SMACH专题(二)----Concurrent状态机
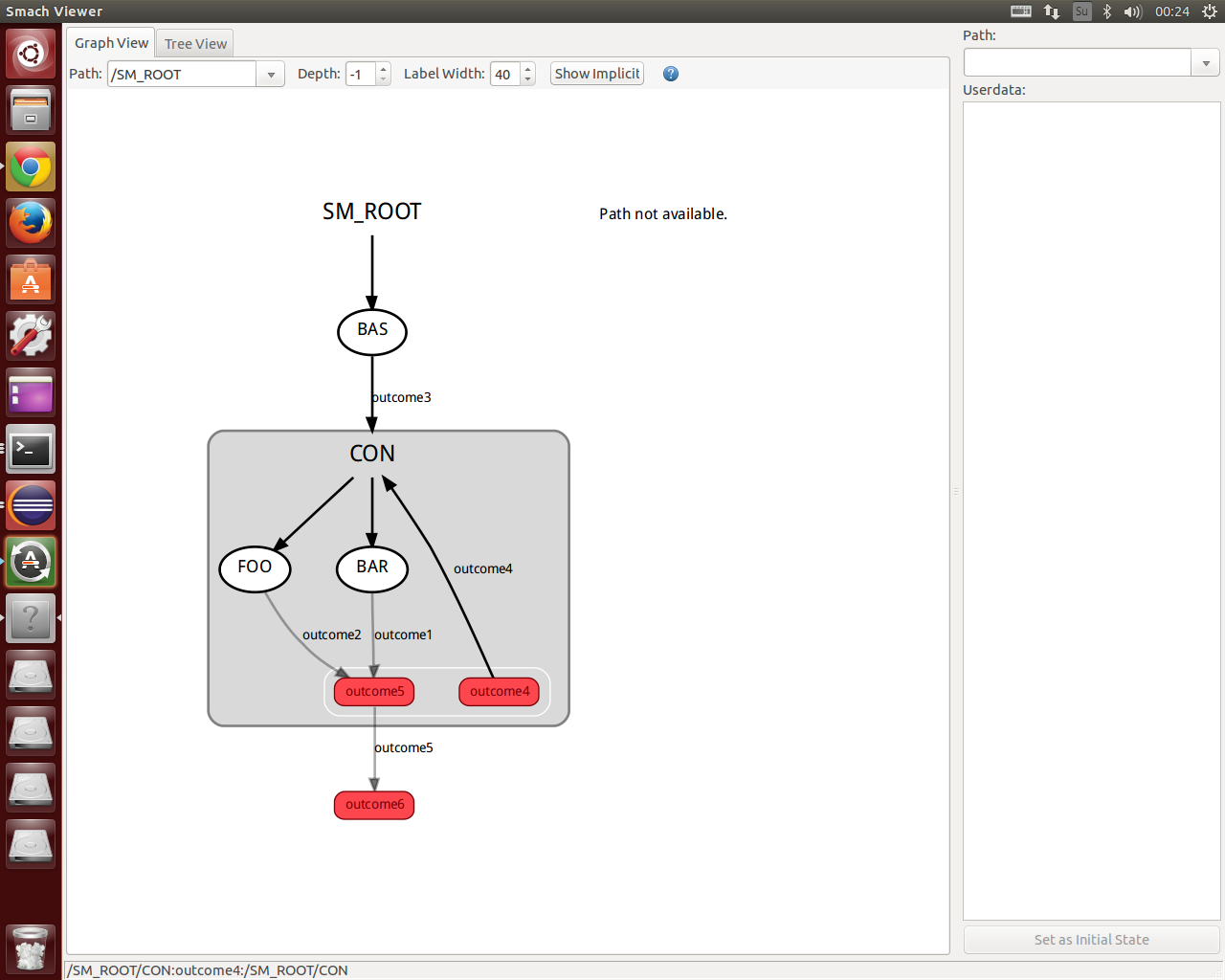
Concurrent状态机是一种同时执行多个状态的状态机。如下图所示。状态FOO和BAR同时执行,当两个状态输出的结果同时满足一个组合条件时(FOO输出outcome2,BAR输出outcome1)才会映射到状态CON的输出结果outcome4。
1、简单例子
具体地,实现代码如下:
#!/usr/bin/env python
import roslib; roslib.load_manifest('smach_example')
import time
import rospy
import smach
import smach_ros
# define state Foo
class Foo(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome1','outcome2'])
self.counter = 0
def execute(self, userdata):
rospy.loginfo('Executing state FOO')
time.sleep(1)
if self.counter < 5:
self.counter += 1
return 'outcome1'
else:
return 'outcome2'
# define state Bar
class Bar(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome1'])
def execute(self, userdata):
time.sleep(1)
rospy.loginfo('Executing state BAR')
return 'outcome1'
# define state Bas
class Bas(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome3'])
def execute(self, userdata):
rospy.loginfo('Executing state BAS')
return 'outcome3'
def main():
rospy.init_node('smach_example_state_machine')
# Create the top level SMACH state machine
sm_top = smach.StateMachine(outcomes=['outcome6'])
# Open the container
with sm_top:
smach.StateMachine.add('BAS', Bas(),
transitions={'outcome3':'CON'})
# Create the sub SMACH state machine
sm_con = smach.Concurrence(outcomes=['outcome4','outcome5'],
default_outcome='outcome4',
outcome_map={'outcome5':
{ 'FOO':'outcome2',
'BAR':'outcome1'}})
# Open the container
with sm_con:
# Add states to the container
smach.Concurrence.add('FOO', Foo())
smach.Concurrence.add('BAR', Bar())
smach.StateMachine.add('CON', sm_con,
transitions={'outcome4':'CON',
'outcome5':'outcome6'})
# Create and start the introspection server
sis = smach_ros.IntrospectionServer('server_name', sm_top, '/SM_ROOT')
sis.start()
# Execute SMACH plan
outcome = sm_top.execute()
rospy.spin()
sis.stop()
if __name__ == '__main__':
main()
2、复杂例子
定义复杂的输出结果条件判断,需要实现两个回调函数,如下代码的156行child_term_cb,178行的out_cb两个回调函数,具体说明,请参考代码处的文字解释。
实现代码如下:
#!/usr/bin/env python import roslib;
import time
import rospy
import smach
import smach_ros
from twisted.internet.defer import succeed # define state Bas
class Bas(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded']) def execute(self, userdata):
time.sleep(4)
rospy.loginfo('Executing state BAS')
return 'succeeded' # define state Foo
class Foo(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded','preempted','aborted'])
self.counter = 0 def execute(self, userdata):
rospy.loginfo('Executing state FOO')
time.sleep(1)
print "counter:%d"%(self.counter)
if self.counter < 5:
self.counter += 1
time.sleep(3)
return 'succeeded'
else:
return 'aborted' # define state Bar1
class Bar1(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded','preempted','aborted'])
self.task_name = 'task_bar1'
def execute(self, userdata):
if self.preempt_requested():#如果暂停,则返回暂停状态
rospy.loginfo("Preempting %s"%(self.task_name))
self.recall_preempt()#唤醒,终止暂停
return 'preempted'
time.sleep(5)
rospy.loginfo('Executing state BAR1')
return 'succeeded' # define state Bar2
class Bar2(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded','preempted','aborted'])
self.task_name ='bar2'
def execute(self, userdata):
if self.preempt_requested():#如果暂停,则返回暂停状态
rospy.loginfo("Preempting %s"%(self.task_name))
self.recall_preempt()#唤醒,终止暂停
return 'preempted'
time.sleep(5)
rospy.loginfo('Executing state BAR2')
return 'succeeded' # define state Bar3
class Bar3(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded','preempted','aborted'])
self.task_name = 'task_bar3'
def execute(self, userdata):
if self.preempt_requested():#如果暂停,则返回暂停状态
rospy.loginfo("Preempting %s"%(self.task_name))
self.recall_preempt()#唤醒,终止暂停
return 'preempted'
time.sleep(5)
rospy.loginfo('Executing state BAR3')
return 'succeeded' # define state Charge
class Charge(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['succeeded']) def execute(self, userdata):
time.sleep(5)
rospy.loginfo('Executing state BAS')
return 'succeeded' class ConcurrentExample:
def __init__(self):
rospy.init_node('smach_example_state_machine') self.last_bar_state = None
# Create the top level SMACH state machine
self.sm_top = smach.StateMachine(outcomes=['stop']) # Open the container
with self.sm_top: smach.StateMachine.add('BAS', Bas(),
transitions={'succeeded':'CON'}) # Create the sub SMACH state machine
self.sm_con = smach.Concurrence(outcomes=['succeeded','preempted','aborted'],
default_outcome='aborted',
#outcome_map = {'succeeded':{'FOO':'succeeded'},
# 'aborted':{'FOO':'aborted'}},
child_termination_cb = self.child_term_cb,
outcome_cb = self.out_cb
) # Open the container
with self.sm_con:
# Add states to the container
smach.Concurrence.add('FOO', Foo()) self.sm_bar = smach.StateMachine(outcomes=['succeeded','preempted','aborted'])
with self.sm_bar:
smach.StateMachine.add('BAR1',Bar1(),
transitions={'succeeded':'BAR2','preempted':'preempted'})
smach.StateMachine.add('BAR2',Bar2(),
transitions={'succeeded':'BAR3','preempted':'preempted'})
smach.StateMachine.add('BAR3',Bar3(),
transitions={'succeeded':'succeeded','preempted':'preempted'})
self.sm_bar.register_transition_cb(self.bar_transition_cb, cb_args=[])
smach.Concurrence.add('BAR', self.sm_bar) smach.StateMachine.add('CON', self.sm_con,
transitions={'succeeded':'stop',
'aborted':'stop',
'preempted':'CHARGE'}) smach.StateMachine.add('CHARGE', Charge(),
transitions={'succeeded':'CON'}) # Create and start the introspection server
sis = smach_ros.IntrospectionServer('server_name', self.sm_top, '/SM_ROOT')
sis.start() # Execute SMACH plan
outcome = self.sm_top.execute()
rospy.spin()
sis.stop() #状态之间转换的时候会调用该函数。比如BAR1转换到BAR2(或者BAR2转换到BAR3)后,执行该回调函数,
#那么活动的状态 active_states 是‘BAR2‘(‘BAR3‘)
def bar_transition_cb(self, userdata, active_states, *cb_args):
print active_states # 注意这里是字符串,活动状态的标识符例如‘BAR’
self.last_bar_state = active_states # gets called when ANY child state terminates,
# 只要Concurent下的其中一个状态完成,都会出发该回调函数
def child_term_cb(self, outcome_map): # terminate all running states if FOO preempted with outcome 'succeeded'
if outcome_map['FOO'] == 'succeeded':
print "child_term_cv:FOO finished"
if self.last_bar_state is not None: self.sm_bar.set_initial_state(self.last_bar_state, smach.UserData())
return True # terminate all running states if BAR preempted
if outcome_map['BAR']=='succeeded' or outcome_map['BAR']=='preempted':
print "child_term_cv:SM_BAR finished" return True # in all other case, just keep running, don't terminate anything
return False # gets called when ALL child states are terminated,只要Concurrent下的状态都结束了,
#调用该函数.注意不是BAR下面的BAR1,BAR2,BAR3的之一完成
def out_cb(self, outcome_map):
if outcome_map['FOO'] == 'aborted':
print "out_cb FOO aborted"
return 'aborted'
elif outcome_map['BAR'] == 'preempted': print "out_cb BAR preempted"
return 'preempted'
elif outcome_map['BAR'] == 'succeeded':
print "out_cb_BAR succeeded"
return 'succeeded'
if __name__ == '__main__':
ConcurrentExample()
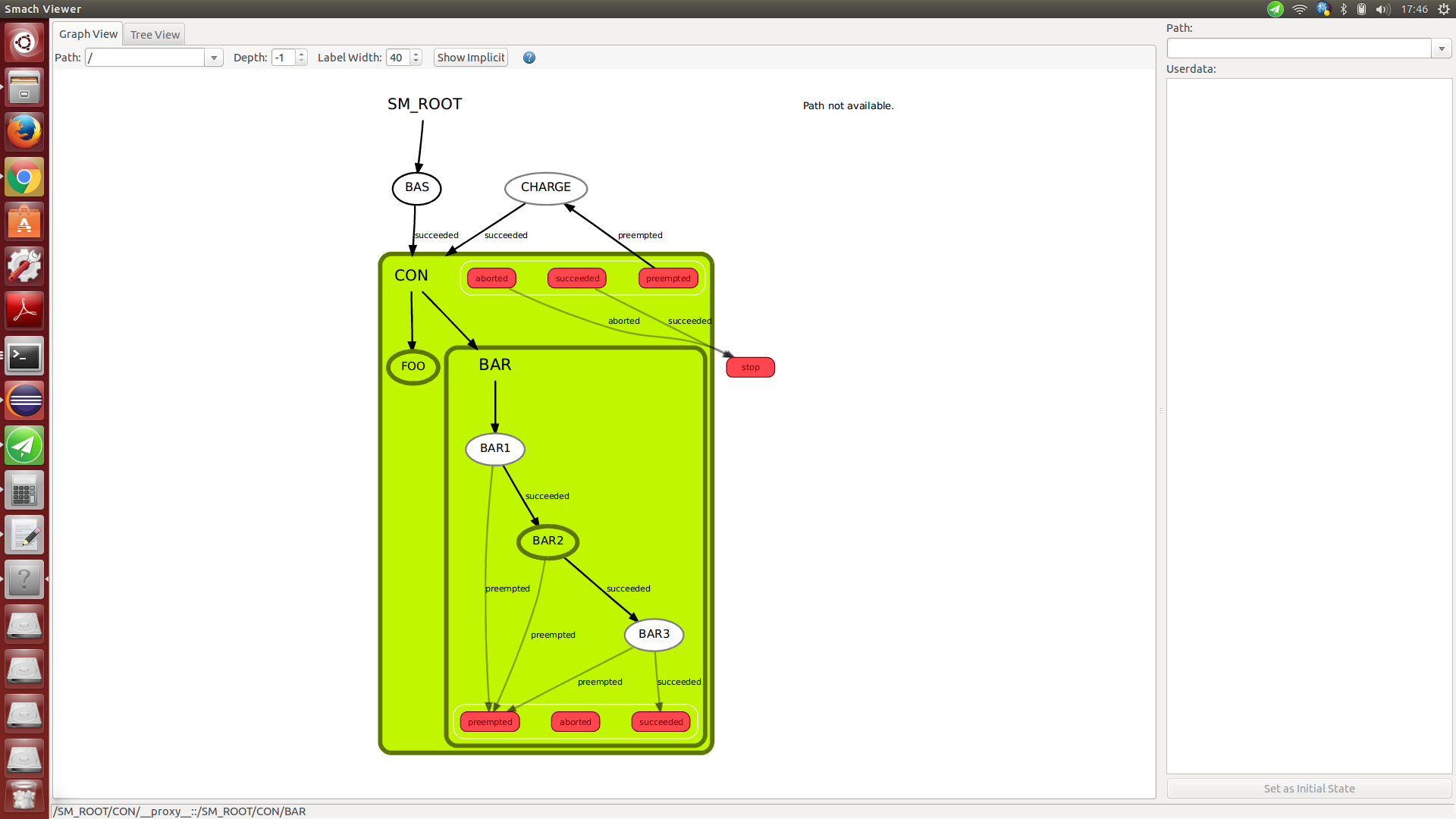
状态机器效果图,CON下的FOO和BAR同时执行,如下所示:
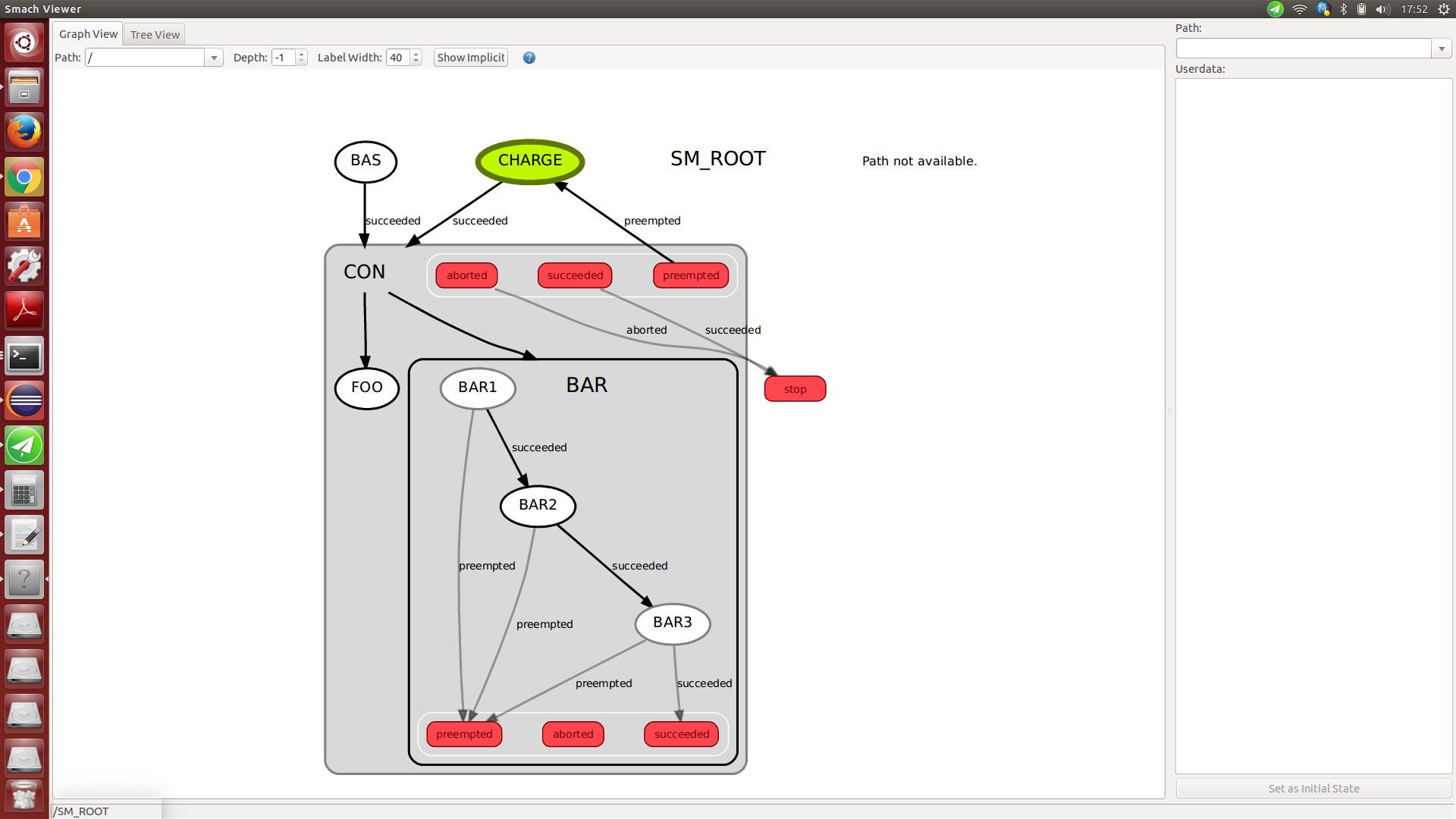
CON进入暂停状态,切换到CHARGE状态下执行(绿色表示执行):
参考资料:
[1]. http://wiki.ros.org/smach/Tutorials/Concurrent%20States
[2]. ros_by_example_vol2_indigo.pdf
问题:只要BAR或FOO之一结束,就输出相应打结果,这个如何做到?还没找到方法
SMACH专题(二)----Concurrent状态机的更多相关文章
- 【算法系列学习三】[kuangbin带你飞]专题二 搜索进阶 之 A-Eight 反向bfs打表和康拓展开
[kuangbin带你飞]专题二 搜索进阶 之 A-Eight 这是一道经典的八数码问题.首先,简单介绍一下八数码问题: 八数码问题也称为九宫问题.在3×3的棋盘,摆有八个棋子,每个棋子上标有1至8的 ...
- 「kuangbin带你飞」专题二十 斜率DP
layout: post title: 「kuangbin带你飞」专题二十 斜率DP author: "luowentaoaa" catalog: true tags: mathj ...
- 「kuangbin带你飞」专题二十二 区间DP
layout: post title: 「kuangbin带你飞」专题二十二 区间DP author: "luowentaoaa" catalog: true tags: - ku ...
- UI标签库专题二:JEECG智能开发平台Column(列) 子标签
UI标签库专题二:JEECG智能开发平台Column(列) 子标签 1.1. Column(列) 子标签 1.1.1. 演示样例 <t:dgCol title="年龄" ...
- 开发指南专题二:JEECG微云高速开发平台JEECG框架初探
开发指南专题二:JEECG微云高速开发平台JEECG框架初探 2.JEECG框架初探 2.1演示系统 打开浏览器输入JEECG演示环境界址:http://demo.jeecg.org:8090/能够看 ...
- SQL语句复习【专题二】
SQL语句复习[专题二] 单行函数(日期.数学.字符串.通用函数.转换函数)多行函数.分组函数.多行数据计算一个结果.一共5个.sum(),avg(),max(),min(),count()分组函数 ...
- SpringBoot之WEB开发-专题二
SpringBoot之WEB开发-专题二 三.Web开发 3.1.静态资源访问 在我们开发Web应用的时候,需要引用大量的js.css.图片等静态资源. 默认配置 Spring Boot默认提供静态资 ...
- [.NET领域驱动设计实战系列]专题二:结合领域驱动设计的面向服务架构来搭建网上书店
一.前言 在前面专题一中,我已经介绍了我写这系列文章的初衷了.由于dax.net中的DDD框架和Byteart Retail案例并没有对其形成过程做一步步分析,而是把整个DDD的实现案例展现给我们,这 ...
- [你必须知道的NOSQL系列]专题二:Redis快速入门
一.前言 在前一篇博文介绍了MongoDB基本操作,本来打算这篇博文继续介绍MongoDB的相关内容的,例如索引,主从备份等内容的,但是发现这些内容都可以通过官方文档都可以看到,并且都非常详细,所以这 ...
随机推荐
- haproxy支持的负载均衡算法详解
目前haproxy支持的负载均衡算法有如下8种: 1.roundrobin 表示简单的轮询,每个服务器根据权重轮流使用,在服务器的处理时间平均分配的情况下这是最流畅和公平的算法.该算法是动态的,对于实 ...
- 利用mysql的binlog恢复数据
MySQL Binary Log也就是常说的bin-log, ,是mysql执行改动产生的二进制日志文件,其主要作用有两个: * 数据回复 * 主从数据库.用于slave端执行增删改,保持与maste ...
- C# 托管资源 与 非托管资源
C# 托管资源 与 非托管资源 托管资源一般是指被CLR控制的内存资源,这些资源的管理可以由CLR来控制,.NET可以自动进行回收,主要是指托管堆上分配的内存资源.例如程序中分配的对象,作用域内的变量 ...
- HDU 1054 Strategic Game(最小路径覆盖)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1054 题目大意:给你一棵树,选取树上最少的节点使得可以覆盖整棵树. 解题思路: 首先树肯定是二分图,因 ...
- MyBatis的动态插入语句(经常报‘无效的列类型’)
最近在工作中经常遇到一个情况:通过mybatis的标签执行插入语句,当表中字段比较多的时候,需要全部插入,而有时候的需求是只插入其中几个字段,但是会报错. 原来的语句,必须把所有字段都Set值. &l ...
- 【LOJ】#2562. 「SDOI2018」战略游戏
题解 圆方树建好之后点是原来的两倍,而st表求lca也要开到点的两倍,所以是四倍 我并没有开小,然而= =,我的预处理log2,写成了200000,而不是400000 我是不是折翼啊= = 很可写,我 ...
- shell心得
向loader.ctl中插入文本
- poj1847 Tram(Dijkstra || Floyd || SPFA)
题目链接 http://poj.org/problem?id=1847 题意 有n个车站,编号1~n,每个车站有k个出口,车站的出口默认是k个出口中的第一个,如果不想从默认出口出站,则需要手动选择出站 ...
- UBB/HTML互相转换简单实现源码一览
查看源码,主要用的就是正则匹配,多的不说,直接读码. 资源原地址:在线UBB/HTML转换 效果图如下 以下源码: <!DOCTYPE html> <html lang=" ...
- Bootstrap入门八:图片
1.响应式图片 在 Bootstrap 版本 3 中,通过为图片添加 .img-responsive 类可以让图片支持响应式布局.其实质是为图片设置了 max-width: 100%;. height ...