yolo进化史之yolov2
yolov1和当时最好的目标检测系统相比,有很多缺点.比如和Fast R-CNN相比,定位错误更多.和基于区域选择的目标检测方法相比,recall也比较低.yolov2的目标即在保证分类准确度的情况下,尽可能地去提高recall和定位精度.
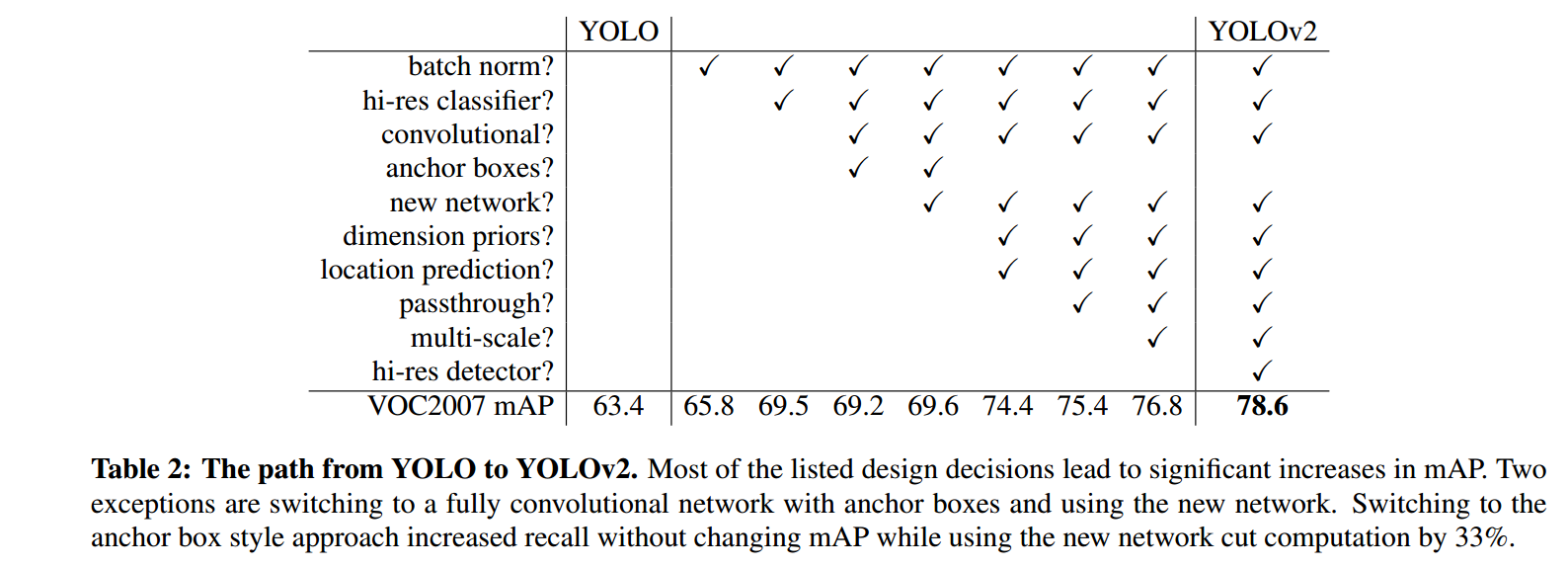
上图是yolo尝试了的方法.
可以看到使得检测精度得到大幅提升的主要就是hi-res classifier和dimension priors && location prediction
Batch Normalization
bn使得mAP提高了2%.并且可以去掉dropout而不带来过拟合.
High Resolution Classifier
yolo可以看成2部分组成,一个是特征提取部分,这部分就是分类网络的全连接层之前的部分. 一个是yolo做预测的部分.
YOLO训练分为两个阶段。首先,我们训练一个像VGG16这样的分类器网络。然后用卷积层替换全连接层,并对其进行端到端的再训练,用于目标检测。yolov1用224 * 224的图片训练分类器,然后用448 * 448的图片做目标检测。 yolov2在用224*224的图片读分类网络做训练以后,再用10个迭代,用448*448的图片去对网络做微调.这样的话,卷积核的参数就可以更好地适应高分辨率的输入,然后用448*448的图片去做检测网络的训练. 此举提高了mAP 4%.
Convolutional With Anchor Boxes
yolov1用全连接层做box的坐标预测. 这个会造成在训练的初始,梯度不够稳定,因为一开始预测的尺寸对某一物体有效,可能对另一物体无效.但是现实世界里,目标的尺寸并不是随机的,所以我们事先聚类好一些anchor box(锚或者叫先验框),依次为基础,去做box坐标预测.
anchor的采用让mAP从69.5掉到了69.2,但是recall从81%上升到了88%.
Using anchor boxes we get a small decrease in accuracy.
YOLO only predicts 98 boxes per image but with anchor
boxes our model predicts more than a thousand. Without
anchor boxes our intermediate model gets 69:5 mAP with a
recall of 81%. With anchor boxes our model gets 69:2 mAP
with a recall of 88%. Even though the mAP decreases, the
increase in recall means that our model has more room to
improve.
论文里,这里让人有点迷惑,其实这里说的anchor box是作者手工选择的box,而不是k-means聚类出来的,采用了k-means聚类的box作为anchor box,把mAP提高了接近5%. 对应于文章开头的图里的dimension priors. 聚类先验框可以参考https://www.cnblogs.com/sdu20112013/p/10937717.html
去除全连接层
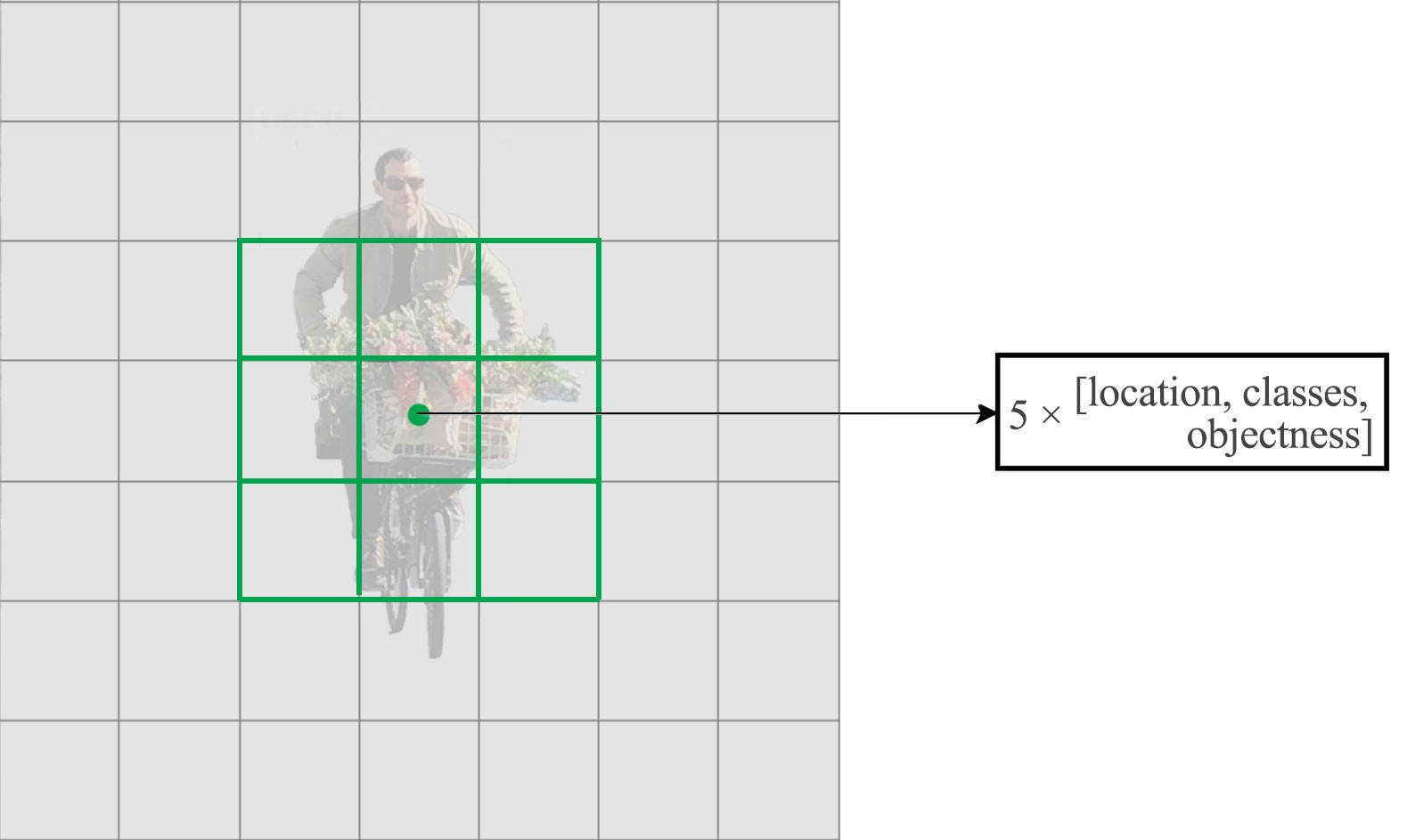
把对class的预测从cell级别调整到针对box.
yolov1每个cell预测出2个box,class个prob. yolov2有5个anchor box.依据每个anchor box预测出(1+4+20)个参数,所以每个cell预测出
5*(1+4+20)=125个参数.
- 图像输入尺寸由448调整到416,同时去掉一个池化层
这样最终得到的feature map的13*13的.
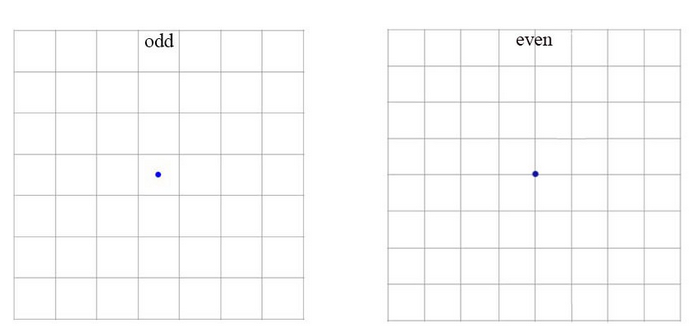
作者认为通常目标位于图片中央,尤其是大目标,所以希望特征图是奇数的,这样就有某一个确定的cell去预测目标而不是用临近的4个cell.
We do this because we want an odd number of
locations in our feature map so there is a single center cell.
Objects, especially large objects, tend to occupy the center
of the image so it’s good to have a single location right at
the center to predict these objects instead of four locations
that are all nearby
- 去掉一个池化层使得最终输出是 13×13 (instead of 7×7).
Direct location prediction
我们怎么计算预测的box坐标值呢?

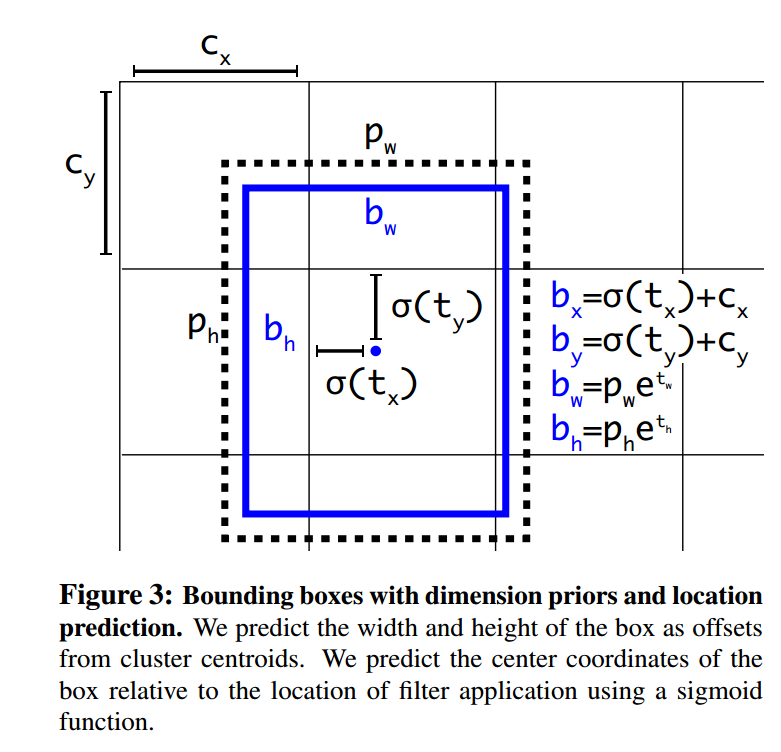
σ(tx)函数将预测值限定到了0-1之间.这样就保证了我们预测出来的box仍然是围绕着当前cell的.这一点也使得网络更稳定.
Since we constrain the location prediction the
parametrization is easier to learn, making the network
more stable. Using dimension clusters along with directly
predicting the bounding box center location improves
YOLO by almost 5% over the version with anchor boxes
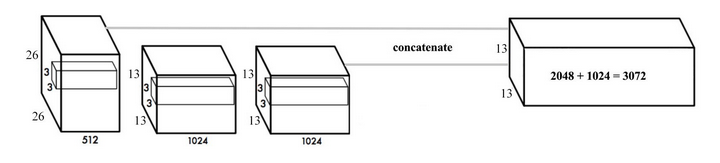
Fine-Grained Features
随着卷积不断进行,我们最终得到一个13*13的特征图.对大目标来说,基于这个特征图做预测是ok的,但是对小目标来说就没那么好了.Faster R-CNN或者SSD在不同的layer生成的特征图上去做位置的预测,相当于不同分辨率的特征图负责不同尺寸的目标. yolo采取了一个不同的思路,把两个layer的feature map连成一个.称之为passthrough,在此基础去做预测.如下图:
Multi-Scale Training
由于去掉了全连接层,模型的输入可以使任意size.为了让yolov2有更好的鲁棒性,在训练的时候,我们每10个batch就随机改变input的size.由于模型是进行32倍下采样的,所以我们把input size改变成320,352...608这些尺寸.
以上是yolov2提升准确率所做的改造.现在我们来看下为了更快的推理速度,yolov2都做了什么.
Googlenet
大部分检测网络是以VGG-16做为特征提取器的.以一个224*224的图片为例,一次前向传播,VGG-16有30.69 billion次浮点数运算.yolo用了一个基于googlenet的定制化的网络,一次前向传播只有8.52 billion次运算.相应的,代价是准确率的稍微下降.
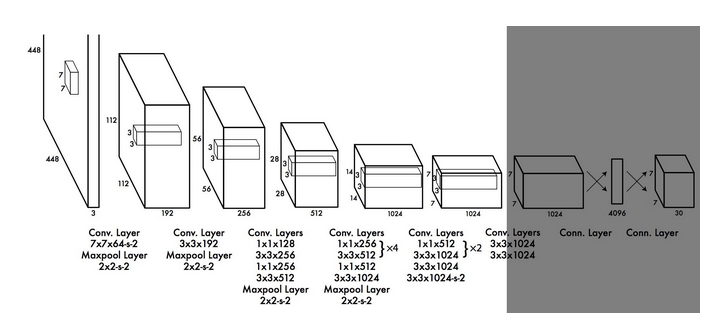
Darknet-19
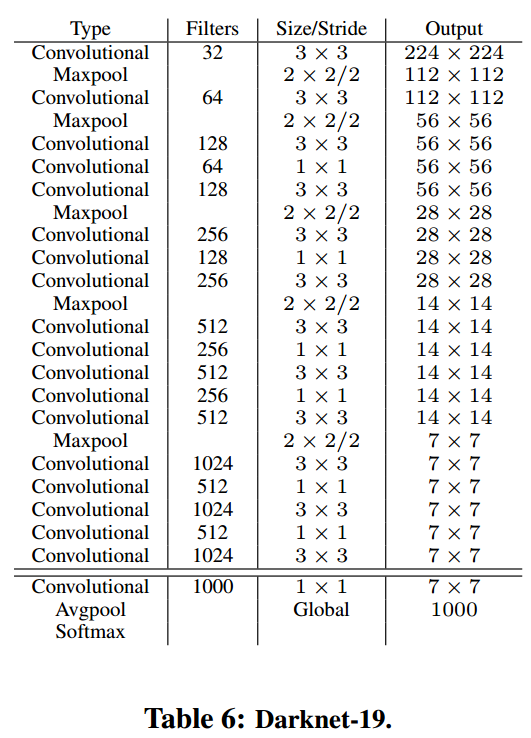
作者继续去简化特征提取层的网络结构.如上图. 注意上图份两部分. 最后三层(conv,avgpool,softmax)是做分类的.前面的n层是做特征提取的.
对这个分类网络,先在ImageNet做分类的训练,把特征提取的网络的参数训练出来,先用224*224的做训练,再用448*448的做微调.之后保持特征提取部分的网络不变,把最后几层替换掉,去做检测网络的训练.如下图

参考:https://arxiv.org/abs/1612.08242
yolo进化史之yolov2的更多相关文章
- yolo进化史之yolov3
yolov3的论文写的比较简略,不看yolov1,yolov2很难直接看懂. 建议先看v1,v2论文. yolov3主要做了几点改进 改进了特征提取部分的网络结构 多尺度预测 分类由softmax改为 ...
- 目标检测YOLO进化史之yolov1
yolov3在目标检测领域可以算得上是state-of-art级别的了,在实时性和准确性上都有很好的保证.yolo也不是一开始就达到了这么好的效果,本身也是经历了不断地演进的. yolov1 测试图片 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 小白也能弄懂的目标检测之YOLO系列 - 第一期
大家好,上期分享了电脑端几个免费无广告且实用的录屏软件,这期想给大家来讲解YOLO这个算法,从零基础学起,并最终学会YOLOV3的Pytorch实现,并学会自己制作数据集进行模型训练,然后用自己训练好 ...
- YOLO2解读,训练自己的数据及相关转载以供学习
https://pjreddie.com/darknet/yolo/ 具体安装及使用可以参考官方文档https://github.com/pjreddie/darknet https://blog.c ...
- 转载:点云上实时三维目标检测的欧拉区域方案 ----Complex-YOLO
感觉是机器翻译,好多地方不通顺,凑合看看 原文名称:Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection ...
- You Only Look One-level Feature
你只需要看一个层次的特征 摘要:本文回顾了单阶段检测器的特征金字塔网络(FPN),指出FPN的成功在于其对目标检测优化问题的分治解决,而不是多尺度特征融合.从优化的角度来看,我们引入了一种替代的方法来 ...
- [目标检测]YOLO原理
1 YOLO 创新点: 端到端训练及推断 + 改革区域建议框式目标检测框架 + 实时目标检测 1.1 创新点 (1) 改革了区域建议框式检测框架: RCNN系列均需要生成建议框,在建议框上进行分类与回 ...
随机推荐
- 【React踩坑记一】React项目中禁用浏览器双击选中文字的功能
常规项目,我们只需要给标签加一个onselectstart事件,return false就可以 例: <div onselectstart="return false;" & ...
- 10.Go-goroutine,waitgroup,互斥锁和channel
10.1.goroutine goroutine的使用 //Learn_Go/main.go package main import ( "fmt" "time" ...
- Java 安全之:csrf攻击总结
最近在维护一些老项目,调试时发现请求屡屡被拒绝,仔细看了一下项目的源码,发现有csrf token校验,借这个机会把csrf攻击学习了一下,总结成文.本文主要总结什么是csrf攻击以及有哪些方法来防范 ...
- MySQL-EXPLAIN执行计划字段解释
做 MySQL 查询优化遇到明明建了索引查询仍然很慢,看这个 SQL 的执行计划,看它到底有没有用到索引,执行的具体情况.我们可以用 EXPLAIN 命令查看 SQL 的执行计划,SQL 优化的重要性 ...
- Zookeeper_阅读源码第一步_在 IDE 里启动 zkServer(单机版)
Zookeeper是开源的,如果想多了解Zookeeper或看它的源码,最好是能找到它的源码并在 IDE 里启动,可以debug看它咋执行的,能够帮助你理解其原理. 准备源码 所以我们很容易搞到它的源 ...
- JVM调优前戏之JDK命令行工具---jhat
在JDK的命令行中,一般开发人员最耳熟能详的肯定就是java,javac,javap等常用命令,不过在jdk/bin下还有许多其他的命令行工具,它们被用来监测JVM运行时的状态,下面我们来详细解读一下 ...
- Jvm内存泄漏
内存泄漏和内存溢出的关系 内存泄露:指程序中动态分配内存给一些临时对象,但是对象不会被GC所回收,它始终占用内存.即被分配的对象可达但已无用. 内存溢出:指程序运行过程中无法申请到足够的内存而导致的一 ...
- jmeter之beanshell使用
beanshell官网:http://www.BeanShell.org/ 一.beanshell介绍 是一种完全符合Java语法规范的轻量级的脚本语言: 相当于一个小巧免费嵌入式的Java源代码解释 ...
- Java 实现MD5加密
说到MD5,那我们首先要知道什么是MD5,开始吧 MD5的典型应用是对一段信息(Message)产生信息摘要(Message-Digest),以防止被篡改.比如,在UNIX下有很多软件在下载的时候都有 ...
- WPF中查看PDF文件 - 基于开源的MoonPdfPanel (无需安装任何PDF阅读器)问题汇总
致敬Yang-Fei—有一个简单的用法示例: http://www.cnblogs.com/yang-fei/p/4885570.html. 写MoonPdfPanel的哥们关于这个开源软件的实现介绍 ...