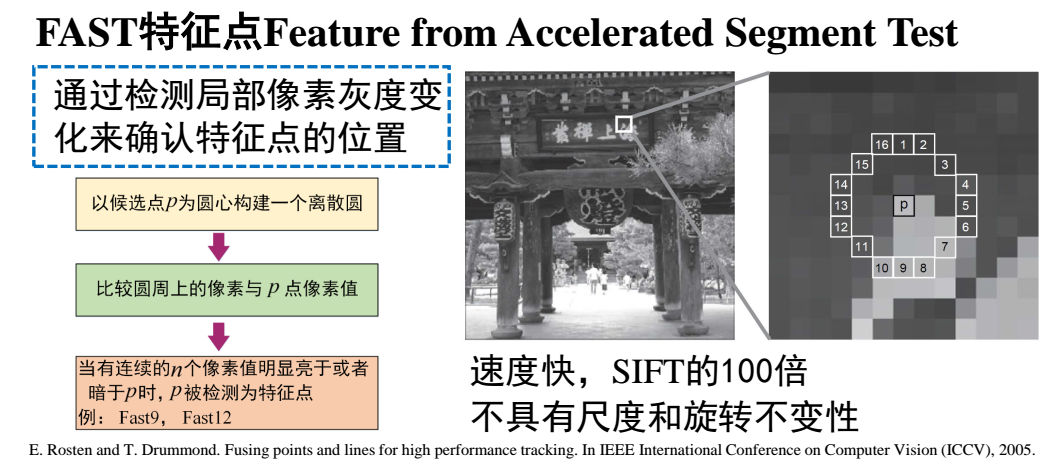
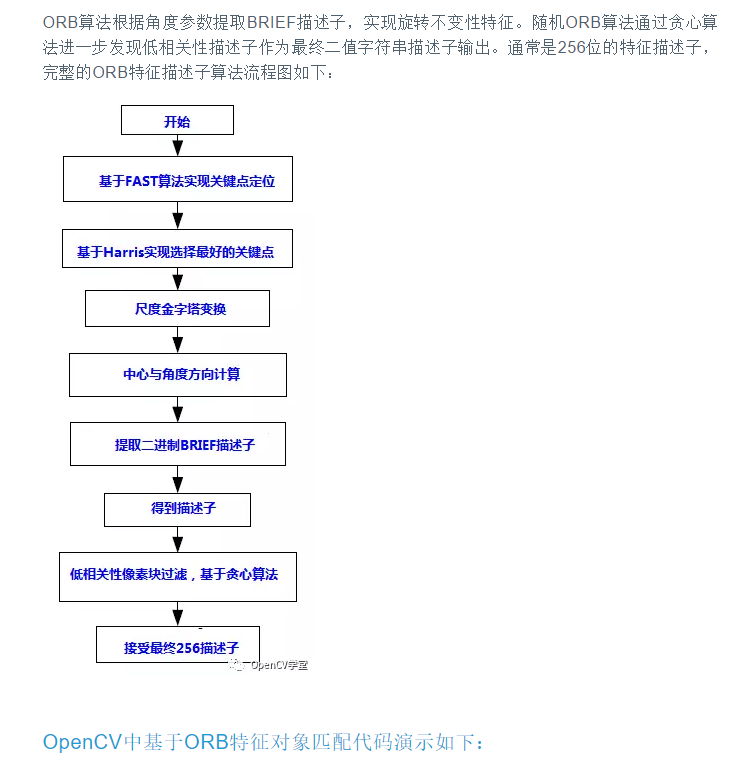
OpenCV——ORB特征检测与匹配
原文链接:https://mp.weixin.qq.com/s/S4b1OGjRWX1kktefyHAo8A

#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <iostream> using namespace cv;
using namespace cv::xfeatures2d;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("test.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); // ORB特征点检测
int minHessian = ;
Ptr<ORB> detector = ORB::create(minHessian);//和surf的区别:只是SURF→ORB
vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());//找出关键点 // 绘制关键点
Mat keypoint_img;
drawKeypoints(src, keypoints, keypoint_img, Scalar::all(-), DrawMatchesFlags::DEFAULT);
imshow("KeyPoints Image", keypoint_img); waitKey();
return ;
}
匹配
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
#define RATIO 0.4
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat box = imread("2.png");
Mat scene = imread("数字.jpg");
if (scene.empty()) {
printf("could not load image...\n");
return -;
}
imshow("input image", scene);
vector<KeyPoint> keypoints_obj, keypoints_sence;
Mat descriptors_box, descriptors_sence;
Ptr<ORB> detector = ORB::create();
detector->detectAndCompute(scene, Mat(), keypoints_sence, descriptors_sence);
detector->detectAndCompute(box, Mat(), keypoints_obj, descriptors_box);
vector<DMatch> matches;
// 初始化flann匹配
// Ptr<FlannBasedMatcher> matcher = FlannBasedMatcher::create(); // default is bad, using local sensitive hash(LSH)
Ptr<DescriptorMatcher> matcher = makePtr<FlannBasedMatcher>(makePtr<flann::LshIndexParams>(, , ));
matcher->match(descriptors_box, descriptors_sence, matches);
// 发现匹配
vector<DMatch> goodMatches;
printf("total match points : %d\n", matches.size());
float maxdist = ;
for (unsigned int i = ; i < matches.size(); ++i) {
printf("dist : %.2f \n", matches[i].distance);
maxdist = max(maxdist, matches[i].distance);
}
for (unsigned int i = ; i < matches.size(); ++i) {
if (matches[i].distance < maxdist*RATIO)
goodMatches.push_back(matches[i]);
}
Mat dst;
drawMatches(box, keypoints_obj, scene, keypoints_sence, goodMatches, dst);
imshow("output", dst);
waitKey();
return ;
}
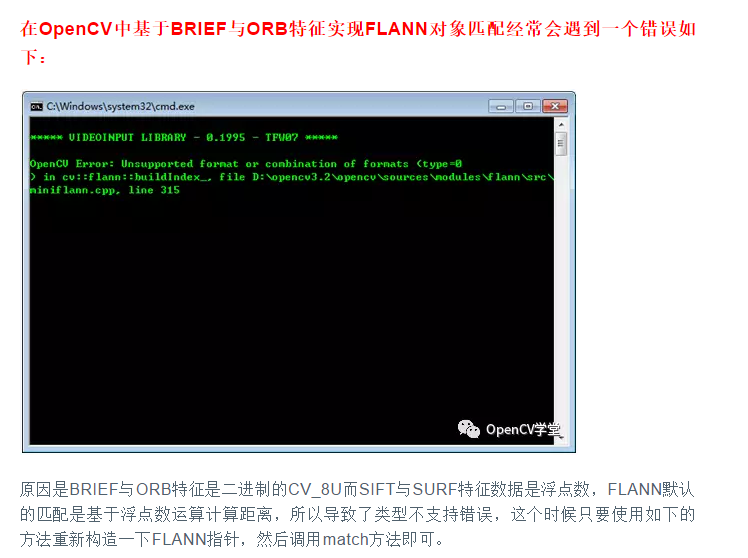
Ptr<DescriptorMatcher> matcher = makePtr<FlannBasedMatcher>
(makePtr<flann::LshIndexParams>(, , ));
OpenCV——ORB特征检测与匹配的更多相关文章
- OpenCV——SIFT特征检测与匹配
SIFT特征和SURF特征比较 比较项目 SIFT SURF 尺度空间极值检测 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积 ...
- OpenCV——Brisk特征检测、匹配与对象查找
检测并绘制特征点: #include <opencv2/opencv.hpp> #include <opencv2/xfeatures2d.hpp> #include < ...
- OpenCV——SURF特征检测、匹配与对象查找
SURF原理详解:https://wenku.baidu.com/view/2f1e4d8ef705cc1754270945.html SURF算法工作原理 选择图像中的POI(Points of i ...
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标
模板匹配是一种在图像中定位目标的方法,通过把输入图像在实际图像上逐像素点滑动,计算特征相似性,以此来判断当前滑块图像所在位置是目标图像的概率. 在Opencv中,模板匹配定义了6种相似性对比方式: C ...
- 《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到. 看 ...
- OpenCV——KAZE、AKAZE特征检测、匹配与对象查找
AKAZE是KAZE的加速版 特征点查找和绘制:把surf中的surf改成KAZE或AKAZE即可 #include <opencv2/opencv.hpp> #include < ...
- [opencv]KAZE、AKAZE特征检测、匹配与对象查找
AkAZE是KAZE的加速版 与SIFT,SUFR比较: 1.更加稳定 2.非线性尺度空间 3.AKAZE速度更加快 4.比较新的算法,只有Opencv新的版本才可以用 AKAZE局部匹配介绍 1.A ...
- OpenCV 之 特征检测
特征,也称 兴趣点 或 关键点,如下:蓝框内区域平坦,无特征:黑框内有"边缘",红框内有"角点",后二者都可视为"特征" 角点作为一种特征, ...
- OpenCV特征点检测匹配图像-----添加包围盒
最终效果: 其实这个小功能非常有用,甚至加上只有给人感觉好像人脸检测,目标检测直接成了demo了,主要代码如下: // localize the object std::vector<Point ...
随机推荐
- Spring全家桶系列–SpringBoot与Mybatis结合
//本文作者:cuifuan Mybatis 是一个持久层ORM框架,负责Java与数据库数据交互,也可以简易理解为中介,相对于它,还有个中介是hibernate,不过在mybatis中sql语句的灵 ...
- django-xss攻击原理与防范
一.跨站脚本攻击(XSS) XSS是一种经常出现在web应用中的计算机安全漏洞,它允许恶意web用户将代码植入到提供给其它用户使用的页面中.也属一种注入攻击,注入本质上就是把输入的数据变成可执行的程序 ...
- vue.js关于路由的跳转
1.路由demo示例 <div id="app"> <h1>Hello App!</h1> <p> <!-- 使用 route ...
- influxdb-1.7.2.x86_64安装 install influxdb-1.7.2.x86_64 on RedHat & CentOS
1.下载安装 wget http://dl.influxdata.com/influxdb/releases/influxdb-1.7.2.x86_64.rpm https://portal.infl ...
- 从零开始学习html(十四)单位和值
一.颜色值 <!DOCTYPE HTML> <html> <head> <meta charset="utf-8"> <tit ...
- innerHTML在ie9有部分无法添加
在高版本的浏览器,innerHTML就如正常时候,里面可以套任何字符串,但是在ie9下,innerHTML不能是table ,tr td等标签字符串,解决方法如下: 在table添加一个tr var ...
- 如何删除PeopleSoft Process Definition
PeopleSoft没有在页面提供删除Process Definition的快捷方式. 可以通过AD创建一个新的project加入这个process definition,在upgrade tab选择 ...
- 浅尝Java(一)
主题:数据类型,数值类型变量相互转化 Java是强类型的语言,与JavaScript(松散型)在数据类型上有很大的差异(1.所有变量必须先申明,后使用:2.指定类型的变量只接受与之匹配类型的值).这个 ...
- 常用内置方法之:__str__,__repr__
class Test(object): def __init__(self): pass def __str__(self): return "test" test = Test( ...
- memcached编译安装报错 ,提示checking build system type... Invalid configuration `x86_64-unknown-linux-': machine `x86_64-unknown-linux' not recognized configure: error: /bin/sh ./config.sub x86_64-unknown-linu