Sobel 边缘检测算子
转自:http://blog.csdn.net/xiaqunfeng123/article/details/17302003
Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。
图像边缘,相素值会发生显著的变化了。表示这一改变的一个方法是使用 导数 。 梯度值的大变预示着图像中内容的显著变化。用更加形象的图像来解释,假设我们有一张一维图形。下图2中灰度值的”跃升”表示边缘的存在,图3中使用一阶微分求导我们可以更加清晰的看到边缘”跃升”的存在。

图1、lena.jpg
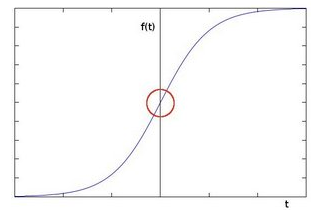
图2、像素一维图形
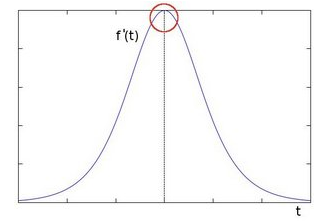
图3、一阶导数
具体是采用卷积的计算方法实现的。假设被作用的图像为 ,在两个方向上求导:
,在两个方向上求导:
水平变化求导:将 与一个奇数大小的内核  进行卷积。比如,当内核大小为3时, 的计算结果为图4a:
进行卷积。比如,当内核大小为3时, 的计算结果为图4a:
垂直变化求导:将 I 与一个奇数大小的内核  进行卷积。比如,当内核大小为3时, 的计算结果为图4b:
进行卷积。比如,当内核大小为3时, 的计算结果为图4b:
在图像的每一点,结合以上两个结果求出近似 梯度 ,如图4c:
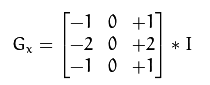
图4a
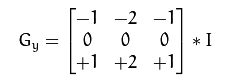
图4b
图4c
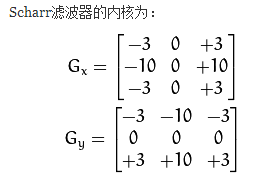
因为Sobel算子只是求取了导数的近似值,当内核大小为 时,以上Sobel内核可能产生比较明显的误差。为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核,该函数的运算与Sobel函数一样快,但结果却更加精确。
时,以上Sobel内核可能产生比较明显的误差。为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核,该函数的运算与Sobel函数一样快,但结果却更加精确。
两种实现版本:
C 版本:
cvSobel ( const cvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size =3 )
src, dst 分别是源图像和目标图像,xorder ,yorder – 分别为x,y方向导数运算参数,可取0,1,2 。aperture_size是方形滤波器的宽,是小于7的奇数。
具体见《Learning OpenCV》那本书,P.170页
下面是代码,比较简单:
#include <highgui.h>
#include <cv.h> using namespace cv;
using namespace std; int main(int argc, char ** argv)
{
IplImage* src, *dstx,*dsty,*dst; src = cvLoadImage( "car.png", );
dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, );
dstx = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, );
dsty = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, ); cvNamedWindow( "src" );
cvNamedWindow( "sobel" ); cvShowImage( "src", src ); cvSobel( src, dstx, , , ); //sobel
cvSobel( src, dsty, , , );
cvAddWeighted(dstx,0.5,dsty,0.5,,dst); cvShowImage( "sobel", dst ); cvWaitKey();
cvReleaseImage( &src );
cvReleaseImage( &dst ); return ;
}
效果图:

C++版本:
先来看一下C++下 Sobel 的定义
C++: void Sobel( InputArray src , OutputArray dst, int ddepth, int dx, int dy, int ksize=3,
double scale=1,double delta=0,intborderType=BORDER_DEFAULT )
各参数的意义如下:
src – 输入图像。dst – 输出图像,与输入图像同样大小,拥有同样个数的通道。
ddepth –输出图片深度;下面是输入图像支持深度和输出图像支持深度的关系:
src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F
src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_64F, ddepth = -1/CV_64F
当 ddepth为-1时, 输出图像将和输入图像有相同的深度。输入8位图像则会截取顶端的导数。
xorder – x方向导数运算参数。yorder – y方向导数运算参数。
ksize – Sobel内核的大小,可以是:1,3,5,7。 注意:只可以是小于7 的奇数
scale – 可选的缩放导数的比例常数。delta – 可选的增量常数被叠加到导数中。borderType – 用于判断图像边界的模式。
下面是程序:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h> using namespace cv;
using namespace std; int main( int argc, char** argv )
{
Mat src, src_gray;
Mat grad;
char* window_name = "求解梯度";
int scale = ;
int delta = ;
int ddepth = CV_16S; src = imread( "car.png" );
if( !src.data )
{
return -;
}
//高斯模糊
GaussianBlur( src, src, Size(,), , , BORDER_DEFAULT );
//转成灰度图
cvtColor( src, src_gray,CV_RGB2GRAY ); namedWindow( window_name, CV_WINDOW_AUTOSIZE ); Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
//x方向梯度计算
Sobel( src_gray, grad_x, ddepth, , , , scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_x, abs_grad_x );
//y方向梯度计算
Sobel( src_gray, grad_y, ddepth, , , , scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_y, abs_grad_y );
//加权和
addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, , grad ); imshow( window_name, grad ); waitKey();
return ;
}
如果要用Scharr滤波器的话,把Sobel那行代码替换掉就好了:
Scharr( src_gray, grad_x, ddepth, , , scale, delta, BORDER_DEFAULT );
Scharr( src_gray, grad_x, ddepth, , , scale, delta, BORDER_DEFAULT );
效果图:


参考资料:http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/sobel_derivatives/sobel_derivatives.html
转载请注明出处:http://blog.csdn.net/xiaqunfeng123
Sobel 边缘检测算子的更多相关文章
- 边缘检测算子和小波变换提取图像边缘【matlab】
Roberts边缘检测算子:根据一对互相垂直方向上的差分可用来计算梯度的原理,采用对角线方向相邻两像素之差. 小波变换的方法比较适用于展现夹带在正常信号中的瞬间反常现象,具有方向敏感性.所以可以边缘检 ...
- 边缘检测之Sobel检测算子
在讨论边缘算子之前,首先给出一些术语的定义: (1)边缘:灰度或结构等信息的突变处,边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像. (2)边缘点:图像中具有坐标[x,y],且处在 ...
- 各种边缘检测算子特点比较(canny)
canny 最好.但是容易把噪点误判为边界.sobel prewitt log 效果差不多.prewitt比sobel 去噪效果好.roberts马马虎虎.适合什么图片那得看图片的噪点情况,一般can ...
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
- Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110 索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰 ...
- OpenCV图像处理篇之边缘检测算子
OpenCV图像处理篇之边缘检测算子 转载: http://xiahouzuoxin.github.io/notes/ 3种边缘检测算子 一阶导数的梯度算子 高斯拉普拉斯算子 Canny算子 Open ...
- ###Canny边缘检测算子
开源中国. #@date: 2014-06-20 #@author: gerui #@email: forgerui@gmail.com 一.一阶微分边缘算子 1. 一阶微分边缘检测算子也称梯度边缘算 ...
- 数字图像处理之sobel边缘检测
在前两部文章介绍了几种边缘检测算法,和位图的内存结构.如果对前两篇文章已经理解透彻 了,那么本文将带你进入数字图像处理的世界. 本文通过C代码实现基本的sobel边缘检测,包括8个方向和垂直方向: 代 ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
随机推荐
- LeetCode算法题-Sum of Square Numbers(Java实现)
这是悦乐书的第276次更新,第292篇原创 01 看题和准备 今天介绍的是LeetCode算法题中Easy级别的第144题(顺位题号是633).给定一个非负整数c,判断是否存在两个整数a和b,使得a的 ...
- Linux Collection:软件配置
PAS Debian 9安装最新版Firefox( Firefox 58+/Quantum) Debian 9(Strech)的仓库包含的是firefox-esr(52)版本:需要安装最新版,有如下两 ...
- Spark中的一些概念
最近工作用到Spark,这里记一些自己接触到的Spark基本概念和知识. 本文链接:https://www.cnblogs.com/hhelibeb/p/10288915.html 名词 RDD:在高 ...
- SystemTap Beginners Guide
SystemTap 3.0 SystemTap Beginners Guide Introduction to SystemTap Edition 3.0 Red Hat, Inc. Don Do ...
- mysql中group by和order by混用 结果不是理想结果(转)
文章转自 https://www.cnblogs.com/myphper/p/3767572.html 在使用mysql排序的时候会想到按照降序分组来获得一组数据,而使用order by往往得到的不是 ...
- 基于C#的钉钉SDK开发(1)--对官方SDK的重构优化
在前段时间,接触一个很喜欢钉钉并且已在内部场景广泛使用钉钉进行工厂内部管理的客户,如钉钉考勤.日常审批.钉钉投影.钉钉门禁等等方面,才体会到原来钉钉已经已经在企业上可以用的很广泛的,因此回过头来学习研 ...
- Golang常见误区(一)
1.左大括号一般不能单独一行 在其他大多数语言中,{ 的位置你自行决定.Go 比较特别,遵守分号注入规则(automatic semicolon injection):编译器会在每行代码尾部特定分隔符 ...
- jQuery对象与DOM对象之间的转换(转)
原文:https://www.cnblogs.com/lsy0403/p/5907084.html 什么是DOM对象 使用JavaScript中的方法获取页面中的元素返回的对象就是dom对象.比如使用 ...
- PS绘制飘逸彩色丝带教程
一.新建一个大小适当的图像,点击工具栏上的钢笔工具,使用形状图层来绘制出下图的形状. 二.把形状所在层的填充设为0%,填充设成0是不会影响到图层的,不像不透明度那样会影响图层样式的效果. 三.双击丝带 ...
- 采用VSPD、ModbusTool模拟串口、MODBUS TCP设备进行Python采集软件开发
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 不少仪器/设备都提供了数据采集的接口,其中不少是串口或网络的MODBUS/TCP协议. 串口是比较简单 ...