[MicroPython]TurniBit开发板DIY自动窗帘模拟系统
一、准备工作
üTurnipBit 开发板 一块
ü下载数据线 一条
ü微型步进电机(28BYJ-48) 一个
ü步进电机驱动板(ULN2003APG) 一块
ü光敏传感器 一个
üTurnipBit 扩展板 一块
ü接入网络的电脑 一台
ü在线可视化编程器
<http://turnipbit.com/PythonEditor/editor.html>
二、步进电机的介绍
本次实验采用的是28BYJ-48 四相八拍电机,电压DC5V~12V。
24BYJ48名称的含义:
24:电机外径24mm
B:步进电机中步字的拼音首字母
Y:永磁中永字的拼音首字母
J:减速的减字拼音首字母
48:四相8步
实物图

工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
28BYJ-48 步进电机参数表

上表中启动频率≥550 P.P.S(每秒脉冲数),意思是要想正常启动,需要单片机每秒至少给出550个步进脉冲。那么每一节拍需要持续的时间就是1S/550≈1.8ms,所以控制节拍刷新的速率应大约1.8ms。
驱动原理
当连续不断的给电机发送控制脉冲时,电机就会不断的转动。每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,对应转子就会转过一定的角度(步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式:
四拍(单相绕组通电):A-B-C-D-A…
双四拍(双相绕组通电):AB-BC-CD-DA-AB-...
八拍: A-AB-B-BC-C-CD-D-DA-A…
三、器件的连接
1、将步进电机白色接头插到驱动板对应的座子上。
2、TurnipBit对应插入扩展板,记住带有LED灯和按键的一面朝向扩展板带有针脚的一侧。
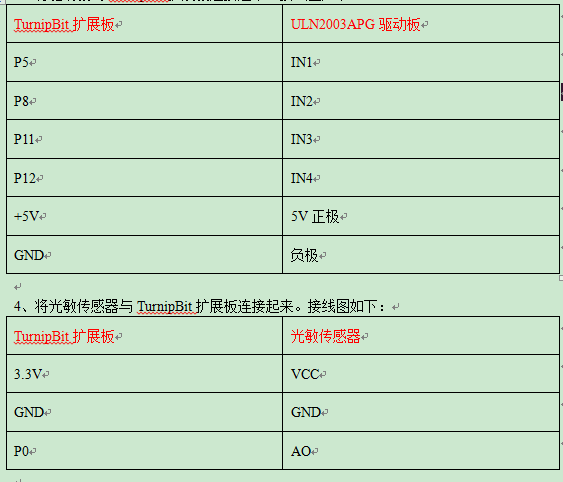
3、将驱动板与TurnipBit扩展板连接起来。接线图如下:
4、将光敏传感器与TurnipBit扩展板连接起来。接线图如下:
四、开始编程
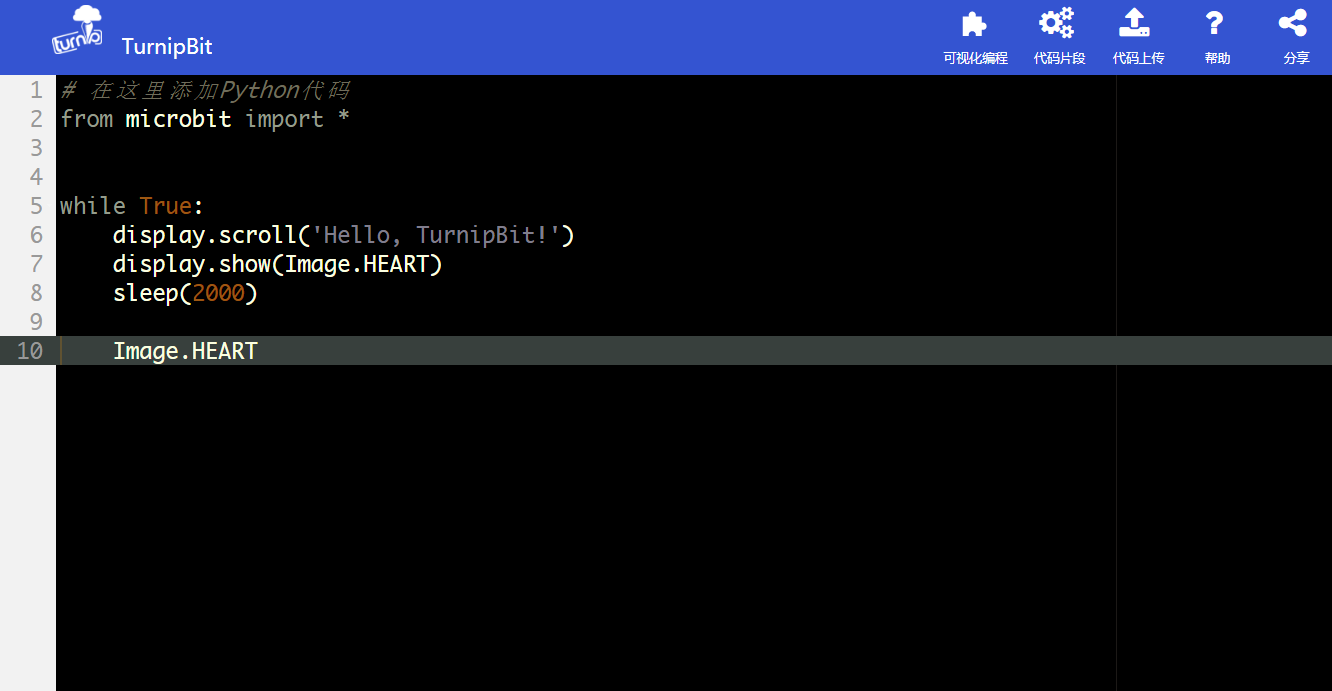
1、之前的教程一直都是使用拖拽可视化编程,这种方式可以快速让零基础小伙伴入门,但是在实际项目或工作中,还是要直接敲代码的。今天就给大家介绍一下TurnipBit的可视化编程器的另一项功能--代码编程。
之前看过编程的小伙伴,不难发现,一打开编辑器首先进入的就是代码编程器界面。如下图:
2、接下来用代码实现对步进电机的控制和光照数据的采集。
ü当光照变弱时,步进电机顺时针旋转一周,模拟关闭窗帘的操作;
ü当光照变强时,步进电机逆时针旋转一周,模拟打开窗帘的操作;
完成源代码:
# 在这里添加Python代码
from microbit import * Pin_All=[pin5,pin8,pin11,pin12] #转速(ms) 数值越大转速越慢 最小值1.8ms
speed=5 STEPER_ROUND=512 #转动一圈(360度)的周期
ANGLE_PER_ROUND=STEPER_ROUND/360 #转动1度的周期 isOpen=False#表示窗帘的状态 True:打开 False:关闭 def SteperWriteData(data):
count=0
for i in data:
Pin_All[count].write_digital(i)
count+=1
def SteperFrontTurn():
global speed SteperWriteData([1,1,0,0])
sleep(speed) SteperWriteData([0,1,1,0])
sleep(speed) SteperWriteData([0,0,1,1])
sleep(speed) SteperWriteData([1,0,0,1])
sleep(speed) def SteperBackTurn():
global speed SteperWriteData([1,1,0,0])
sleep(speed) SteperWriteData([1,0,0,1])
sleep(speed) SteperWriteData([0,0,1,1])
sleep(speed) SteperWriteData([0,1,1,0])
sleep(speed) def SteperStop():
SteperWriteData([0,0,0,0]) def SteperRun(angle):
global ANGLE_PER_ROUND val=ANGLE_PER_ROUND*abs(angle)
if(angle>0):
for i in range(0,val):
SteperFrontTurn()
else:
for i in range(0,val):
SteperBackTurn()
SteperStop() while True:
light=pin0.read_analog()#读取光敏传感器传递过来的模拟量数据
#数值越大说明光照度越小
if light>400:
if isOpen:
isOpen=False
SteperRun(-360)#光照小于设定的值,关闭窗帘
else:
if isOpen==False:
isOpen=True
SteperRun(360)#光照大于设定的值,打开窗帘
[MicroPython]TurniBit开发板DIY自动窗帘模拟系统的更多相关文章
- [MicroPython]TurnipBit开发板DIY自动浇水系统
1.实验目的: ?学习在PC机系统中扩展简单I/O 接口的方法 ?学习TurnipBit拼插编程 ?学习土壤传感器的工作原理以及使用方法 2.所需原器件: TurnipBit一块 TurnipBit扩 ...
- [MicroPython]STM32F407开发板DIY声光控开关
1.实验目的 1. 学习在PC机系统中扩展简单I/O 接口的方法. 2. 进一步学习编制数据输出程序的设计方法. 3. 学习光敏模块的工作原理. 4. 学习声音的工作原理. 5. 学习F40 7Mic ...
- [MicroPython]TPYBoard开发板DIY小型家庭气象站
对于喜欢登山的人来说,都会非常关心自己所处的高度跟温度,海拔高度的测量方法,海拔测量一般常用的有两种方式,一是通过GPS全球定位系统,二是通过测出大气压,根据气压值算出海拔高度. BMP180是一直常 ...
- [MicroPython]TurniBit开发板旋转按钮控制脱机摆动
一.实验目的: ?学习在PC机系统中扩展简单I/O 接口的方法 ?学习TurnipBit拼插编程 ?了解舵机工作原理 ?学习TurnipBit扩展板舵机和旋转按钮接线方式 二.所需原器件: ?Turn ...
- 海思HI3518EV200+AR0130开发板DIY——前篇
海思HI3518EV200+AR0130开发板DIY 今天开始要围绕这个项目学习了(还是得从C开始学 ) 缘起(这段主要水废话)相关开发资料 →_→ 原理图设计 原理图整体框架 一.电源部分 HI35 ...
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- MicroPython的开发板
比如: pyboard micro:bit ESP8266/ESP32 stm32等等 什么是pyboard? pyboard是官方的MicroPython微控制器板,完全支持软件功能.硬件有: ST ...
- 【wifi移植 3】开发板wifi自动获取IP
内核版本:3.4.61 1. 配置内核,支持DHCP ~/kernel$ make menuconfig [*] Networking support ---> Networking opti ...
随机推荐
- IntelliJ IDEA安装、配置、测试
IntelliJ IDEA安装.配置.测试(win7_64bit) 目录 1.概述 2.本文用到的工具 3.安装.激活与配置 4.开发测试 4.1 JavaSE开发测试(确保JDK已正确安装) 4.2 ...
- Linux Linux下最大文件描述符设置
Linux下最大文件描述符设置 by:授客 QQ:1033553122 1. 系统可打开最大文件描述符设置 查看系统可打开最大文件描述符 # cat /proc/sys/fs/file-max 6 ...
- 关于正餐智能POS6.0.1.1改版后,点击反结账进入点菜界面后无法进行加菜的FAQ
适用版本:智能POS正餐V6.0.1.1+适用情况:点击反结账进入点菜界面后无法进行加菜.原因:为让报表统计的数据更准确解决方案:1.点击反结账,输入用户密码,进入点菜界面. 2.点击结算,进入收银台 ...
- java笔记----java新建生成用户定义注释
${filecomment} ${package_declaration} /** * @author ${user} * @date 创建时间:${date} ${time} * @version ...
- ajax参数
$.ajax({ type: "GET", url: "Login.ashx", dataType: "text", cache: fals ...
- WebAPI接口设计:SwaggerUI文档 / 统一响应格式 / 统一异常处理 / 统一权限验证
为什么还要写这类文章?因为我看过网上很多讲解的都不够全面,而本文结合实际工作讲解了swaggerui文档,统一响应格式,异常处理,权限验证等常用模块,并提供一套完善的案例源代码,在实际工作中可直接参考 ...
- 洗礼灵魂,修炼python(85)-- 知识拾遗篇 —— 深度剖析让人幽怨的编码
编码 这篇博文的主题是,编码问题,老生常谈的问题了对吧?从我这一套的文章来看,前面已经提到好多次编码问题了,的确这个确实很重要,这可是难道了很多能人异士的,当你以为你学懂了,在研究爬虫时你发现你错了, ...
- python第一百零九天---Django 4
session :1. Session 基于Cookie做用户验证时:敏感信息不适合放在cookie中 a. Session原理 Cookie是保存在用户浏览器端的键值对 Session是保存在服务器 ...
- 数据挖掘---Pandas的学习
Pandas介绍(panel + data + analysis) 为什么使用Pandas 便捷的数据处理能力 读取文件方便 封装了Matplotlib.Nu ...
- May 27. 2018 Week 22nd Sunday
All things come to those who wait. 苍天不负有心人. It is said that those who are patient can see what their ...