ubuntu 14.04 (desktop amd 64) 安装和配置ROS Indigo
安装ROS
配置Ubuntu的软件源
配置Ubuntu要求允许接受restricted、universe和multiverse的软件源,可以根据下面的链接配置:
https://help.ubuntu.com/community/Repositories/Ubuntu
打开 SoftWare & Updates 选择清华源
更新software updater
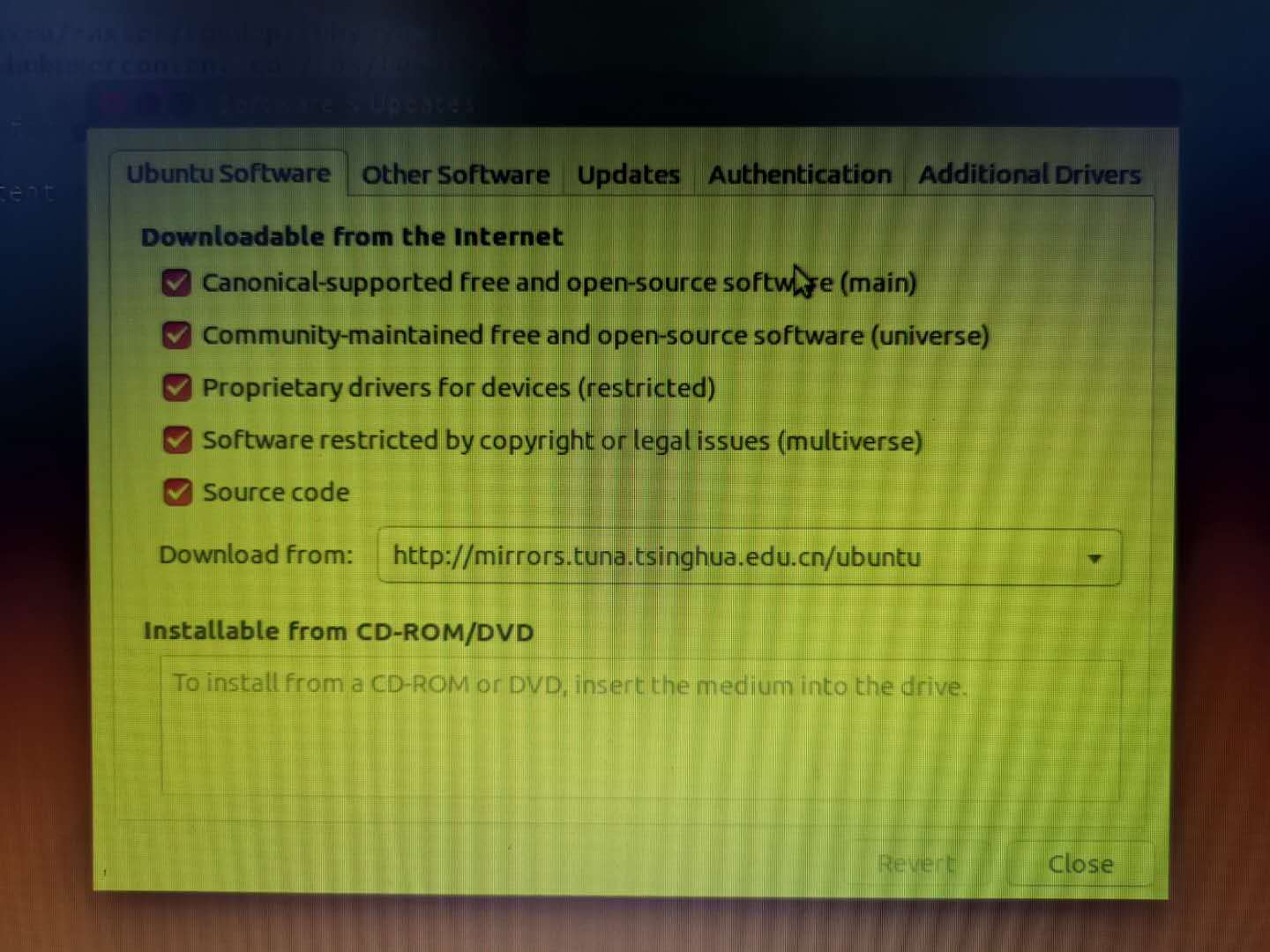
配置成如下图所示即可,一般情况下,这些配置都是默认的。设置为清华源,然后关闭时会提示更新,更新完毕即可。
1.
2.

添加软件源到sources.list
设置软件源的代码如下:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'一旦添加了正确的软件源,操作系统就知道去哪里下载程序,并根据命令自动安装软件。
设置密钥
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -安装
首先确认你的Debian的软件包索引是最新的。Debian计划是一个致力于创建一个自由操作系统的合作组织。我们所创建的这个操作系统名为 Debian。Debian系统目前采用Linux内核或者FreeBSD内核。
$ sudo apt-get update在ROS中有许多不同的函数库和工具,建议是完全安装,也可以根据自己的要求分别安装。完全安装时的工具包括ROS、rqt、可视化环境rviz、通用机器人库robot-generic libraries、2D(如stage)和3D(如Gazebo)仿真环境2D/3D simulators、导航功能包集navigation and 2D/3D(移动、定位、地图绘制、机械臂控制)、感知库perception(如视觉、激光雷达、RGB-D摄像头等)。
$ sudo apt-get install ros-indigo-desktop-full初始化rosdep
rosdep不仅能够使你更方便的安装一些系统依赖程序包,而且ROS的一些主要部件的运行也需要rosdep。
$ sudo rosdep init
$ rosdep update安装rosinstall
rosinstall命令是一个使用的非常频繁的命令,使用这个命令可以轻松的下载许多ROS软件包。
$ sudo apt-get install python-rosinstall设置环境
添加ROS的环境变量,这样,当你打开你新的shell时,你的bash会话中会自动添加环境变量。
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
# 使环境变量设置立即生效
$ source ~/.bashrc配置你的ROS环境
注意:当你用像apt这样的软件包安装管理器安装ROS,那么这些软件包用户是没有权利的去编辑的,当创建一个ROS package和处理一个ROS package时,你应该始终选择一个你有权限工作的目录作为工作目录。
管理你的环境
在安装ROS的时候,你会看到提示:source(命令)几个setup.*sh文件,或者甚至添加sourcing到你的shell启动脚本中。这是必须的,因为ROS依赖于结合使用shell环境的概念上。这使得开发依赖不同版本的ROS或者不同系列的package更加容易。
如果你在寻找或者使用你的ROS package上有问题,请确定的你的ROS环境变量设置好了,检查是否有ROS_ROOT和ROS_PACKAGE_PATH这些环境变量。
$ export | grep ROS如果没有,你需要source一些setup.*sh文件。
环境设置文件是为你产生的,但是可以来自不同的地方:
- 使用package管理器安装的ROS package提供setup.*sh文件;
- rosbuild workspace使用像rosws这样的工具提供setup.*sh文件;
- setup.*sh文件在编译和安装catkin package时作为副产品创建。
注意:rosbuild和catkin是两种组织和编译ROS代码的方式,前者简单易用,后者更加复杂但是提供更多灵活性尤其是对那些需要去集成外部代码或者想发布自己软件的人。
如果你在Ubuntu上使用apt工具安装ROS,那么你会在'/opt/ros/indigo/'目录中有setup.*sh文件,你可以这样source它们:
$ source /opt/ros/indigo/setup.bash你每次打开新的shell都需要运行这个命令,如果你把source /opt/ros/indigo/setup.bash添加进.bashrc文件就不必要每次打开一个新的shell都运行这条命令才能使用ROS的命令了。
创建ROS工作环境
对于ROS Groovy和之后的版本可以参考以下方式建立catkin工作环境。在shell中运行:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace可以看到在src文件夹中可以看到一个CMakeLists.txt的链接文件,即使这个工作空间是空的(在src中没有package),任然可以建立一个工作空间。
$ cd ~/catkin_ws/
$ catkin_makecatkin_make命令可以非常方便的建立一个catkin工作空间,在你的当前目录中可以看到有build和devel两个文件夹,在devel文件夹中可以看到许多个setup.*sh文件。启用这些文件都会覆盖你现在的环境变量,想了解更多,可以查看文档catkin。在继续下一步之前先启动你的新的setup.*sh 文件。
$ source devel/setup.bash为了确认你的环境变量是否被setup脚本覆盖了,可以运行一下命令确认你的当前目录是否在环境变量中:
$ echo $ROS_PACKAGE_PATH输出:
/home/youruser/catkin_ws/src:/opt/ros/indigo/share:
/opt/ros/indigo/stacks至此,你的环境已经建立好了,可以继续学习ROS文件系统了!
ubuntu 14.04 (desktop amd 64) 安装和配置ROS Indigo的更多相关文章
- ubuntu 14.04 (desktop amd 64) 下载
http://cdimage.ubuntu.com/ubuntukylin/releases/14.04/release/
- ubuntu 14.04(desktop amd 64) nginx 安装启动停止
sudo apt-get install nginx 关闭: sudo service nginx stop 启动: sudo nginx
- ubuntu 14.04 (desktop amd 64) 查看配置参数
硬盘型号 sudo hdparm -i /dev/sda |grep "Model" 硬盘数量大小 sudo fdisk -l |grep "Disk /dev/sd ...
- Ubuntu 14.04 下 android studio 安装 和 配置【转】
本文转载自:http://blog.csdn.net/xueshanfeihu0/article/details/52979717 Ubuntu 14.04 下 android studio 安装 和 ...
- (四)Ubuntu 14.04 文件服务器--samba的安装和配置
samba是Linux系统上的一种文件共享协议,可以实现Windows系统访问Linux系统上的共享资源,现在介绍一下如何在Ubuntu 14.04上安装和配置samba一. 一.更新源列表 打开&q ...
- [Linux 小技巧] Ubuntu 14.04 下编译、安装、配置最新开发版 GoldenDict
1. 背景介绍 GoldenDict 是一款非常优秀的跨平台电子词典软件,支持 StarDict.Babylon 等多种词典.其 PC 版基于 Qt 编写,完全免费.开源且没有广告.GoldenDic ...
- ubuntu 14.04 desktop装vnc4server
ubuntu 14.04 desktop上安装vnc4server要装上gnome的一些软件包并修改启动文件~/.vnc/xstartup 问题来源How to make VNC Server wor ...
- 在阿里云Ubuntu 14.04 Linux服务器上安装docker
参考 How To Install and Use Docker: Getting Started 这篇最靠谱的文档在阿里云 Ubuntu 14.04 服务器上成功安装 docker . ---- ...
- Ubuntu 14.04下 Java通用安装方法
参考: 解决Floodlight1.2+Mininet问题及使用安装 Ubuntu下安装JDK1.7图文详解 Ubuntu 14.04下 Java通用安装方法 1.到oracle官网下下载对应jdk包 ...
随机推荐
- 20180531-Postman 常用测试结果验证及使用技巧
- iOS 网易彩票-2框架搭建-代码重构
在上一篇中,我们基本已经把整个框架都搭建出来了,下面进行代码重构一下. 思路: 导航按钮,按下时,会变灰,那是系统自带了,通过自定义UIButton,实现按下按钮立即切换效果. MJTabBarCon ...
- Redis的设计与实现——字典
参考博客 绝大多数语言中的字典底层实现基本上都是哈希表.哈希表中用 “负载因子” 来衡量哈希表的 空/满 程度.为了让负载因子在一定的合理范围之内,提高查询的性能,一般的做法是让哈希表扩容,然后reh ...
- Vue.Js加入bootstrap及jquery,或加入其他插件vue-resource,vuex等
.引入jquery 项目目录下输入 cnpm install jquery --save-dev 用npm下载jq依赖 若想加入其他js库,如vue-resource,执行命令cnpm in ...
- tensorflow显存管理
在运行上面的blog的Tensorflow小程序的时候程序我们会遇到一个问题,当然这个问题不影响我们实际的结果计算,但是会给同样使用这台计算机的人带来麻烦,程序会自动调用所有能调用到的资源,并且全占满 ...
- 20154312 曾林 EXP9 Web安全基础
目录 -0.webgoat Could not find source file -1.基础问题回答 -2.环境配置 -3.Injection Flaws ----3.1.Numeric SQL In ...
- linux常用命令:grep 命令
Linux系统中grep命令是一种强大的文本搜索工具,它能使用正则表达式搜索文本,并把匹 配的行打印出来.grep全称是Global Regular Expression Print,表示全局正则表达 ...
- python实现常量const
新建const.py: #-*-coding:UTF-8-*- #Filename: const.py # 定义一个常量类实现常量的功能 # # 该类定义了一个方法__setattr()__,和一个异 ...
- SpringBoot之集成WebSocket
websocket是什么不做介绍.开发环境:jdk1.8,win7_64旗舰版,idea 1.初始化一个springboot项目 2.加入websocket依赖 <!-- springb ...
- MySQL数据库----基础操作
一.知识储备 数据库服务器:一台计算机(对内存要求比较高) 数据库管理系统:如mysql,是一个软件 数据库:oldboy_stu,相当于文件夹 表:student,scholl,class_list ...