CUDA ---- Warp解析
Warp
逻辑上,所有thread是并行的,但是,从硬件的角度来说,实际上并不是所有的thread能够在同一时刻执行,接下来我们将解释有关warp的一些本质。
Warps and Thread Blocks
warp是SM的基本执行单元。一个warp包含32个并行thread,这32个thread执行于SMIT模式。也就是说所有thread执行同一条指令,并且每个thread会使用各自的data执行该指令。
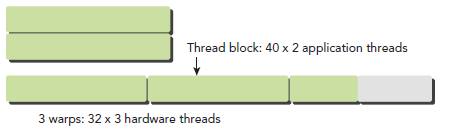
block可以是一维二维或者三维的,但是,从硬件角度看,所有的thread都被组织成一维,每个thread都有个唯一的ID(ID的计算可以在之前的博文查看)。
每个block的warp数量可以由下面的公式计算获得:
一个warp中的线程必然在同一个block中,如果block所含线程数目不是warp大小的整数倍,那么多出的那些thread所在的warp中,会剩余一些inactive的thread,也就是说,即使凑不够warp整数倍的thread,硬件也会为warp凑足,只不过那些thread是inactive状态,需要注意的是,即使这部分thread是inactive的,也会消耗SM资源。
Warp Divergence
控制流语句普遍存在于各种编程语言中,GPU支持传统的,C-style,显式控制流结构,例如if…else,for,while等等。
CPU有复杂的硬件设计可以很好的做分支预测,即预测应用程序会走哪个path。如果预测正确,那么CPU只会有很小的消耗。和CPU对比来说,GPU就没那么复杂的分支预测了(CPU和GPU这方面的差异的原因不是我们关心的,了解就好,我们关心的是由这差异引起的问题)。
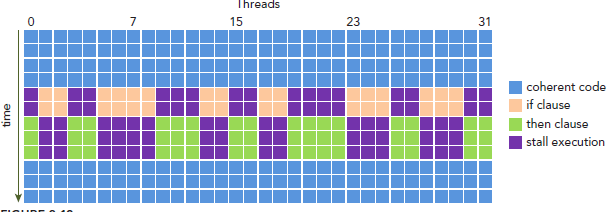
这样我们的问题就来了,因为所有同一个warp中的thread必须执行相同的指令,那么如果这些线程在遇到控制流语句时,如果进入不同的分支,那么同一时刻除了正在执行的分之外,其余分支都被阻塞了,十分影响性能。这类问题就是warp divergence。
请注意,warp divergence问题只会发生在同一个warp中。
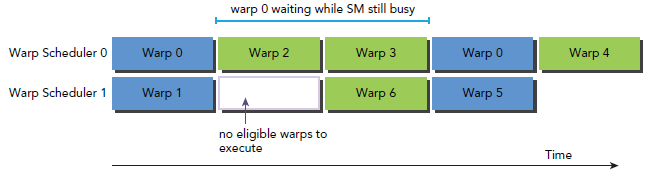
下图展示了warp divergence问题:
为了获得最好的性能,就需要避免同一个warp存在不同的执行路径。避免该问题的方法很多,比如这样一个情形,假设有两个分支,分支的决定条件是thread的唯一ID的奇偶性:
__global__ void mathKernel1(float *c) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
float a, b;
a = b = 0.0f;
if (tid % == ) {
a = 100.0f;
} else {
b = 200.0f;
}
c[tid] = a + b;
}
一种方法是,将条件改为以warp大小为步调,然后取奇偶,如下:
__global__ void mathKernel2(void) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
float a, b;
a = b = 0.0f;
if ((tid / warpSize) % == ) {
a = 100.0f;
} else {
b = 200.0f;
}
c[tid] = a + b;
}
代码:
int main(int argc, char **argv) {
// set up device
int dev = ;
cudaDeviceProp deviceProp;
cudaGetDeviceProperties(&deviceProp, dev);
printf("%s using Device %d: %s\n", argv[],dev, deviceProp.name);
// set up data size
int size = ;
int blocksize = ;
if(argc > ) blocksize = atoi(argv[]);
if(argc > ) size = atoi(argv[]);
printf("Data size %d ", size);
// set up execution configuration
dim3 block (blocksize,);
dim3 grid ((size+block.x-)/block.x,);
printf("Execution Configure (block %d grid %d)\n",block.x, grid.x);
// allocate gpu memory
float *d_C;
size_t nBytes = size * sizeof(float);
cudaMalloc((float**)&d_C, nBytes);
// run a warmup kernel to remove overhead
size_t iStart,iElaps;
cudaDeviceSynchronize();
iStart = seconds();
warmingup<<<grid, block>>> (d_C);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
printf("warmup <<< %4d %4d >>> elapsed %d sec \n",grid.x,block.x, iElaps );
// run kernel 1
iStart = seconds();
mathKernel1<<<grid, block>>>(d_C);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
printf("mathKernel1 <<< %4d %4d >>> elapsed %d sec \n",grid.x,block.x,iElaps );
// run kernel 3
iStart = seconds();
mathKernel2<<<grid, block>>>(d_C);
cudaDeviceSynchronize();
iElaps = seconds () - iStart;
printf("mathKernel2 <<< %4d %4d >>> elapsed %d sec \n",grid.x,block.x,iElaps );
// run kernel 3
iStart = seconds ();
mathKernel3<<<grid, block>>>(d_C);
cudaDeviceSynchronize();
iElaps = seconds () - iStart;
printf("mathKernel3 <<< %4d %4d >>> elapsed %d sec \n",grid.x,block.x,iElaps);
// run kernel 4
iStart = seconds ();
mathKernel4<<<grid, block>>>(d_C);
cudaDeviceSynchronize();
iElaps = seconds () - iStart;
printf("mathKernel4 <<< %4d %4d >>> elapsed %d sec \n",grid.x,block.x,iElaps);
// free gpu memory and reset divece
cudaFree(d_C);
cudaDeviceReset();
return EXIT_SUCCESS;
}
编译运行:
$ nvcc -O3 -arch=sm_20 simpleDivergence.cu -o simpleDivergence
$./simpleDivergence
输出:
$ ./simpleDivergence using Device : Tesla M2070
Data size Execution Configuration (block grid )
Warmingup elapsed 0.000040 sec
mathKernel1 elapsed 0.000016 sec
mathKernel2 elapsed 0.000014 sec
我们也可以直接使用nvprof(之后会详细介绍)这个工具来度量性能:
$ nvprof --metrics branch_efficiency ./simpleDivergence
输出为:
Kernel: mathKernel1(void)
branch_efficiency Branch Efficiency 100.00% 100.00% 100.00%
Kernel: mathKernel2(void)
branch_efficiency Branch Efficiency 100.00% 100.00% 100.00%
Branch Efficiency的定义如下:

到这里你应该在奇怪为什么二者表现相同呢,实际上当我们的代码很简单,可以被预测时,CUDA的编译器会自动帮助优化我们的代码。稍微提一下GPU分支预测(理解的有点晕,不过了解下就好),这里,一个被称为预测变量的东西会被设置成1或者0,所有分支都会得到执行,但是只有预测值为1时,才会得到执行。当条件状态少于某一个阈值时,编译器会将一个分支指令替换为预测指令,因此,现在回到自动优化问题,一份较长的代码就会导致warp divergence了。
可以使用下面的命令强制编译器不优化(貌似不怎么管用):
$ nvcc -g -G -arch=sm_20 simpleDivergence.cu -o simpleDivergence
Resource Partitioning
一个warp的context包括以下三部分:
- Program counter
- Register
- Shared memory
再次重申,在同一个执行context中切换是没有消耗的,因为在整个warp的生命期内,SM处理的每个warp的执行context都是on-chip的。
每个SM有一个32位register集合放在register file中,还有固定数量的shared memory,这些资源都被thread瓜分了,由于资源是有限的,所以,如果thread比较多,那么每个thread占用资源就叫少,thread较少,占用资源就较多,这需要根据自己的要求作出一个平衡。
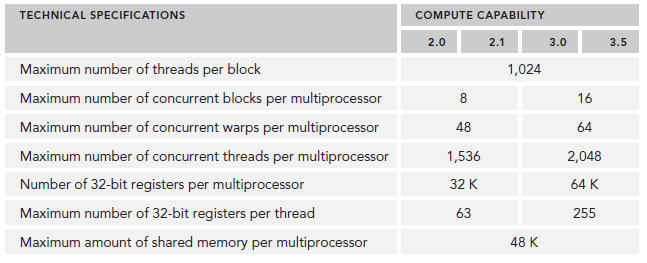
资源限制了驻留在SM中blcok的数量,不同的device,register和shared memory的数量也不同,就像之前介绍的Fermi和Kepler的差别。如果没有足够的资源,kernel的启动就会失败。
当一个block或得到足够的资源时,就成为active block。block中的warp就称为active warp。active warp又可以被分为下面三类:
- Selected warp
- Stalled warp
- Eligible warp
SM中warp调度器每个cycle会挑选active warp送去执行,一个被选中的warp称为selected warp,没被选中,但是已经做好准备被执行的称为Eligible warp,没准备好要执行的称为Stalled warp。warp适合执行需要满足下面两个条件:
- 32个CUDA core有空
- 所有当前指令的参数都准备就绪
例如,Kepler任何时刻的active warp数目必须少于或等于64个(GPU架构篇有介绍)。selected warp数目必须小于或等于4个(因为scheduler有4个?不确定,至于4个是不是太少则不用担心,kernel启动前,会有一个warmup操作,可以使用cudaFree()来实现)。如果一个warp阻塞了,调度器会挑选一个Eligible warp准备去执行。
CUDA编程中应该重视对计算资源的分配:这些资源限制了active warp的数量。因此,我们必须掌握硬件的一些限制,为了最大化GPU利用率,我们必须最大化active warp的数目。
Latency Hiding
指令从开始到结束消耗的clock cycle称为指令的latency。当每个cycle都有eligible warp被调度时,计算资源就会得到充分利用,基于此,我们就可以将每个指令的latency隐藏于issue其它warp的指令的过程中。
和CPU编程相比,latency hiding对GPU非常重要。CPU cores被设计成可以最小化一到两个thread的latency,但是GPU的thread数目可不是一个两个那么简单。
当涉及到指令latency时,指令可以被区分为下面两种:
- Arithmetic instruction
- Memory instruction
顾名思义,Arithmetic instruction latency是一个算数操作的始末间隔。另一个则是指load或store的始末间隔。二者的latency大约为:
- 10-20 cycle for arithmetic operations
- 400-800 cycles for global memory accesses
下图是一个简单的执行流程,当warp0阻塞时,执行其他的warp,当warp变为eligible时从新执行。
你可能想要知道怎样评估active warps 的数量来hide latency。Little’s Law可以提供一个合理的估计:

对于Arithmetic operations来说,并行性可以表达为用来hide Arithmetic latency的操作的数目。下表显示了Fermi和Kepler相关数据,这里是以(a + b * c)作为操作的例子。不同的算数指令,throughput(吞吐)也是不同的。
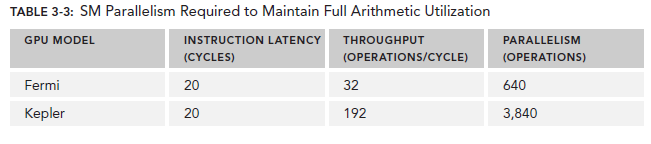
这里的throughput定义为每个SM每个cycle的操作数目。由于每个warp执行同一种指令,因此每个warp对应32个操作。所以,对于Fermi来说,每个SM需要640/32=20个warp来保持计算资源的充分利用。这也就意味着,arithmetic operations的并行性可以表达为操作的数目或者warp的数目。二者的关系也对应了两种方式来增加并行性:
- Instruction-level Parallelism(ILP):同一个thread中更多的独立指令
- Thread-level Parallelism (TLP):更多并发的eligible threads
对于Memory operations,并行性可以表达为每个cycle的byte数目。
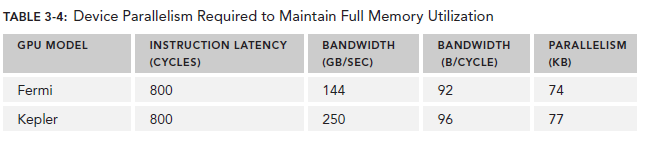
因为memory throughput总是以GB/Sec为单位,我们需要先作相应的转化。可以通过下面的指令来查看device的memory frequency:
$ nvidia-smi -a -q -d CLOCK | fgrep -A 3 "Max Clocks" | fgrep "Memory"
以Fermi为例,其memory frequency可能是1.566GHz,Kepler的是1.6GHz。那么转化过程为:

乘上这个92可以得到上图中的74,这里的数字是针对整个device的,而不是每个SM。
有了这些数据,我们可以做一些计算了,以Fermi为例,假设每个thread的任务是将一个float(4 bytes)类型的数据从global memory移至SM用来计算,你应该需要大约18500个thread,也就是579个warp来隐藏所有的memory latency。

Fermi有16个SM,所以每个SM需要579/16=36个warp来隐藏memory latency。
Occupancy
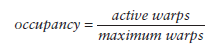
当一个warp阻塞了,SM会执行另一个eligible warp。理想情况是,每时每刻到保证cores被占用。Occupancy就是每个SM的active warp占最大warp数目的比例:
我们可以使用的device篇提到的方法来获取warp最大数目:
cudaError_t cudaGetDeviceProperties(struct cudaDeviceProp *prop, int device);
然后用maxThreadsPerMultiProcessor来获取具体数值。
grid和block的配置准则:
- 保证block中thrad数目是32的倍数。
- 避免block太小:每个blcok最少128或256个thread。
- 根据kernel需要的资源调整block。
- 保证block的数目远大于SM的数目。
- 多做实验来挖掘出最好的配置。
Occupancy专注于每个SM中可以并行的thread或者warp的数目。不管怎样,Occupancy不是唯一的性能指标,Occupancy达到当某个值是,再做优化就可能不在有效果了,还有许多其它的指标需要调节,我们会在之后的博文继续探讨。
Synchronize
同步是并行编程的一个普遍的问题。在CUDA的世界里,有两种方式实现同步:
- System-level:等待所有host和device的工作完成
- Block-level:等待device中block的所有thread执行到某个点
因为CUDA API和host代码是异步的,cudaDeviceSynchronize可以用来停住CUP等待CUDA中的操作完成:
cudaError_t cudaDeviceSynchronize(void);
因为block中的thread执行顺序不定,CUDA提供了一个function来同步block中的thread。
__device__ void __syncthreads(void);
当该函数被调用,block中的每个thread都会等待所有其他thread执行到某个点来实现同步。
CUDA ---- Warp解析的更多相关文章
- 【并行计算-CUDA开发】CUDA ---- Warp解析
Warp 逻辑上,所有thread是并行的,但是,从硬件的角度来说,实际上并不是所有的thread能够在同一时刻执行,接下来我们将解释有关warp的一些本质. Warps and Thread Blo ...
- cuda addressMode解析
cudaAddressModeClamp:超出范围就用边界值代替,示意: AA | ABCDE | EE cudaAddressModeBorder:超出范围就用零代替,示意: 00 | ABCDE ...
- cuda培训素材
http://www.geforce.cn/hardware/desktop-gpus/geforce-gtx-480/architecture http://cache.baiducontent.c ...
- CUDA ---- Branch Divergence and Unrolling Loop
Avoiding Branch Divergence 有时,控制流依赖于thread索引.同一个warp中,一个条件分支可能导致很差的性能.通过重新组织数据获取模式可以减少或避免warp diverg ...
- ubuntu18.04+ cuda9.0+opencv3.1+caffe-ssd安装
详细Ubuntu18.04,CUDA9.0,OpenCV3.1,Tensorflow完全配置指南 问题1:使用Cmake编译opencv源码 CMake Error: The following va ...
- 编写HSA内核
编写HSA内核 介绍 HSA提供类似于OpenCL的执行模型.指令由一组硬件线程并行执行.在某种程度上,这类似于 单指令多数据(SIMD)模型,但具有这样的便利:细粒度调度对于程序员而言是隐藏的,而不 ...
- CUDA性能优化----warp深度解析
本文转自:http://blog.163.com/wujiaxing009@126/blog/static/71988399201701224540201/ 1.引言 CUDA性能优化----sp, ...
- 【并行计算-CUDA开发】CUDA编程——GPU架构,由sp,sm,thread,block,grid,warp说起
掌握部分硬件知识,有助于程序员编写更好的CUDA程序,提升CUDA程序性能,本文目的是理清sp,sm,thread,block,grid,warp之间的关系.由于作者能力有限,难免有疏漏,恳请读者批评 ...
- 【并行计算-CUDA开发】warp是调度和执行的基本单位而harf-warp为存储器操作基本单位
1.在用vs运行cuda的一些例子时,在编译阶段会报出很多警告: warning C4819 ...... 解决这个警告的方法是打开出现warning的文件,Ctrl+A全选,然后在文件菜单:file ...
随机推荐
- 深入浅出的webpack4构建工具--webpack4+vue+vuex+mock模拟后台数据(十九)
mock的官网文档 mock官网 关于mockjs的优点,官网这样描述它:1)可以前后端分离.2)增加单元测试的真实性(通过随机数据,模拟各种场景).3)开发无侵入(不需要修改既有代码,就可以拦截 A ...
- python3.6小程序
# 查询类python 3.6 pycharm中运行(唔错) people = { '王飞': { '电话': '2341', '地址': '西方镇忘川村' }, '小瘪三': { '电话': '91 ...
- Saltstack学习之二:target与模块方法的运行
对象的管理 saltstack系统中我们的管理对象叫做target,在master上我们可以采用不同的target去管理不同的minion,这些target都是通过去管理和匹配minion的id来做的 ...
- mysql无法远程连接到数据库解决方法
ERROR 1130: Host ’xxx.xxx.xxx.xxx′ is not allowed to connect to this MySQL server这是告诉你没有权限连接指定IP的主机, ...
- USB协议枚举过程详解
一 枚举过程之文字描述 ?主机集线器监视着每个端口的信号电压,当有新设备接入时便可觉察.(集线器端口的两根信号线的每一根都有15kΩ的下拉电阻,而每一个设备在D+都有一个1.5kΩ的上拉电阻.当用US ...
- SQL Server CTE 递归查询全解(转载)
在TSQL脚本中,也能实现递归查询,SQL Server提供CTE(Common Table Expression),只需要编写少量的代码,就能实现递归查询,本文详细介绍CTE递归调用的特性和使用示例 ...
- Spring Boot 之订制 logo
Spring Boot 之订制 logo 简介 变量 配置 编程 源码 引申和引用 Spring Boot 启动时默认会显示以下 logo: . ____ _ __ _ _ /\\ / ___'_ _ ...
- C# 中堆与栈的浅记
C# 中堆与栈的浅记 什么是堆和栈? 简言之.堆和栈是驻留在内存中的区域,它们的作用是帮助我们运行代码.在.Net Framework 环境下,当我们的代码运行时,内存中的堆和栈便存储了这些代码,并包 ...
- linux系统原子操作
一.概念 原子操作提供了指令原子执行,中间没有中断.就像原子被认为是不可分割颗粒一样,原子操作(atomic operation)是不可分割的操作. c语言中一个变量的自加1操作,看起来很简 ...
- flask_admin 笔记七 扩展功能
高级功能 1,开启CSRF保护 要将CSRF保护添加到由ModelView实例生成的表单中,请通过指定form_base_class参数在ModelView子类中使用SecureForm类: from ...