Cesium和Kaarta用高分辨率激光雷达可视化室内和地下环境
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/
Cesium使急救人员和军事操作人员更容易快速评估和了解密集和不断变化的城市环境。
Cesium支持任何尺度的可视化,从全球到亚厘米。我们最近改进了对地下可视化的支持,探索地下环境可以直观地与地上数据无缝集成。
最近,我们将这些能力用于密集城市在线挑战的测试,该挑战由国防部的国家安全创新网络(NSI)组织Dense Urban Online Challenge,旨在解决第一响应者和军事运营商在高密度和复杂地下结构城市工作时遇到的问题。
针对这一挑战,我们与Kaarta合作,展示了Cesium如何通过汇集所有数据并将其可视化,为决策者提供所需的信息和洞察力,从而为众多应用程序解决这些操作问题提供动力。

Kaarta捕获的,纽约市东侧通道的一部分
在Hackathon上,我们展示了由Kaarta的移动3D扫描仪收集的纽约市隧道。这些点云是用他们的手持式设备捕捉到的,只要带着这个设备穿过隧道,激光精度就在3厘米以内。它生成的点云是用Cesium ion拼接和定位的。
这里的价值在于,可以快速捕捉到这些精确的三维扫描,并且可以经常这样做,这样你就可以得到一张永远是最新的地图,即使是那些正在积极开发的项目,比如纽约市东区的交通隧道。对于第一反应人员和军事操作人员来说,这些密集环境的最新地图对于决策至关重要。
由于像这样的设备使接近实时的高分辨率扫描成为可能,有了Cesium,可以将这些扫描组合起来,看看任何给定领域的所有项目是如何同时开发的。通过与其他数据集相结合,很容易计划潜在的entire,例如,通过覆盖下水道系统的地图来确保它不会变得太近。使用Cesium的测量工具,这些分析是如此简单和完整。
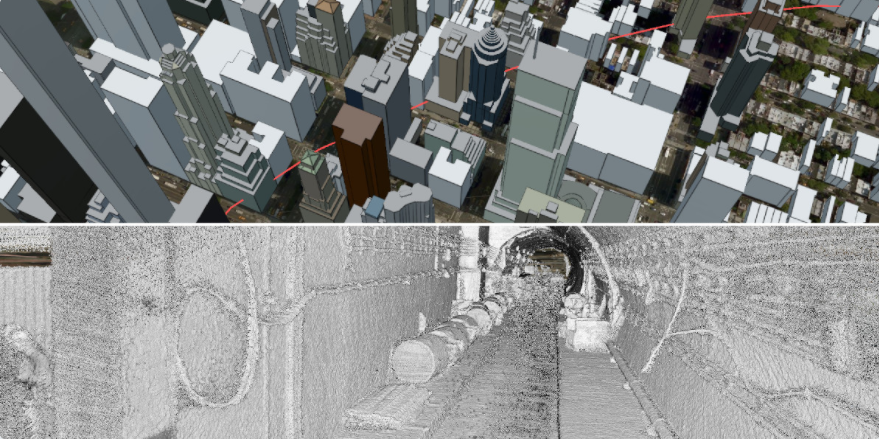
上图:纽约市地面视图,隧道位置用红色标出。下图:隧道内部视图。
在参加了“NSIN Dense Urban Online Challenge”的31支队伍中,我们是5支被选中参加当面黑客竞赛的队伍之一。我们很高兴能提供一个平台,让其他人能够解决这些复杂的挑战。如果你在做地下工作,或者你对Cesium用于国防感兴趣,请联系我brady@cesium.com。
原文链接:https://cesium.com/blog/2020/08/25/national-security-hackathon/
作者:Brady Moore
评语:挺牛的。
Cesium中文网交流QQ群:807482793
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/
Cesium和Kaarta用高分辨率激光雷达可视化室内和地下环境的更多相关文章
- Atitit.可视化编程jbpm6 的环境and 使用总结...
Atitit.可视化编程jbpm6 的环境and 使用总结... 1. Jbpm的意义 1 2. Jbpm6环境配置 2 2.1. Down 2 2.2. Install eclipse jbpm p ...
- Ubuntu部署可视化爬虫Portia2.0环境
部署portia环境官方文档给出的方法太过简单,对于初学者来说是很难根据那一两行字成功部署portia环境的.对于部署portia这只可爱的爬虫的过程还是有很多坑的,主要写一篇portia2.0版本的 ...
- Ubuntu部署可视化爬虫Portia2.0环境以及入门
http://www.cnblogs.com/kfpa/p/Portia.html http://brucedone.com/archives/986
- WebGL可视化地球和地图引擎:Cesium.js
http://www.open-open.com/lib/view/open1427341416418.html Cesium 是一个JavaScript 库用于在Web浏览器创建 3D 地球和 ...
- 用Cesium可视化地下设施、矿山和地质层
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ 本月的CesiumJS 1.70发布引入的一项关键改进是地下数据 ...
- ZTMap室内地图定位平台设计方案
1 系统总体设计 1.1 系统概述 基于臻图信息室内GIS地图平台和室内定位平台,通过室内定位设备的部署和信号采集,实现对室内人员和资产的实时定位.路线导航.区域管控告警.客流统计等相关功能. ...
- lidar激光雷达领域的分类
lidar领域可以按分为以下五方面: 激光雷达系统与装备 激光雷达系统与开发 激光雷达光源 激光雷达探测 多光谱激光雷达系统 单光子激光雷达系统 低成本RGB-D距离传感器 激光雷达元器件及装备等 激 ...
- Cesium中级教程9 - Advanced Particle System Effects 高级粒子系统效应
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ 要了解粒子系统的基础知识,请参见粒子系统入门教程. Weathe ...
- Cesium入门7 - Adding Terrain - 添加地形
Cesium入门7 - Adding Terrain - 添加地形 Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com ...
随机推荐
- MySQLs数据库建外键时自动跑到缩影处,真奇怪
MySQLs数据库建外键时自动跑到缩影处,真奇怪MyISAM引擎不支持外键:InnoDB存储引擎支持外键.如何解决的,把表修改成innodb类型吧用的工具是SQLyog Ultimate如图所示:
- DKT模型及其TensorFlow实现(Deep knowledge tracing with Tensorflow)
今年2月15日,谷歌举办了首届TensorFlow Dev Summit,并且发布了TensorFlow 1.0 正式版. 3月18号,上海的谷歌开发者社区(GDG)组织了针对峰会的专场回顾活动.本文 ...
- Linux使用docker安装flink
配置文件不是原始的 修改过,可以根据自己的配置文件来 jobmanager配置 flink-conf.yaml ############################################ ...
- MIUI12.5扫码之后无法连接MIUI+,显示连接失败
设置-应用设置-应用管理-小米互联通信服务(如果没有找到,进行搜索即可)-清除数据 重新扫码连接就可以连上了 (感觉不怎么样,不知道是不是我网卡,用起来卡卡的...)
- c++设计模式概述之工厂
类写的不规范,原因: 缩短篇幅,实际中请不要这样写. 欢迎指正 工厂模式,如其名,想象下现实生活中的工厂,比如Apple的组装工厂,小米产品的组装工厂,华为设备的组装工厂.对我们用户而言,不需要知道他 ...
- iOS越狱插件源查找及避免插件劫持
1.关于 iOS越狱插件源查找地址:https://www.ios-repo-updates.com/ 2.注意 不要使用不可靠的第三方源,其可能存在劫持,而你却茫然不知. 使用上面的网站查找你需要的 ...
- 【LeetCode】面试题62. 圆圈中最后剩下的数字 解题报告(Python)
作者: 负雪明烛 id: fuxuemingzhu 个人博客:http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 约瑟夫环 日期 题目地址:https://leetco ...
- 【LeetCode】370. Range Addition 解题报告(C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客:http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 只修改区间起终点 日期 题目地址:https://le ...
- 【LeetCode】714. Best Time to Buy and Sell Stock with Transaction Fee 解题报告(Python & C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 动态规划 日期 题目地址:https://leetc ...
- idea解决springboot项目中log4j漏洞升级问题
最近阿里云团队发现log4j漏洞,危险级别:严重,相关资讯 https://m.sohu.com/coo/hsdt/506958086_355140 https://www.sohu.com/a/50 ...