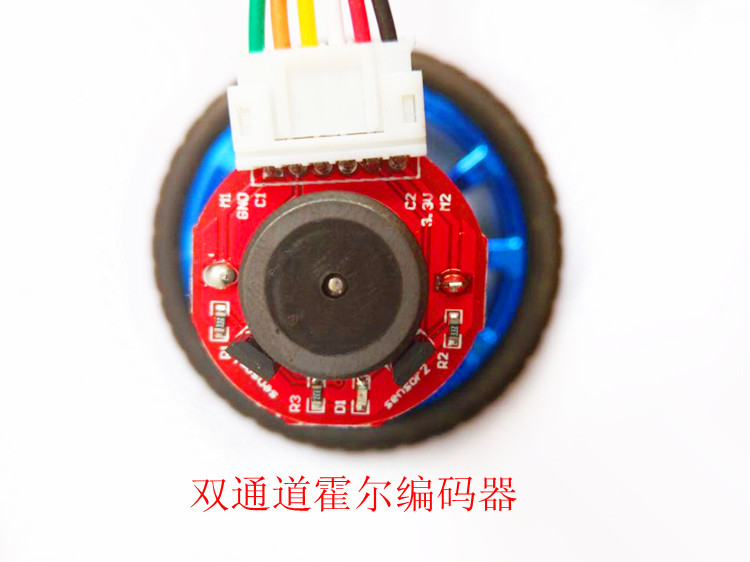
图2 编码器接线定义
编码器接线定义如下
M1:电机电源接口,绿色的
GND:编码器电源负极输入口,橙色的
C1:编码器A相输出,黄色的,接Arduino控制板2号引脚
C2:编码器B相输出,白色的,接Arduino控制板3号引脚
3.3V:编码器电源正极输入口(兼容3.3V、5V),红色的
M2:电机电源接口,黑色的,
程序设计
1 int motor_c_ENA=6; //控制板与驱动板的引脚连接
2 int motor_c_IN1=8;
3 int motor_c_IN2=7;
4
5 #define ENCODER_A_PIN 2 //编码器A相接控制板2号引脚,对应0号外部中断
6 #define ENCODER_B_PIN 3 //编码器B相接控制板3号引脚,
7 long pulse_number=0; // 脉冲计数
8 int rpm;
9
10 #include <MsTimer2.h> //定时器库的头文件
11
12 void setup()
13 {
14 pinMode(motor_c_ENA,OUTPUT); //电机C使能和PWM调速口
15 pinMode(motor_c_IN1,OUTPUT); //电机C控制口
16 pinMode(motor_c_IN2,OUTPUT); //电机C控制口
17
18 MsTimer2::set(500, send); // 中断设置函数,每 500ms 进入一次中断
19 MsTimer2::start(); //开始计时
20
21 pinMode(ENCODER_A_PIN, INPUT);
22 pinMode(ENCODER_B_PIN, INPUT);
23 attachInterrupt(0, read_quadrature, FALLING); //EN_A脚下降沿触发中断
24 Serial.begin(9600); //初始化Arduino串口
25 }
26
27 void loop()
28 {
29 //C加速正转
30 digitalWrite(motor_c_IN1,0);
31 digitalWrite(motor_c_IN2,1);
32 for (int a=100;a<=255;a++)
33 {
34 analogWrite(motor_c_ENA,a);
35 delay(200);
36 }
37
38 //C减速正转
39 digitalWrite(motor_c_IN1,0);
40 digitalWrite(motor_c_IN2,1);
41 for (int a=255;a>0;a--)
42 {
43 analogWrite(motor_c_ENA,a);
44 delay(200);
45 }
46 }
47
48 void send() //速度串行传送
49 {
50 rpm=int(pulse_number/37.4);
51 //编码器精度为224线,减速器减速比为1:20,故系数=(224/(60/0.5))*20=37.4
52 Serial.print("rpm: ");
53 Serial.println(rpm, DEC);
54 pulse_number = 0;
55 }
56
57 void read_quadrature() //编码器脉冲计数中断函数
58 {
59 if (digitalRead(ENCODER_A_PIN) == LOW)
60 {
61 if (digitalRead(ENCODER_B_PIN) == LOW) // 查询EN_B的电平以确认正转
62 { pulse_number ++; }
63 if (digitalRead(ENCODER_B_PIN) == HIGH) // 查询EN_B的电平以确认反转
64 { pulse_number --; }
65 }
66 }
电机AB相编码器测速的更多相关文章
- 通过电机编码器AB相输出确定电机转向
AB相输出相差90度,即当A相"正跳变"时如果B相是高电平那么是"正转",反之是"反转" 图片: 正转 反转 #include <Ti ...
- 伺服驱动器UVW电机电源线相序错误
我们有必要先了解此讨论的前提:编码器初始安装相位正确.伺服驱动器将全然"採信"电机编码器的初始安装相位所表征的电机电角度相位,无需在伺服电机 的UVW动力线接线连接后进行额外 ...
- stm32直流电机驱动与测速代码配套视频资料
说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了这些大家都懂要不然也不会学习s ...
- 不可错过的stm32单片机直流电机驱动与测速详解
stm32直流电机驱动与测速 说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了 ...
- 轻松掌握stm32直流电机驱动与测速
说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了这些大家都懂要不然也不会学习s ...
- stm32直流电机驱动与测速
stm32直流电机驱动与测速 说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了 ...
- [ Arch Linux ] Arch更新源高速源整理之测速并自动排序高速源 加快更新效率
方法一: 工具:rankmirrors 0x01 备份原来的源,并创建一个测试源 cd /etc/pacman.d cp mirrorlist mirrorlist.bakcp mirrorlist ...
- C# Ping的例子,可用于测试网络,延迟xx毫秒 C#编写网站测速
C#编写网站测速 WebClient wcl = new WebClient(); Stopwatch spwatch = new Stopwatch(); spwatch.Start(); byte ...
- linux测速软件speedtest-cli
linux测速软件: https://github.com/sivel/speedtest-cli 以下是我在gentoo上测的
随机推荐
- laravel封装方法在blade视图中使用
我这里使用的是Laravel7版本(本人只用过7 这里应该和5差别不大吧....) 首先需要在app/Providers/AppServiceProviders.php下的boot方法进行设置 示例: ...
- 【JAVA】给大家推荐一道有意思的java测试题。你知道答案吗?
作者:程序员小冰,CSDN博客:http://blog.csdn.net/qq_21376985, QQ986945193 公众号:程序员小冰 public class Test { /** * * ...
- 搭建好lnmp后,使用浏览器访问,出现404 Not Found
出现404 Not Found的原因是nginx指向页面不存在,编辑nginx配置文件,修改nginx指向页面路径 root html; 修改为 root /usr/share/nginx/html; ...
- 我竟然才知道slf4j里还有个MDC
大家好久不见,我是walking.今天给大家带来一个日志方面的知识——MDC,不知道大家认识不,反正我是最近刚知道的 初见MDC 前两天看项目中的代码,无意中看到一个自定义的线程池 MDCThread ...
- wpf之DataGrid绑定DataTable,其中DataGridComboBoxColumn双向绑定枚举enum
百度了快一天,没结果,除了几个原创的,都是复制粘贴的内容. 不想用别的笨办法,于是脑洞大开,想出了我的办法. 首先是前台代码,与网上的比较类似: xmlns:jz="clr-namespac ...
- jQuery 如何实现 模糊搜索
如何实现 模糊搜索 当我们浏览网页的时候,通常能看到搜索栏,这大大的提高了我们获取数据的目的性.那如何去实现一个简单的模糊搜索 框呢,以下案例获取能给你一点思路. 以下案例,可以实现当按键按下时,自动 ...
- Agumater 增加基本数据上传下载能力
- React和Vue的异同
Vue和React是时下比较受欢迎的三巨头之二,对Angular不慎了解,就不在赘述. React是由Facebook开发的一个js ui框架,其最大的变化就是VirtualDOM和新语法JSX vu ...
- WIN10自动修复失败无限循环
网上解决方案大部分都是要重置电脑或者进pe修复系统,手头没有启动盘又不想重置电脑的可以照下边的操作试一试 1.先暂时禁用自动修复功能cmd管理员(winre可以进cmd)执行bcdedit bcded ...
- defer implement for C/C++ using GCC/Clang extension
前述: go 中defer 给出了一种,延时调用的方式来释放资源.但是对于C/C++去没有内置的这种属性.对于经常手动管理内存的C/C++有其是C程序员这种特性显得无比重要.这里给出了一种基于GCC/ ...