【LeetCode动态规划#02】图解不同路径I + II(首次涉及二维dp数组,)
不同路径
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
示例 1:
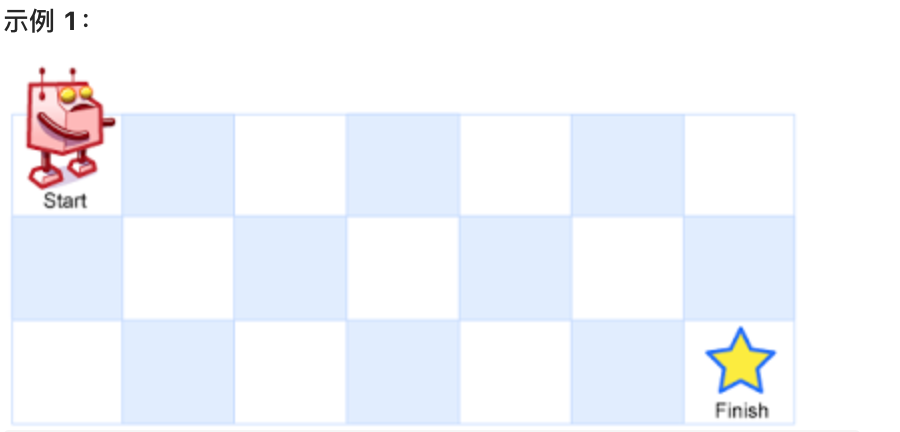
- 输入:m = 3, n = 7
- 输出:28
示例 2:
- 输入:m = 2, n = 3
- 输出:3
解释: 从左上角开始,总共有 3 条路径可以到达右下角。
- 向右 -> 向右 -> 向下
- 向右 -> 向下 -> 向右
- 向下 -> 向右 -> 向右
示例 3:
- 输入:m = 7, n = 3
- 输出:28
示例 4:
- 输入:m = 3, n = 3
- 输出:6
提示:
- 1 <= m, n <= 100
- 题目数据保证答案小于等于 2 * 10^9
思路
题意没什么好分析的,就是从起始点到终点有多少种走法
直接上五部曲分析
五步走
1、确定dp数组含义
从题干和所给示例可以得出
dp[i][j]:从[0] [0]出发走到[i] [j]有dp[i][j]种走法
2、确定递推公式

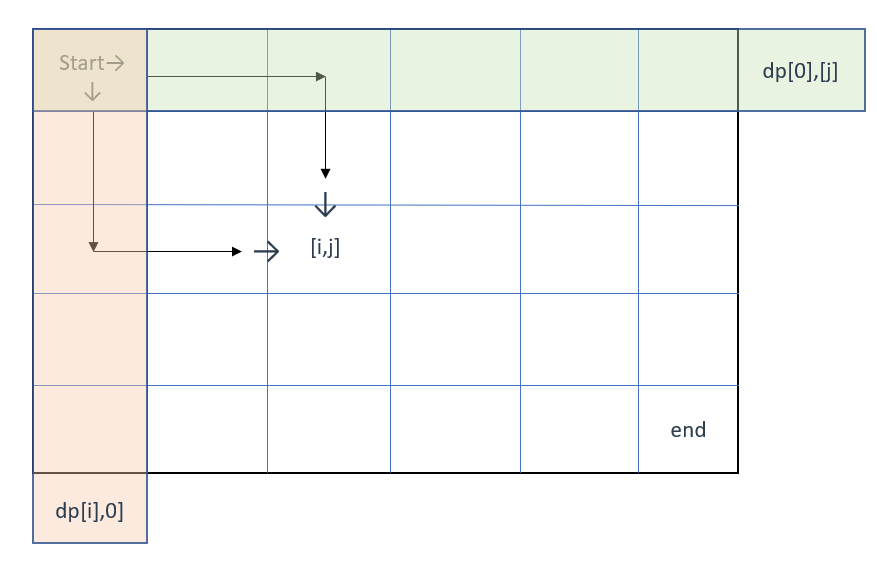
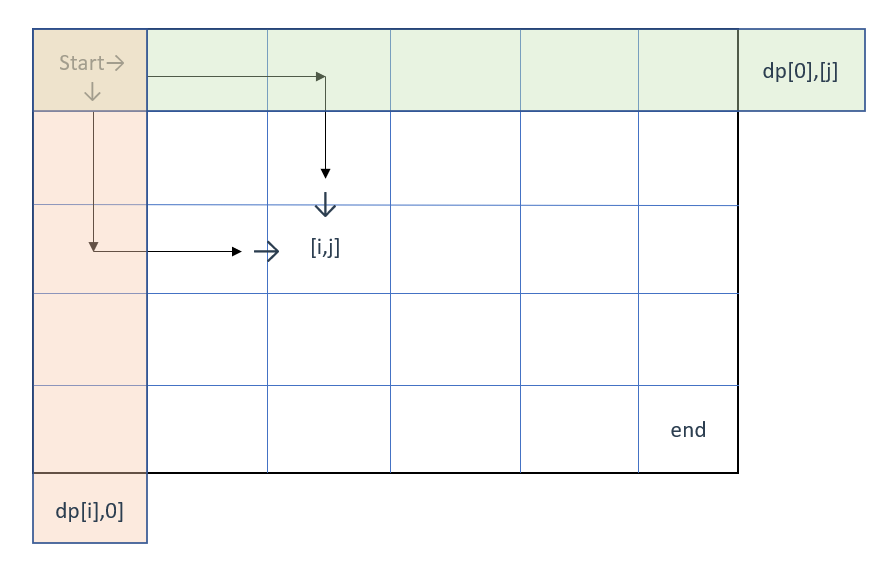
如图所示
根据dp数组的定义,
从[0] [0]出发走到[i] [j]上方(也就是[i] [j-1])有dp[i][j-1]种走法,其再往下走一步就可以到[i] [j](即等于dp[i][j])
从[0] [0]出发走到[i] [j]左侧(也就是[i-1] [j])有dp[i-1][j]种走法,其再往右走一步就可以到[i] [j]
(注意,以dp[i][j-1]为例,它指的是 走法 而不是走了几步,因此再往下走,不是dp[i][j-1] + 1)
因为题目说了每次只能向下或向左移动一步,所以上面的分析就已经把所有到达[i] [j]的可能路径表示出来了
即到达[i] [j]的路径种类等于从其上方到达的方式加上从其左边到达的方式
也就是:dp[i][j] = dp[i][j-1] + dp[i-1][j]
3、确定dp数组初始化方式
dp[i][j-1]是到达[i] [j]上方的所有路径,那么其一定使用了最上方部分(绿色)
同理,在推导dp[i-1][j]时也使用到了最左侧的部分(橙色)
那么,这两块区域就是我们要初始化的对象,即dp[0],[j]和dp[i],[0]
那么,初始值是多少呢?
还是联系dp数组的定义,我们发现,在最上方的绿色部分前进时,无论在哪一格、怎么走都只有一种方式前进(就是往右)
(因为题目规定只能往右或下走)
橙色的部分同理
因此绿色和橙色部分的每一个格子的dp值其实都是1,意味着不论从这两个区域中的哪一格出发,都只有一种前进方式
所以可以把dp[0],[j]和dp[i],[0]全部初始化为1
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;
4、确定遍历方式
因为只能往右或者下走,那前进顺序就是从左往右或者从上到下了
自然的,这也就是遍历的顺序
这样,在从左往右时,遍历的每一个格才能利用左边的上一个格来进行推导,从上到下同理
代码
这里创建的dp数组是二维的,结构如下:(举例)
m行->([0,0,0,0]为一行)
[[0,0,0,0], n列↓
[0,0,0,0],
[0,0,0,0],
[0,0,0,0],
[0,0,0,0]]
class Solution {
public:
int uniquePaths(int m, int n) {
//定义dp数组(先使用0初始化数组)
vector<vector<int>> dp(m, vector<int>(n, 0));
//初始化dp[i][0]和dp[0][j]
for(int i = 0; i < m; ++i) dp[i][0] = 1;
for(int j = 0; j < n; ++j) dp[0][j] = 1;
//遍历
for(int i = 1; i < m; ++i){//[0,0]已经初始化了,因此i、j都需要从1开始
for(int j = 1; j < n; ++j){
dp[i][j] = dp[i][j - 1] + dp[i - 1][j];//递推公式
}
}
return dp[m - 1][n - 1];//注意,这里需要减1,因为数组是从0开始数的,而mn是从1开始的
}
};
不同路径II
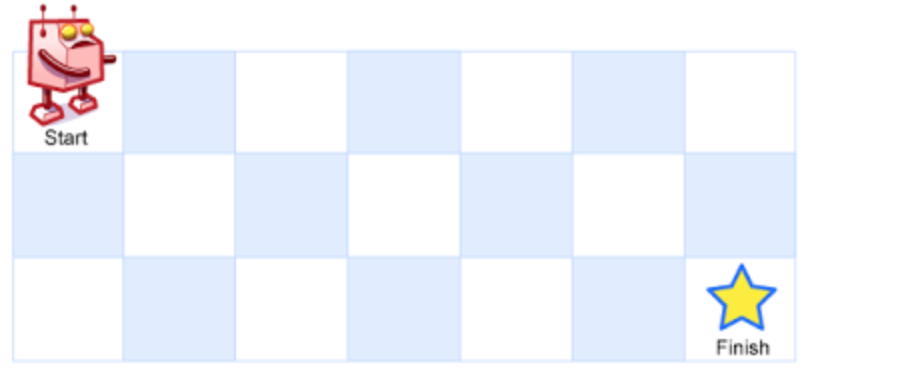
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 1:
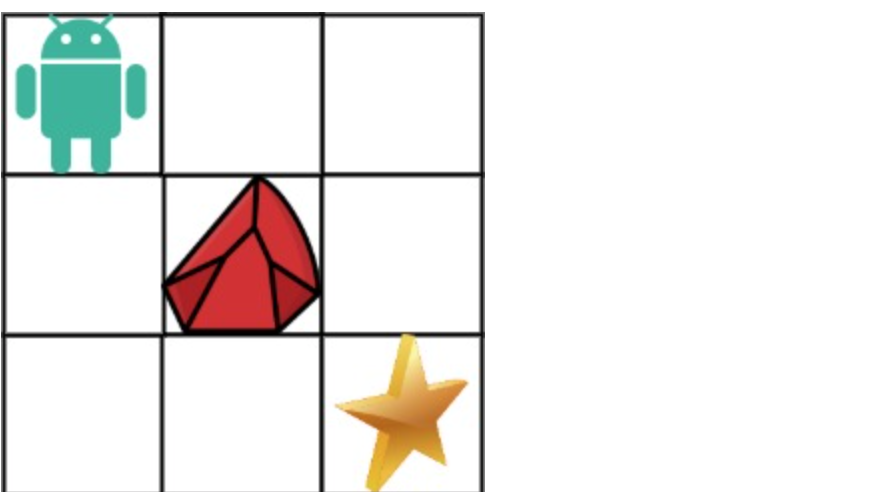
- 输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
- 输出:2 解释:
- 3x3 网格的正中间有一个障碍物。
- 从左上角到右下角一共有 2 条不同的路径:
- 向右 -> 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右 -> 向右
示例 2:

- 输入:obstacleGrid = [[0,1],[0,0]]
- 输出:1
提示:
- m == obstacleGrid.length
- n == obstacleGrid[i].length
- 1 <= m, n <= 100
- obstacleGrid[i] [j] 为 0 或 1
思路
这题是在上题的基础上增加了障碍物,主要区别在状态转换方程和dp数组初始化上
并且需要注意的是,本题是直接给了网格并在上面注明类障碍物的位置(0无障碍,1有障碍)
直接开始
五步走
1、确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
2、确定递推公式
这里递推公式的核心部分和上题一样,但是需要增加额外的条件
当遇到障碍时,障碍后面的路径就没有办法走到了,因此需要保持为0
if(obstacleGrid[i][j] == 0){//没遇到障碍物时就正常计算dp数组的值
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
3、确定dp数组初始化方式
因为引入了障碍,初始化方式会有所变化
还是拿之前的图来看
如果绿色和橙色部分(需要初始化的地方)有障碍物,那么从障碍物起,之后的位置都将标记为0,因为那些地方再也去不到了
(因为只能往右或下走)
于是初始化时需要加入条件
在上一题中,我们给出的初始化代码为:
vector<vector<int>> dp(m, vector<int>(n, 0));//初始值为0
if(int i = 0; i < m; ++i) dp[i][0] = 1;
if(int j = 0; j < n; ++j) dp[0][j] = 1;
本题中需要在for循环的结束条件中做改动
vector<vector<int>> dp(m, vector<int>(n, 0));//初始值为0
if(int i = 0; i < m && obstacleGrid[i][0] == 0; ++i) dp[i][0] = 1;
if(int j = 0; j < n && obstacleGrid[0][j] == 0; ++j) dp[0][j] = 1;
即在初始化绿色部分时,如果没遇到障碍物,正常初始化赋值;如果遇到了,就终止for循环,之后的位置保持值为0
(橙色部分同理)
4、确定遍历顺序
仍然是从左到右、从上到下,但在遍历过程中如果遇到障碍物,需要continue一下
for(int i = 0; i < m; ++i){
for(int j = 0; j < n; ++j){
if(obstacleGrid[i][j] == 1) continue;
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
5、打印dp数组
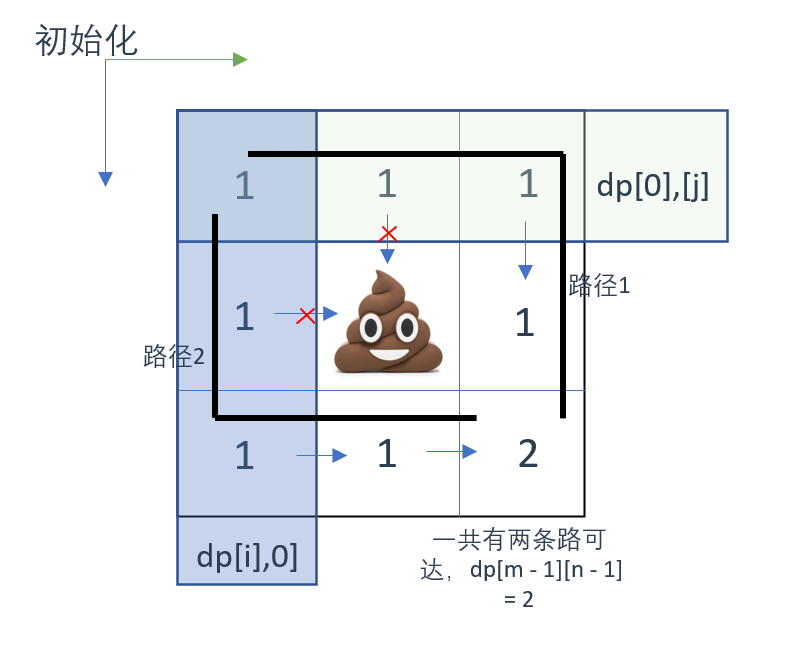
因为本题的逻辑相较于上题复杂了一些,所以有必要自己推算一下dp数组来确保结果的正确性
用示例1举例:
dp数组手动推导如图所示
完整代码
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
//创建dp数组
int m = obstacleGrid.size();
int n = obstacleGrid[0].size();
//如果在起点/终点出现障碍,直接返回0
if(obstacleGrid[0][0] == 1 || obstacleGrid[m - 1][n - 1] == 1) return 0;
vector<vector<int>> dp(m, vector<int>(n, 0));
//初始化dp数组
for(int i = 0; i < m && obstacleGrid[i][0] == 0; ++i) dp[i][0] = 1;
for(int j = 0; j < n && obstacleGrid[0][j] == 0; ++j) dp[0][j] = 1;
//遍历
for(int i = 1; i < m; ++i){
for(int j = 1; j < n; ++j){
if(obstacleGrid[i][j] == 1) continue;
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m - 1][n - 1];
}
};
注意:复制某些重复代码时,记得要修改完所有的对应值!!!
【LeetCode动态规划#02】图解不同路径I + II(首次涉及二维dp数组,)的更多相关文章
- LeetCode OJ:Search a 2D Matrix II(搜寻二维矩阵)
Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the follo ...
- LeetCode(113):路径总和 II
Medium! 题目描述: 给定一个二叉树和一个目标和,找到所有从根节点到叶子节点路径总和等于给定目标和的路径. 说明: 叶子节点是指没有子节点的节点. 示例:给定如下二叉树,以及目标和 sum = ...
- [LeetCode] Search a 2D Matrix II 搜索一个二维矩阵之二
Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the follo ...
- [LeetCode] 240. Search a 2D Matrix II 搜索一个二维矩阵 II
Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the follo ...
- [LeetCode] 272. Closest Binary Search Tree Value II 最近的二叉搜索树的值 II
Given a non-empty binary search tree and a target value, find k values in the BST that are closest t ...
- LeetCode OJ :Unique Binary Search Trees II(唯一二叉搜索树)
题目如下所示:返回的结果是一个Node的Vector: Given n, generate all structurally unique BST's (binary search trees) th ...
- leetcode——Search a 2D Matrix 二维有序数组查找(AC)
Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the follo ...
- [LeetCode] Unique Paths 不同的路径
A robot is located at the top-left corner of a m x n grid (marked 'Start' in the diagram below). The ...
- [LeetCode] Flatten 2D Vector 压平二维向量
Implement an iterator to flatten a 2d vector. For example,Given 2d vector = [ [1,2], [3], [4,5,6] ] ...
- Minimum Transport Cost(floyd+二维数组记录路径)
Minimum Transport Cost Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/O ...
随机推荐
- python读取与处理netcdf数据
netcdf是气候数据中的主流格式,当涉及到大范围的全球数万个格网点数据时,使用python脚本可以较快地读取与处理. import netCDF4 from netCDF4 import Datas ...
- LINUX配置固定IP以及DNS
配置固定ip #vim /etc/sysconfig/network-scripts/ifcfg-ens33 TYPE=EthernetPROXY_METHOD=noneBROWSER_ONLY=no ...
- java绘图技术
- python 如何实现多线程
今天本来打算学习学习多进程的,但是由于我现在的电脑没有Linux系统,无法通过Linux系统编辑一些多进程的程序,因此我打算从多线程入手. 多线程 我们的程序一般都是多任务的,如果你没有好好的利用好, ...
- WebApi 下载三维zip文件并预览
// 异步加载 const LoadObj = async (key?: string) => { LoadState.value = true var objStr, mtlStr var i ...
- CSS 选择器-认识并应用选择器
在内嵌式和外部css中,要想将CSS样式应用于特定的HTML元素,首先需要找到该目标元素,这时需要用到CSS中的选择器. 选择器:选择要添加样式的 HTML 标签的一种方法.模式. 首先学习 css2 ...
- 乘积小于K的子数组
乘积小于K的子数组 给你一个整数数组 nums 和一个整数 k ,请你返回子数组内所有元素的乘积严格小于 k 的连续子数组的数目. 示例 1: 输入:nums = [10,5,2,6], k = 10 ...
- C语言初级阶段4——数组2————二维数组
C语言初级阶段4--数组2----二维数组 二维数组的定义:类型说明符 数组名[数组大小] [数组大小] 第一个大小是行的大小,第二个大小是列的大小. 二维数组的初始化:{} #include< ...
- idea的tomcat控制台输出乱码
tomcat乱码问题 idea的tomcat控制台输出乱码 找到自己的安装目录 用vscode打开 ctrl+f打开搜索 输入encoding 最后一个是用来给idea中的控制台输出 --->改 ...
- 什么是js柯里化(curry)?
在数学和计算机科学中,柯里化是一种将使用多个参数的一个函数转换成一系列使用一个参数的函数的技术. 举例来说,一个接收3个参数的普通函数,在进行柯里化后,柯里化版本的函数接收一个参数并返回接收下一个参数 ...