ZYNQ的Linux Linaro系统镜像制作SD卡启动
ZYNQ的Linux Linaro系统镜像制作SD卡启动
0. 概述
ZYNQ生成uboot的时候和正常的ARM设备不太一样,ZYNQ属于二次辅助启动uboot然后由uboot启动内核,大概意思就是 ZYNQ内部有一个机制,该机制不可修改,可以通过拨码开关控制启动方式,比如从SD卡启动还是从QSPI启动,SD卡中要包含uboot的镜像信息。最大的不同就是,uboot编译完还不可以直接使用,还需要使用Vivado设计PL,再用SDK将uboot和设计PL的文件进行合成,最终合成后的文件拷贝到SD卡,由其启动。
我不会FPGA,本文也只概述在Linux端,SD卡如何做,如何制作一个全新的Linux系统。
映像文件BOOT.BIN一般包括:FSBL,Bitstream和SSBL这三个文件,其中Bitstream是配置PL端程序,是可选项,在我们制作Linaro系统的时候并不需要。FSBL是first stage boot loader,文件的制作需要使用Vivado环境;SSBL是Second Stage Boot Loader,这里使用的是Xilinx公司提供的u-boot。
来自参考文献1
1. 环境和材料
1.1 开发环境
软件环境:Vivado 2017.02 Linux版本
系统环境:Ubuntu 16.04 amd64
交叉编译器: gcc-linaro-7.3-2018.05.tar.xz
我的交叉编译环境放在/opt/toolschain/linaro/bin/arm-linux-gnueabihf-下,我编译的时候喜欢指定绝对编译器路径
1.2 准备材料
- ARM端的linux内核源码:https://github.com/Xilinx/linux-xlnx
- ARM端的uboot源代码:https://github.com/Xilinx/u-boot-xlnx
- ARM端的Linaro文件系统:https://releases.linaro.org/archive/12.07/ubuntu/precise-images/ubuntu-desktop/linaro-precise-ubuntu-desktop-20120723-305.tar.gz (我用的是ubuntu 12.07)
2. 制作uboot
2.1 编译uboot
获取xilinx的uboot源码:
git clone https://github.com/Xilinx/u-boot-xlnx.git清除编译:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm clean配置板级信息:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm zynq_zc702_defconfig板级信息在如图所示位置,我的是zc701的板子,但是没有,我就选择一个和这个最相近的。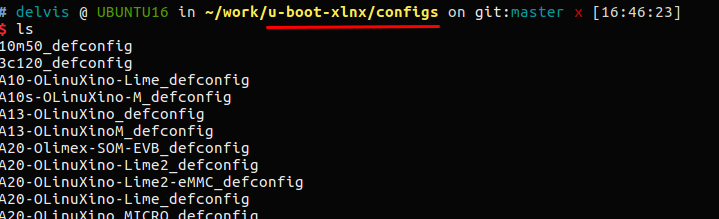
menuconfig写入配置信息:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm menuconfig编译uboot:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm -j8编译成功后生产的是uboot,所以需要重命名uboot:
mv uboot uboot.elf
拿到uboot.elf后,留存备用,再合成最终的boot程序需要这个uboot.elf文件。
2.2 FSBL、bit文件的制作
大体流程就是:用Vivado这个软件新建工程,然后添加ip设计,配置时钟、配置一些Linux需要的基本外设(SD卡卡、串口、以太网等),使用wrap HDL功能生成顶层设计.v文件,然后编译.v文件生成.bit文件,再生成硬件描述文件,launch SDK软件,会自动生成一个工程,编译后拿到fsbl文件。
具体过程很多博友都已经写的很清楚了,我这里贴出一个讲的比较好的,可以按照这个方法做:在未来的多核通信机制里面,PS和PL的通信,则PL文件就是这样设计好之后然后我们重新合成uboot文件。
https://blog.csdn.net/long_fly/article/details/78643258
我们通过这样的方式拿到vivado编译生成的bit文件,并且在SDK里面建立了工程,生成了一个硬件平台,接下来我们获取fsbl这个文件。fsbl文件需要在SDK里面建立一个FSBL工程,并且基于刚才我们生成的硬件平台。
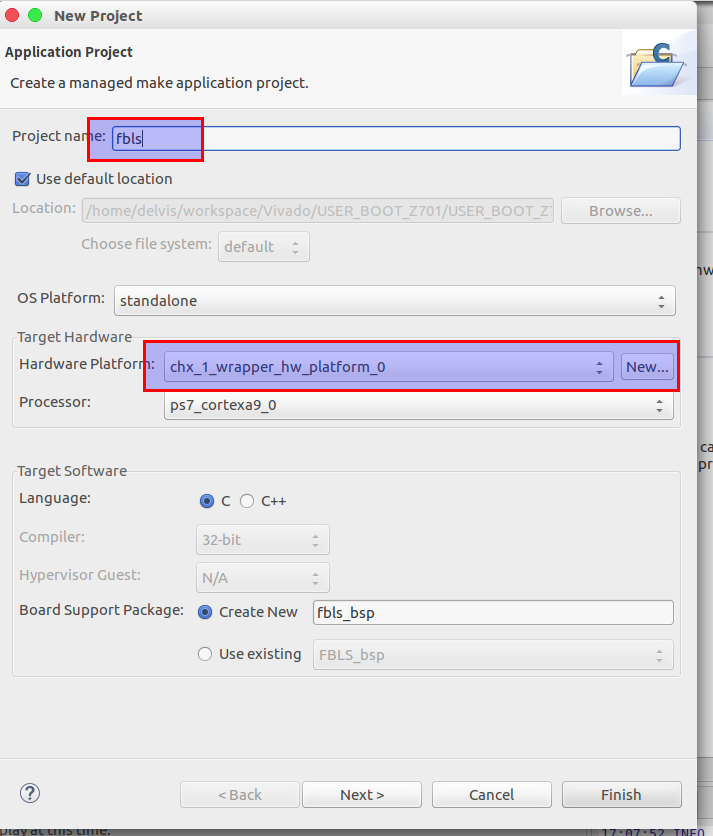
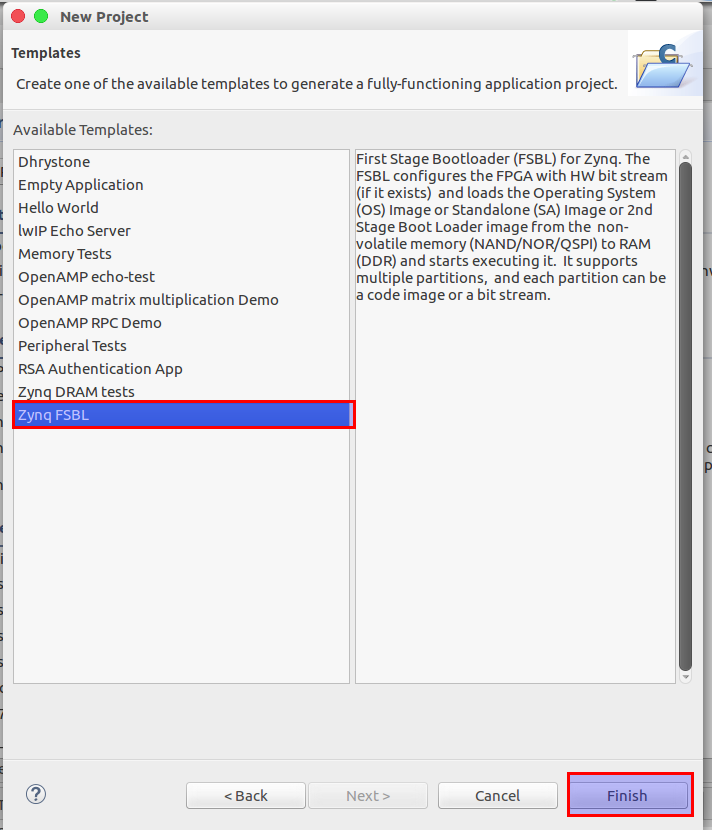
建立完之后直接编译,就可以拿到fsbl文件。
到目前位置,拿到了:
- vivado编译生成的:bit文件
- sdk生成的:fsbl文件
- 刚刚编译uboot生成的:uboot.elf文件
可以开始合成BOOT.bin文件了
2.3 合成BOOT.bin
这个操作还是在sdk软件里面进行。
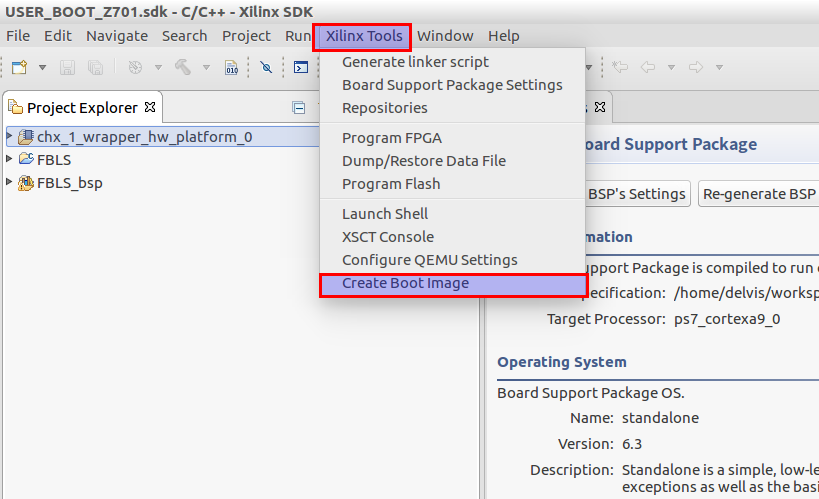
使用create boot image功能:
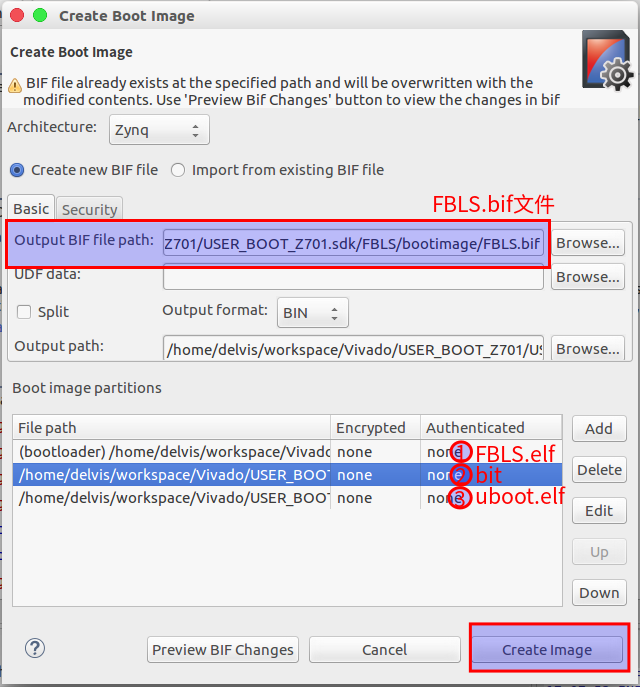
到此完成BOOT.bin的合成。
2.4 文件权限(仅限Linux开发用户)
还有一个非常重要的事情,我试了很多次,zynq平台就是不启动,uboot也不输出任何的信息。这个小小的问题卡了我很久,不过在今天早上洗漱的时候,突然想到,Xilinx Vivado和SDK都是在root情况下启动,生成BOOT.bin也是可能有权限问题。所以....
我拿到板子,然后在SD卡里面,给定sudo chmod 777 BOOT.bin 然后弹出SD卡,把SD放在ZYNQ上,居然成功启动了。如果你是在Linux系统下,不要忘记给定BOOT.bin权限。
3 Linux内核制作
3.1 Linux内核编译出uImage文件
- 获取Linux内核:
git clone https://github.com/Xilinx/linux-xlnx.git - 切换到Linux内核源码目录,开始清理内核:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm clean - 配置板级信息:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm xilinx_zynq_defconfig - 使用menuconfig写入.config文件:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm menuconfig进来之后退出就行。 - 编译内核:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm -j8 - 制作uImage文件:
make CROSS_COMPILE=/opt/toolschain/linaro/bin/arm-linux-gnueabihf- ARCH=arm uImage LOADADDR=0x00008000 - 编译完成后,在linux-xlnx/arch/arm/boot的uImage文件留着备用。
3.2 制作设备树文件
在linux-xlnx/arch/arm/boot/dts目录内新建zynq-7010.dts文件,文件内容:
/dts-v1/;
/include/ "zynq-7000.dtsi"
/ {
model = "HLF";
compatible = "ALINX,zynq", "xlnx,zynq-7000";
aliases {
ethernet0 = &gem0;
serial0 = &uart1;
spi0 = &qspi;
mmc0 = &sdhci0;
};
memory@0 {
device_type = "memory";
reg = <0x0 0x20000000>;
};
chosen {
bootargs = "";
stdout-path = "serial0:115200n8";
};
usb_phy0: phy0 {
compatible = "usb-nop-xceiv";
#phy-cells = <0>;
reset-gpios = <&gpio0 46 1>;
};
};
&clkc {
ps-clk-frequency = <50000000>;
};
&gem0 {
status = "okay";
phy-mode = "rgmii-id";
phy-handle = <ðernet_phy>;
ethernet_phy: ethernet-phy@0 {
reg = <0>;
};
};
&qspi {
u-boot,dm-pre-reloc;
status = "okay";
};
切换到内核的主目录里面:./scripts/dtc/dtc -I dts -O dtb -o ./arch/arm/boot/devicetree.dtb ./arch/arm/boot/dts/zynq-7010.dts
然后在linux-xlnx/arch/arm/boot/目录下即可发现devicetree.dtb文件,同样留着备用。
3.3 启动配置文件制作uEnv.txt
随便找个位置新建一个uEnv.txt 文件,文件内写入boot的配置信息:
uenvcmd=run linaro_sdboot
linaro_sdboot=echo Copying Linux from SD to RAM... && \
fatload mmc 0 0x3000000 ${kernel_image} && \
fatload mmc 0 0x2A00000 ${devicetree_image} && \
if fatload mmc 0 0x2000000 ${ramdisk_image}; \
then bootm 0x3000000 0x2000000 0x2A00000; \
else bootm 0x3000000 - 0x2A00000; fi
bootargs=console=ttyPS0,115200 root=/dev/mmcblk0p2 rw earlyprintk rootfstype=ext4 rootwait
保存,留着备用。
4 SD卡制作
准备一张空白的超过8G的SD卡,读卡器读取该卡,我们使用Linux系统进行格式化,Windows用户可以通过diskgen等格式化分区的软件制作也好。
查看SD卡格式化分区:
sudo fdisk -l假如查看到的SD卡是/dev/sde分区,(不要格式化错了,在我年轻的时候我曾经把整个硬盘都格式化了,很危险的操作,看清楚是/dev/sd* 后面是c 还是d还是e还是f)。进入分区管理:
sudo fdisk /dev/sde以下步骤按照这个OMAPL138制作SD卡启动盘及重装Linux系统,我的这个博客来。注意不同的是,我们建立启动分区的大小是100M即可,创建boot的分区的类型也为Linux。
然后格式化boot分区:
sudo mkfs.vfat -F 32 -n "boot" /dev/sde1格式化rootfs分区:
sudo mkfs.ext4 -L "rootfs" /dev/sde2到此我们完成了SD卡制作。
5 烧写SD启动卡
sd卡的boot分区:使用命令将 BOOT.bin / devicetree.dtb / uImage / uEnv.txt 四个文件拷贝到boot分区。
解压Linaro的文件系统: 在第一章写的 ARM端的Linaro文件系统:linaro-precise-ubuntu-desktop-20120723-305.tar.gz 解压到SD卡的root分区
sudo tar --strip-components=3 -C /media/delvis/rootfs -xzpf linaro-precise-ubuntu-desktop-20120723-305.tar.gz binary/boot/filesystem.dir最好找一个带知识灯的读卡器,解压命令执行完了,不代表SD卡写入完毕,如果有指示灯,指示灯不闪烁之后弹出SD卡。
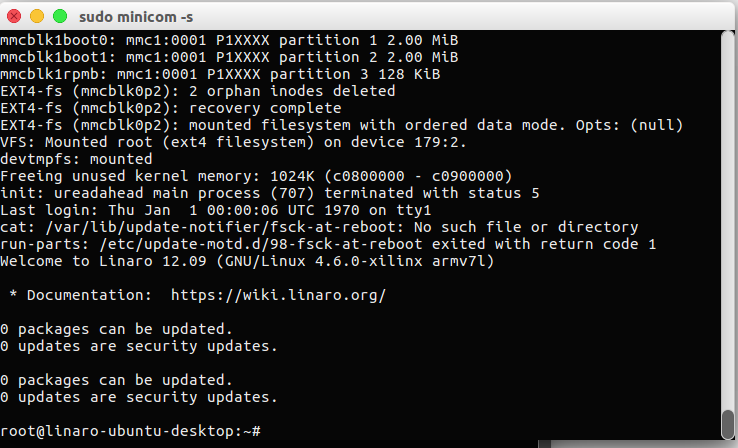
到此,一个完整的Linaro系统就写入了SD卡,将FPGA板子的boot拨码开关拨到SD卡启动位置,就可以看到Linaro系统启动了。
参考文献:
[1] long_fly, ZYNQ跑系统 系列(一) 传统方式移植linux, 2017年11月28日
[2] 雅可, Zedboard上运行Linaro系统(二):生成BOOT.BIN, 2016年07月26日
[3] 带你高飞, 03-ZYNQ学习(启动篇)之程序的固化, 2018年05月22日
ZYNQ的Linux Linaro系统镜像制作SD卡启动的更多相关文章
- ZYNQ的Linux Linaro系统镜像制作SD卡启动(仅使用mkfs部分,其他部分待看)
0. 概述 ZYNQ生成uboot的时候和正常的ARM设备不太一样,ZYNQ属于二次辅助启动uboot然后由uboot启动内核,大概意思就是 ZYNQ内部有一个机制,该机制不可修改,可以通过拨码开关控 ...
- OMAPL138制作SD卡启动介质及重装Linux系统
OMAPL138制作SD卡启动盘及重装Linux系统 手里的创龙的OMAPL138平台的系统SSH坏掉了,我重新移植了openssh还是不好使,没有办法了只能重装OMAPL138的系统了,按照创龙给的 ...
- Samsung_tiny4412(驱动笔记01)----linux 3.5,U-Boot,Busybox,SD卡启动环境搭建
/*********************************************************************************** * * linux 3.5,U ...
- [i.MX6q]i.MX6q处理器,linux操作系统平台搭建 从SD卡启动系统
转自:http://www.07net01.com/linux/2016/02/1232094.html 参照1:http://blog.csdn.net/girlkoo/article/detail ...
- 制作SD卡启动自己编译的uboot.bin
README for FriendlyARM Tiny4412 -----------------------------------------------------1. Build uboot ...
- raspberry 烧写镜像到SD卡
刚开始接触树莓派,需要烧写系统镜像到SD卡,网上找了些资料,记录于此. raspberry镜像下载: https://www.raspberrypi.org/downloads/ 烧写工具: wid3 ...
- Linux命令行烧录树莓派镜像至SD卡
首先下载镜像压缩包 验证压缩包的未被串改 1 sha1sum 2013-09-25-wheezy-raspbian.zip 对此命令的输出结果和官网给出的SHA-1 Checksum进行比对,如果一致 ...
- Exynos4412从SD卡启动的简单网络文件系统制作
Exynos4412从SD卡启动的简单网络文件系统制作 1. 简介 嵌入式系统能够在开发板上正常运行,需要先进行系统配置,一个完整的嵌入式系统应该包含的几个部分::uboot,kernel,rootf ...
- 用QEMU模拟运行uboot从SD卡启动Linux
平台:Qemu + vexpress-a9 u-boot:u-boot-2019.10 Linux:linux-4.14.13 之前介绍过用Qemu模拟运行uboot,然后从网络启动lin ...
随机推荐
- MySQL案例之Timestamp和Datetime
mysql数据库常用的时间类型有timestamp和datetime,两者主要区别是占用存储空间长度不一致.可存储的时间也有限制,但针对不同版本下,timestamp字段类型的设置需要慎重,因为不注意 ...
- 体验SpringBoot
体验SpringBoot 1.介绍 Spring Boot是由Pivotal团队提供的全新框架,其设计目的是用来简化新Spring应用的初始搭建以及开发过程.该框架使用了特定的方式来进行配置,从而使开 ...
- java时间操作工具类
import java.sql.Timestamp;import java.text.DateFormat;import java.text.ParseException;import java.te ...
- 我的第一个Python随笔
自学Python也很长时间了,注册博客园写了第一篇随笔.之前想过很多次,但是始终不知道该怎么开始,内容如何,现在想想,随笔嘛,是自己的想法,也自己的实践,又是自己的锻炼.话不多说,开始今天的正式内容. ...
- API代理网关和OAuth2.0授权认证框架
API代理网关和OAuth2.0授权认证框架 https://www.cnblogs.com/bluedoctor/p/8967951.html 1,授权认证与微服务架构 1.1,由不同团队合作引发的 ...
- 树莓派(Raspberry Pi)上手小记
引言 本日志中有不少软广告,博主并没有收他们任何好处,完全是给想入手的小伙伴们指条路而已.不喜勿看,不喜勿闻,不喜勿喷. 介绍 之前两三个月突然听说了这么个东西,也没有留意,某天突然在一个微信公众号上 ...
- 【C++】随机重命名MP3文件
新置MP3一件,竟然没有随机播放的功能.坑啊!身为程序媛一枚,自己动手吧~ 获取当前路径: char buf[1000]; GetCurrentDirectory(1000,buf); string ...
- CentOS查看线程、硬盘、内存、cpu、网卡
1.查看硬盘 [mushme@investide ~]$ df -ah 2.查看内存 [mushme@investide ~]$ free -m 3.监控系统的负载 w 查看当前系统的负载,详细 ...
- git init新建仓库并上传到远端
git init git add README.md git commit -m "first commit" git remote add origin https://gith ...
- java中StringBuffer与String、StringBuilder的区别
在java中我们经常可以看到StringBuffer和String的用法,但是我自己在使用过程中,经常会将两者弄混淆,今天我们就来了解一下两者的区别: 我们首先来看一下我们的官方API中的简单介绍: ...