论文解读(PAWS)《Semi-Supervised Learning of Visual Features by Non-Parametrically Predicting View Assignments with Support Samples》
论文信息
论文标题:Semi-Supervised Learning of Visual Features by Non-Parametrically Predicting View Assignments with Support Samples
论文作者:Mahmoud Assran, Mathilde Caron, Ishan Misra, Piotr Bojanowski, Armand Joulin, Nicolas Ballas
论文来源:NeurIPS 2021
论文地址:download
论文代码:download
视屏讲解:click
1 介绍
提出问题:充分利用无标注目标;
解决办法:对无标注数据使用一种可信的伪标签策略;
2 方法
2.1 整体框架
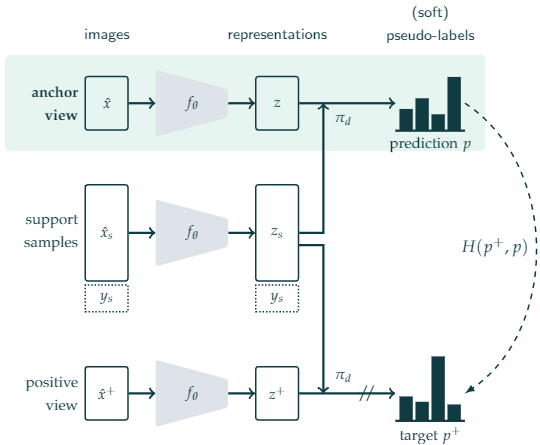
2.2 问题定义
We consider a large dataset of unlabeled images $\mathcal{D}= \left(\mathrm{x}_{i}\right)_{i \in[1, N]}$ and a small support dataset of annotated images $\mathcal{S}=\left(\mathbf{x}_{s i}, y_{i}\right)_{i \in[1, M]}$ , with $M \ll N $.Our goal is to learn image representations by leveraging both $\mathcal{D}$ and $\mathcal{S}$ during pretraining. After pre-training with $\mathcal{D}$ and $\mathcal{S}$ , we fine-tune the learned representations using only the labeled set $\mathcal{S}$ .
2.3 相似度分类器
公式:
$\pi_{d}\left(z_{i}, \mathbf{z}_{\mathcal{S}}\right)=\sum_{\left(z_{s_{j}}, y_{j}\right) \in \mathbf{z}_{\mathcal{S}}}\left(\frac{d\left(z_{i}, z_{s j}\right)}{\sum_{z_{s k} \in \mathbf{z}_{\mathcal{S}}} d\left(z_{i}, z_{s k}\right)}\right) y_{j}$
Note:Soft Nearest Neighbours strategy
其中:
$d(a, b) =\exp \left( \frac{a^{T} b}{\|a\|\|b\| \tau} \right)$
简化:
$p_{i}:=\pi_{d}\left(z_{i}, \mathbf{z}_{\mathcal{S}}\right)=\sigma_{\tau}\left(z_{i} \mathbf{z}_{\mathcal{S}}^{\top}\right) \mathbf{y}_{\mathcal{S}}$
Note:$p_{i} \in[0,1]^{K}$
锐化:
$\left[\rho\left(p_{i}\right)\right]_{k}:=\frac{\left[p_{i}\right]_{k}^{1 / T}}{\sum_{j=1}^{K}\left[p_{i}\right]_{j}^{1 / T}}, \quad k=1, \ldots, K$
Note:锐化目标会鼓励网络产生自信的预测,避免模型崩溃问题。
2.4 训练目标
总目标:
$\frac{1}{2 n} \sum_{i=1}^{n}\left(H\left(\rho\left(p_{i}^{+}\right), p_{i}\right)+H\left(\rho\left(p_{i}\right), p_{i}^{+}\right)\right)-H(\bar{p})$
ME-MAX 正则化项:$H(\bar{p})$
其中:
$\bar{p}:=\frac{1}{2 n} \sum_{i=1}^{n}\left(\rho\left(p_{i}\right)+\right. \left.\rho\left(p_{i}^{+}\right)\right) $ 表示所有未标记表示的锐化预测的平均值;
该正则化项在鼓励个体预测有信心的同时,鼓励平均预测接近均匀分布。ME-MAX 正则化项之前已在判别式无监督聚类社区中用于平衡学习的聚类大小[35]。
Note:交叉熵
# Example of target with class indices
loss = nn.CrossEntropyLoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.empty(3, dtype=torch.long).random_(5)
output = loss(input, target)
output.backward()
# Example of target with class probabilities
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5).softmax(dim=1)
output = loss(input, target)
output.backward()
3 总结
略
论文解读(PAWS)《Semi-Supervised Learning of Visual Features by Non-Parametrically Predicting View Assignments with Support Samples》的更多相关文章
- 【论文阅读】Deep Clustering for Unsupervised Learning of Visual Features
文章:Deep Clustering for Unsupervised Learning of Visual Features 作者:Mathilde Caron, Piotr Bojanowski, ...
- 论文解读《Momentum Contrast for Unsupervised Visual Representation Learning》俗称 MoCo
论文题目:<Momentum Contrast for Unsupervised Visual Representation Learning> 论文作者: Kaiming He.Haoq ...
- 论文解读《Deep Resdual Learning for Image Recognition》
总的来说这篇论文提出了ResNet架构,让训练非常深的神经网络(NN)成为了可能. 什么是残差? "残差在数理统计中是指实际观察值与估计值(拟合值)之间的差."如果回归模型正确的话 ...
- 【公式详解】【优秀论文解读】EDPLVO: Efficient Direct Point-Line Visual Odometry
前言 多的不说哈 2022最佳优秀论文 来自美团无人机团队 作者提出了一种使用点和线的高效的直接视觉里程计(visual odometry,VO)算法-- EDPLVO .他们证明了,2D 线上的 3 ...
- 论文解读(SimCLR)《A Simple Framework for Contrastive Learning of Visual Representations》
1 题目 <A Simple Framework for Contrastive Learning of Visual Representations> 作者: Ting Chen, Si ...
- 自监督学习(Self-Supervised Learning)多篇论文解读(下)
自监督学习(Self-Supervised Learning)多篇论文解读(下) 之前的研究思路主要是设计各种各样的pretext任务,比如patch相对位置预测.旋转预测.灰度图片上色.视频帧排序等 ...
- 自监督学习(Self-Supervised Learning)多篇论文解读(上)
自监督学习(Self-Supervised Learning)多篇论文解读(上) 前言 Supervised deep learning由于需要大量标注信息,同时之前大量的研究已经解决了许多问题.所以 ...
- 论文解读(BYOL)《Bootstrap Your Own Latent A New Approach to Self-Supervised Learning》
论文标题:Bootstrap Your Own Latent A New Approach to Self-Supervised Learning 论文方向:图像领域 论文来源:NIPS2020 论文 ...
- 论文笔记之:Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning
论文笔记之:Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning 2017-06-06 21: ...
- Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记
Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记 arXiv 摘要:本文提出了一种 DRL 算法进行单目标跟踪 ...
随机推荐
- 使用TLS/SSL传输层安全机制实现web项目的通信安全
自己的web项目在内网ip访问时,浏览器会提示不安全 原因就是因为没有证书,而传输层的TLS/SSL协议,会告诉我们本地客户端的浏览器,我现在访问的web项目的ip地址可能存在安全风险 要解决这个通信 ...
- python3安装turtle失败问题
失败截图: 解决办法: 1.下载turtle-0.0.2 2.解压文件夹到指定目录 3.打开setup.py找到第四十行修改 4.打开cmd进入turtle-0.0.2所在文件夹的上一层文件夹,执行p ...
- 更改windows powershell默认路径
查看配置文件位置 $profile 修改配置文件 code $profile 加上 Set-Location C:\Users\zzy81\Desktop
- 助教工作总结(高级语言程序设计C语言)
* { font-family: 宋体 } zw { font-size: 20px; line-height: 2em } 一.助教工作的具体职责和任务 在本学期担任陈欣老师的计科专业21级c语 ...
- ssh反向代理树莓派+motion,实现公网远程视频监控
注意:本文公网远程监控部分需要借助有公网IP的云服务器进行ssh反向代理. 一.借助motion实现内网的视频监控 准备 插上摄像头,然后输入ls /dev/video*命令检查是否识别了摄像头 安装 ...
- [Unity移动端]真机调试
一.Android Studio 1.log打印 打开AS,新建一个工程,点击左下角的Logcat,如下图,1是设备(支持模拟器,如果是真机的话,需要usb连接电脑,真机要是usb调试模式),2是包名 ...
- webservice学习随笔(一):简单的webservice实例
一.webService概念简单介绍: 简单来说,webservice就是远程调用技术,也叫XML Web Service WebService是一种可以接收从Internet或者Intranet上的 ...
- Kotlin 基础
Kotlinbase.kt @file:JvmName("kotlinbaseTest") import kotlin.math.roundToInt as atoInt fun ...
- Dcat admin 多文件上传,七牛云云端上传
进入官网 Dcat Admin - Php后台开发框架 这里要选择1.x 下面来安装框架 安装完laravel之后,需要修改.env文件,设置数据库链接设置正确 安装 dcat-admin comp ...
- 声网传输层协议 AUT 的总结与展望丨Dev for Dev 专栏
本文为「Dev for Dev 专栏」系列内容,作者为声网大后端传输协议负责人 夏天. 针对实时互动应用对网络传输带来的新需求和新挑战,声网通过将实时互动中的应用层业务需求与传输策略的分层和解耦,于 ...