minimize.m:共轭梯度法更新BP算法权值
minimize.m:共轭梯度法更新BP算法权值
作者:凯鲁嘎吉 - 博客园 http://www.cnblogs.com/kailugaji/
Carl Edward Rasmussen在高斯机器学习的MATLAB代码中写到一个优化类的函数:minimize.m,同时,Geoff Hinton在用BP算法精调深度自编码网络时,也借鉴了这个函数minimize.m,下面来简单聊一聊这个函数的大致机理。
matlab函数minimum.m用来查找(非线性)多元函数的(局部)最小值。用户必须提供一个函数,该函数返回所有变量的值和偏导数。该函数基于具有Wolfe-Powel条件的多项式插值,使用Polak-Ribiere共轭梯度和近似线性搜索。
作用:Minimize a differentiable multivariate function.
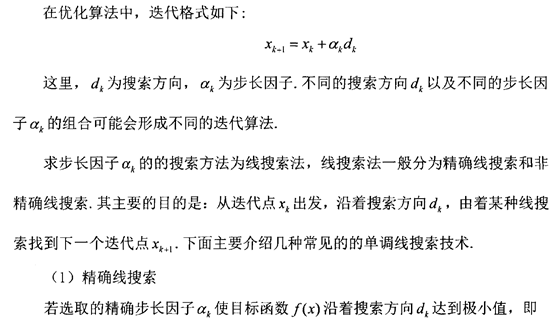
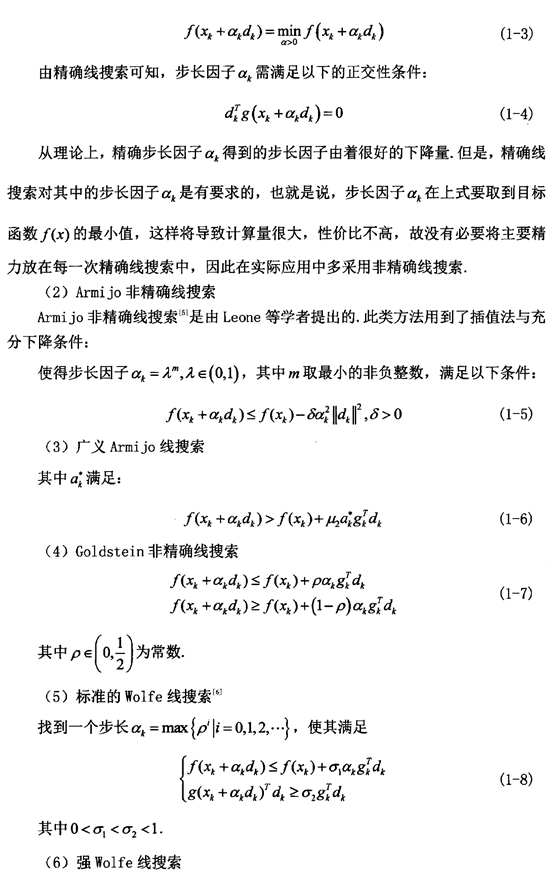
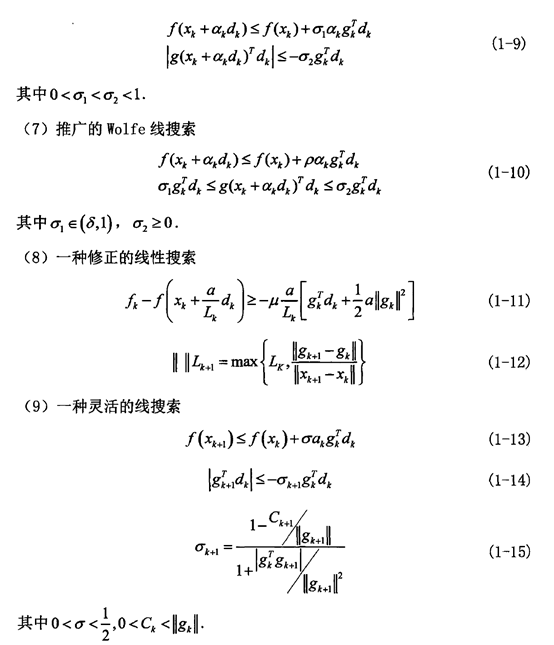
1. 线性搜索技术——确定迭代步长
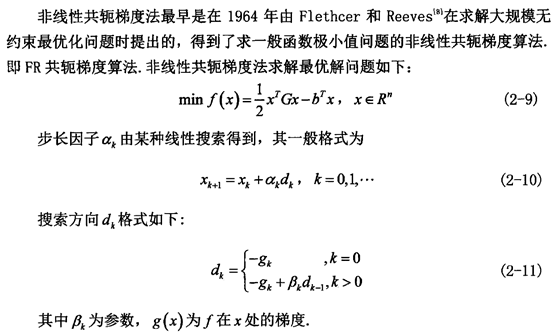
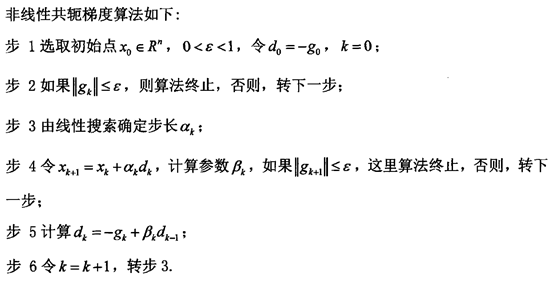
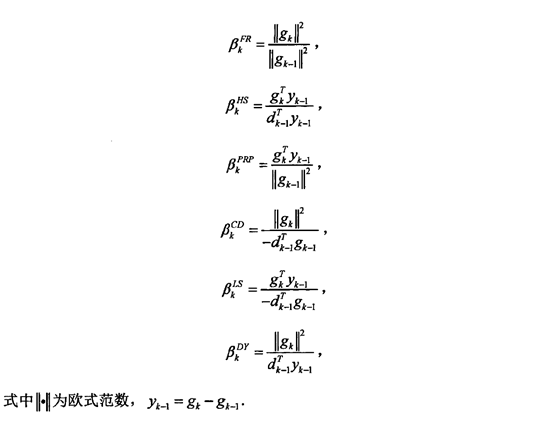
2. 非线性共轭梯度法——确定搜索方向

3. MATLAB代码详解
function [X, fX, i] = minimize(X, f, length, varargin)
%X是权值偏置 f输出的是代价函数和偏导 3次线性搜索 每层网络对应的节点数Dim和训练数据data
%f是一个函数的名称,它主要是用来计算网络中的代价函数以及代价函数对各个参数X的偏导函数,f的参数值分别为X,以及minimize函数后面的P1,P2,P3,…使用共轭梯度法进行优化的最大线性搜索长度为length。
%返回值X为3次线性搜索最优化后得到的权值参数,是一个列向量,fX为在此最优参数X下的代价函数,i为线性搜索的长度(即迭代的次数)。 % Minimize a differentiable multivariate function.
%
% Usage: [X, fX, i] = minimize(X, f, length, P1, P2, P3, ... ) %更新参数W和b,ΔW=步长*方向,Δb=步长*方向。步长用Wolfe不确定线性搜索进行计算,而下降的方向用Polack-Ribiere共轭梯度进行计算。最终输出更新完之后的参数W,b %最小化连续微分多元函数。 %起点由“ X”(D乘1)给定,并且在字符串“ f”中命名的函数必须返回函数值和偏导数向量。
%共轭梯度的Polack-Ribiere风格用于计算搜索方向,并且使用二次多项式和三次多项式逼近以及Wolfe-Powell停止准则的线搜索以及斜率比方法来猜测初始步长。
%此外,还要进行大量检查,以确保正在进行探索,并且推断不会无边无际。
%“length”给出了运行的长度:如果为正,则给出最大的线性搜索次数;如果为负,则其绝对值给出最大的函数求值次数。
%当函数的长度变长或无法进一步进行处理时(即,我们处于最小状态,或由于数值问题而接近时,我们无法进一步接近),该函数将返回。
%如果函数在几次迭代中终止,则可能表明函数值和导数不一致(即,“ f”函数的实现中可能存在错误)。
%函数返回找到的解“ X”,函数值“ fX”的向量表示进展,“ i”使用的迭代次数(线性搜索或函数评估,取决于“length”的符号)。 %当函数的长度增加或无法进一步处理时(即,我们处于(局部)最小值,或由于数值问题而接近),函数将返回。
%注意:如果函数在几次迭代中终止,则可能表明函数值和导数不一致(即,“ f”函数的实现中可能存在错误)。
%函数返回找到的解“ X”,函数值“ fX”的向量表示进展,“ i”使用的迭代次数(行搜索或函数评估,取决于“长度”的符号)。 INT = 0.1; % don't reevaluate within 0.1 of the limit of the current bracket不要在当前括号限制的0.1以内重新评估
EXT = 3.0; % extrapolate maximum 3 times the current step-size外推最大值为当前步长的3倍
MAX = 20; % max 20 function evaluations per line search每次线性搜索最多20个函数求值
RATIO = 10; % maximum allowed slope ratio最大允许斜率
SIG = 0.1; RHO = SIG/2;
% SIG和RHO是控制Wolfe-Powell条件的常数。
% SIG是先前斜率和新斜率(搜索方向上的导数)之间允许的最大绝对比率,因此将SIG设置为低(正)值将强制线搜索中的更高精度。
% RHO是期望值的最小允许分数(从线性搜索中起始点的斜率开始)。
% 常数必须满足0 <RHO <SIG <1。调整SIG(取决于要优化的函数的性质)可能会加快最小化;使用rho可能不值得。 %在开始沿着最陡下降的方向进行初始行搜索之后,代码自然分为3部分。
%1)我们首先进入一个while循环,它使用点1(p1)和(p2)来计算外推(p3),直到我们外推足够远(wolfe-powell条件)。
%2)如有必要,我们进入第二个循环,其中p2、p3和p4选择包含(局部)最小值的子区间,并对其进行插值,找到一个可接受的点(wolfe-powell条件)。请注意,点始终保持顺序p0<=p1<=p2<p3<p4。
%3)使用共轭梯度(polack-ribiere-flavor)计算新的搜索方向,或者在前一线性搜索中出现问题时恢复到最陡。
%如果两个连续的线性搜索失败,或者当函数计算或线性搜索用完时,返回迄今为止的最佳值。
%在外推过程中,“f”函数可能会因错误或返回nan或inf而失败,minimize应该能很好地处理这个问题。
if max(size(length)) == 2
red=length(2);
length=length(1);
else %length=3
red=1;
end
if length>0
S='Linesearch'; %线性搜索
else
S='Function evaluation'; %函数求值
end i = 0; % zero the run length counter 运行长度计数器清零
ls_failed = 0; % no previous line search has failed先前的线性搜索没有失败
[f0 df0] = feval(f, X, varargin{:}); % get function value and gradient
fX = f0;
i = i + (length<0); % count epochs?!
s = -df0; d0 = -s'*s; % initial search direction (steepest) and slope初始搜索方向(最陡,负梯度方向)和斜率
x3 = red/(1-d0); % initial step is red/(|s|+1) 初始步长 while i < abs(length) % while not finished
i = i + (length>0); % count iterations?! X0 = X; F0 = f0; dF0 = df0; % make a copy of current values
if length>0, M = MAX; else M = min(MAX, -length-i); end
%用p1、p2外推p3
while 1 % keep extrapolating as long as necessary
x2 = 0; f2 = f0; d2 = d0; f3 = f0; df3 = df0;
success = 0;
while ~success && M > 0
try
M = M - 1; i = i + (length<0); % count epochs?!
[f3 df3] = feval(f, X+x3*s, varargin{:}); %权值(t+1)=权值(t)+初始步长*初始搜索方向
if isnan(f3) || isinf(f3) || any(isnan(df3)+isinf(df3)), error(''), end
success = 1;
catch % catch any error which occured in f
x3 = (x2+x3)/2; % bisect and try again %步长等分,选取新搜索点
end
end
if f3 < F0, X0 = X+x3*s; F0 = f3; dF0 = df3; end % keep best values
d3 = df3'*s; % new slope
if d3 > SIG*d0 || f3 > f0+x3*RHO*d0 || M == 0 % are we done extrapolating?
break
end
x1 = x2; f1 = f2; d1 = d2; % move point 2 to point 1
x2 = x3; f2 = f3; d2 = d3; % move point 3 to point 2
A = 6*(f1-f2)+3*(d2+d1)*(x2-x1); % make cubic extrapolation
B = 3*(f2-f1)-(2*d1+d2)*(x2-x1);
x3 = x1-d1*(x2-x1)^2/(B+sqrt(B*B-A*d1*(x2-x1))); % num. error possible, ok!
if ~isreal(x3) || isnan(x3) || isinf(x3) || x3 < 0 % num prob | wrong sign?
x3 = x2*EXT; % extrapolate maximum amount
elseif x3 > x2*EXT % new point beyond extrapolation limit?
x3 = x2*EXT; % extrapolate maximum amount
elseif x3 < x2+INT*(x2-x1) % new point too close to previous point?
x3 = x2+INT*(x2-x1);
end
end % end extrapolation
%插值p2、p3和p4
while (abs(d3) > -SIG*d0 || f3 > f0+x3*RHO*d0) && M > 0 % keep interpolating
if d3 > 0 || f3 > f0+x3*RHO*d0 % choose subinterval
x4 = x3; f4 = f3; d4 = d3; % move point 3 to point 4
else
x2 = x3; f2 = f3; d2 = d3; % move point 3 to point 2
end
if f4 > f0
x3 = x2-(0.5*d2*(x4-x2)^2)/(f4-f2-d2*(x4-x2)); % quadratic interpolation 二次插值
else
A = 6*(f2-f4)/(x4-x2)+3*(d4+d2); % cubic interpolation 三次插值
B = 3*(f4-f2)-(2*d2+d4)*(x4-x2);
x3 = x2+(sqrt(B*B-A*d2*(x4-x2)^2)-B)/A; % num. error possible, ok!
end
if isnan(x3) || isinf(x3)
x3 = (x2+x4)/2; % if we had a numerical problem then bisect
end
x3 = max(min(x3, x4-INT*(x4-x2)),x2+INT*(x4-x2)); % don't accept too close
[f3 df3] = feval(f, X+x3*s, varargin{:});
if f3 < F0, X0 = X+x3*s; F0 = f3; dF0 = df3; end % keep best values
M = M - 1; i = i + (length<0); % count epochs?!
d3 = df3'*s; % new slope
end % end interpolation
%用Polack-Ribiere共轭梯度法更新搜索方向
if abs(d3) < -SIG*d0 && f3 < f0+x3*RHO*d0 % if line search succeeded
X = X+x3*s; f0 = f3; fX = [fX' f0]'; % update variables
fprintf('%s %6i; Value %4.6e\r', S, i, f0);
s = (df3'*df3-df0'*df3)/(df0'*df0)*s - df3; % Polack-Ribiere 共轭梯度方向 搜索方向的更新公式
df0 = df3; % swap derivatives
d3 = d0; d0 = df0'*s;
if d0 > 0 % new slope must be negative
s = -df0; d0 = -s'*s; % otherwise use steepest direction 负梯度方向
end
x3 = x3 * min(RATIO, d3/(d0-realmin)); % slope ratio but max RATIO
ls_failed = 0; % this line search did not fail
else
X = X0; f0 = F0; df0 = dF0; % restore best point so far
if ls_failed || i > abs(length) % line search failed twice in a row
break; % or we ran out of time, so we give up
end
s = -df0; d0 = -s'*s; % try steepest
x3 = 1/(1-d0);
ls_failed = 1; % this line search failed
end
end
fprintf('\n');
4. 参考文献
[1]汪丹戎. 非线性共轭梯度法及全局收敛性分析[D].长江大学,2016.
[2] Quadratic and Cubic Search for a Minimum
[3] 2006, Carl Edward Rasmussen, Minimize
[5] 景慧丽. 无约束最优化问题的算法研究与实现[D].西安科技大学,2009.
[6] 数值优化(Numerical Optimization)学习系列-线搜索方法(LineSearch)
minimize.m:共轭梯度法更新BP算法权值的更多相关文章
- 表A中有两个表示时间的字段A,B;如果B的值大于A的值,则把B的值更新为A的值
sql语句:表A中有两个表示时间的字段A,B:如果B的值大于A的值,则把B的值更新为A的值 update 表名 set B=A where B>A
- HDU 1754 I Hate It(线段树之单点更新,区间最值)
I Hate It Time Limit: 9000/3000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) Total ...
- 计蒜客 28315.Excellent Engineers-线段树(单点更新、区间最值) (Benelux Algorithm Programming Contest 2014 Final ACM-ICPC Asia Training League 暑假第一阶段第二场 E)
先写这几道题,比赛的时候有事就只签了个到. 题目传送门 E. Excellent Engineers 传送门 这个题的意思就是如果一个人的r1,r2,r3中的某一个比已存在的人中的小,就把这个人添加到 ...
- 使用SQL中的update更新多个字段值
使用SQL中的update更新多个字段值,set后面的条件要用逗号不能用and set后面的多个条件之间没有关联也不可以有关联,所以就不能用and了:where 条件后面 可以为and 如: upda ...
- vue中.sync修饰符,实现子组件实时更新父组件的值
vue 修饰符sync的功能是:当一个子组件改变了一个 prop 的值时,这个变化也会同步到父组件中所绑定. 不过它有一个前身,先来看看.sync出现之前是如何实现的 父组件中(传递给子组件一个值:p ...
- mongodb 更新嵌套数组的值
概要 本文主要讲述在 mongodb 中,怎么更新嵌套数组的值. 使用$更新数组 基本语法 { "<array>.$" : value } 可以用于:update, ...
- Vue 子组件更新父组件的值
今天在使用Vue中遇到了一个新的需求:子组件需要修改由父组件传递过来的值,由于子组件的值是由父组件传递过来的,不能直接修改属性的值, 我们想改变传递过来的值只能通过自定义事件的形式修改父组件的值达到修 ...
- sql 批量更新某个字段的值
UPDATE Tabel1 t1 set t1.col1= ( SELECT col2 from Tabel2 t2 WHERE t1.col1=t2.col2) where exists ( SEL ...
- 更新AD对象属性值
1. 对于Set-ADUser不包含的对象属性,可以采用replace来操作 Set-ADUser -Identity 'UserA' -Replace @{userWorkstations = 'C ...
随机推荐
- oracle12.2RAC之OGG安装配置(二)
本机到本机的配置: 源端 10.1.83.144:1521/SIBP_GSDY HNSIB_GSDY目标端 10.1.83.144:1521/SIBP_GS HN ...
- webpack打包 The 'mode' option has not been set, webpack will fallback to
webpack 打包报错 The 'mode' option has not been set, webpack will fallback to 'production' for,Module no ...
- C# JsonConvert 序列号 DateTime类型 格式多T
序列化字符串后,值变成了"2018-02-05T00:00:00" 序列化时候 需要更改一下日期转换方式: IsoDateTimeConverter timeConverter = ...
- driver.find_element_by_xpath.clear()无法清空输入框默认值
输入框带默认值,想删除默认值,填写新内容,使用clear()再send_keys(), 发现这种方式无法清除,只会在默认值后面追加新的内容. 上网搜了一下,有两种解决方案,如下: 方法一: 先双击,后 ...
- ios App 开发指南
开发者账号申请 http://www.applicationloader.net/blog/zh/547.html https://zhuanlan.zhihu.com/p/66118041 http ...
- 小程序-引用的两种方式:import和include
import import可以在该文件中使用目标文件定义的template,如: 在mine.wxml中定义了一个叫item的template: <template name="ite ...
- 【洛谷4585】[FJOI2015] 火星商店问题(线段树分治)
点此看题面 大致题意: 有\(n\)家店,每个商品有一个标价.每天,都可能有某家商店进货,也可能有某人去购物.一个人在购物时,会于编号在区间\([L_i,R_i]\)的商店里挑选一件进货\(d_i\) ...
- 数位DP入门详解+题目推荐
\(update:2019-9-6\) 博客里某些东西没有解释清楚,完善了对应的解释 在开始之前,我们先来看一道题--题目链接 题目要求,相邻两位的差大于等于2,那么我们先来构造一个试一试. 比如说\ ...
- Ubuntu 16.04 安装 mujoco, mujoco_py 和 gym
Mujoco (1)官网(https://www.roboti.us/license.html)注册 license,教育邮箱注册可以免费使用一年.注意:一个邮箱账号只能供一台主机使用. 填写个人信息 ...
- C语言程序设计100例之(3): Cantor表
例3 Cantor表 题目描述 现代数学的著名证明之一是Georg Cantor证明了有理数是可枚举的.他是用下面这一张表来证明这一命题的: 1/1 1/2 1/3 1/4 …… 2/1 ...