【刚度矩阵推导】2d frame 单元
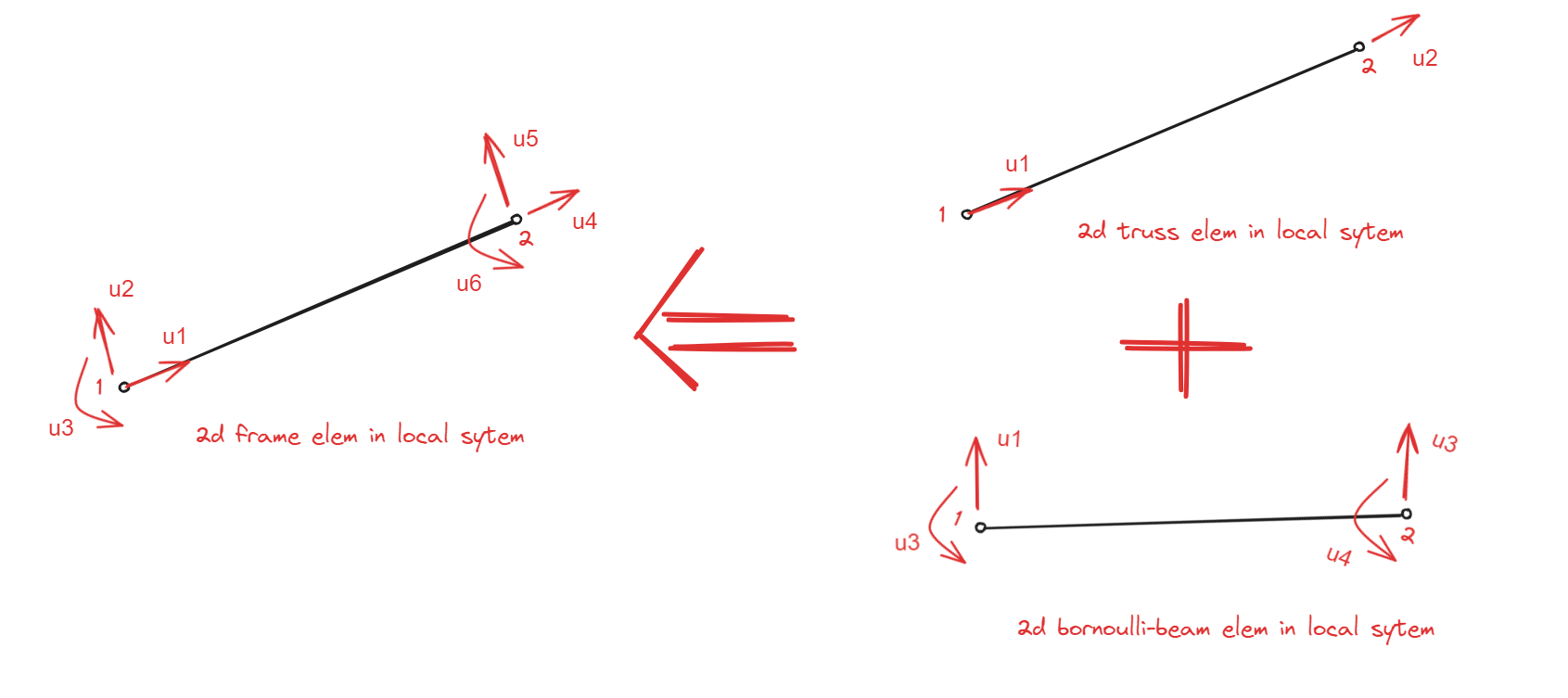
2d frame 单元是x-y平面上的单元,每个节点上有2个平移自由度的和一个转动自由度.局部坐标系下,单元位移向量为:
\(
u=[ u_1 ,u_2 ,u_3, u_4, u_5, u_6]^{T}
\)
其局部坐标系下的刚度矩阵可以由2d truss单元和2d bornoulli-beam单元的刚度矩阵组合而成.
使用matlab进行推导:
% ! bornoulli-beam element stiffness matrix in local system
clc
clear
syms E Iz L A
a=0.5*L;
k_e_bornoulli_beam_stiffness=E*Iz/(2*a^3)*[3 3*a -3 3*a ;3*a 4*a*a -3*a 2*a*a; -3 -3*a 3 -3*a;3*a 2*a*a -3*a 4*a*a ];
disp('k_e_bornoulli_beam_stiffness:')
simplify(k_e_bornoulli_beam_stiffness)
% todo : 2d truss element stiffness matrix in local system
k_e_2d_truss_stiffness=(E*A/L)*[1 -1; -1 1];
% todo : elem's dof
frame_2d_stiffness=sym(zeros(6,6));
frame_2d_stiffness([1,4],[1,4])=k_e_2d_truss_stiffness;
frame_2d_stiffness([2,3,5,6],[2,3,5,6])=k_e_bornoulli_beam_stiffness;
disp('frame_2d_stiffness:')
simplify(frame_2d_stiffness)
<!-- 输出结果 -->
k_e_bornoulli_beam_stiffness:
[ (12*E*Iz)/L^3, (6*E*Iz)/L^2, -(12*E*Iz)/L^3, (6*E*Iz)/L^2]
[ (6*E*Iz)/L^2, (4*E*Iz)/L, -(6*E*Iz)/L^2, (2*E*Iz)/L]
[-(12*E*Iz)/L^3, -(6*E*Iz)/L^2, (12*E*Iz)/L^3, -(6*E*Iz)/L^2]
[ (6*E*Iz)/L^2, (2*E*Iz)/L, -(6*E*Iz)/L^2, (4*E*Iz)/L]
frame_2d_stiffness:
[ (A*E)/L, 0, 0, -(A*E)/L, 0, 0]
[ 0, (12*E*Iz)/L^3, (6*E*Iz)/L^2, 0, -(12*E*Iz)/L^3, (6*E*Iz)/L^2]
[ 0, (6*E*Iz)/L^2, (4*E*Iz)/L, 0, -(6*E*Iz)/L^2, (2*E*Iz)/L]
[-(A*E)/L, 0, 0, (A*E)/L, 0, 0]
[ 0, -(12*E*Iz)/L^3, -(6*E*Iz)/L^2, 0, (12*E*Iz)/L^3, -(6*E*Iz)/L^2]
[ 0, (6*E*Iz)/L^2, (2*E*Iz)/L, 0, -(6*E*Iz)/L^2, (4*E*Iz)/L]
【刚度矩阵推导】2d frame 单元的更多相关文章
- Deep Learning论文笔记之(四)CNN卷积神经网络推导和实现(转)
Deep Learning论文笔记之(四)CNN卷积神经网络推导和实现 zouxy09@qq.com http://blog.csdn.net/zouxy09 自己平时看了一些论文, ...
- Delphi 封装Frame到Dll文件
做项目的时候,发现这个Frame很好用,为了省空间.调用和修改方便,就将Frame封装到dll(动态链接库)里面,确实很好使. 效果图如下: 上图是临时测试用的,忘了将Frame的align设置成al ...
- Deep Learning论文笔记之(四)CNN卷积神经网络推导和实现
https://blog.csdn.net/zouxy09/article/details/9993371 自己平时看了一些论文,但老感觉看完过后就会慢慢的淡忘,某一天重新拾起来的时候又好像没有看过一 ...
- lecture11-hopfiled网络与玻尔兹曼机
Hinton课程第11课 这部分的课程算是个知识背景,讲述RBM的来源吧,毕竟是按照hopfield--BM-RBM的路线过来的. 因为水平有限,都是直译,如果纠结某句话,肯定看不懂,所以这些课程只需 ...
- KCF目标跟踪方法分析与总结
KCF目标跟踪方法分析与总结 correlation filter Kernelized correlation filter tracking 读"J. F. Henriques, R. ...
- KCF追踪方法流程原理
读"J. F. Henriques, R. Caseiro, P. Martins, J. Batista, 'High-speed tracking with kernelized cor ...
- 此编译单元不包含在frame元数据中指定的factoryClass,无法加载配置的运行时共享库
警告:此编译单元不包含在frame元数据中指定的factoryClass,无法加载配置的运行时共享库.要在没有运行时共享库的情况下进行编译,请将 -static-link-runtime-shared ...
- Winograd Convolution 推导 - 从1D到2D
Winograd Convolution 推导 - 从1D到2D 姚伟峰 http://www.cnblogs.com/Matrix_Yao/ Winograd Convolution 推导 - 从1 ...
- 2d,3d中旋转推导
二维绕原点旋转,其实点为(x,y),旋转角度为黄色标注的角度. 推导过程如下: x' = r cos(al+be); y' = r sin(al+be);x '= rcosalcosbe-rsinal ...
- 我用MATLAB撸了一个2D LiDAR SLAM
0 引言 刚刚入门学了近一个月的SLAM,但对理论推导一知半解,因此在matlab上捣鼓了个简单的2D LiDAR SLAM的demo来体会体会SLAM的完整流程. (1)数据来源:德意志博物馆Deu ...
随机推荐
- Kali Linux上安装Openvas 漏洞分析器
第一步:安装 apt-get update apt-get install openvas openvas-setup 第二步:自定义密码 openvas-stop #停止openvas服务 open ...
- pip 安装 Caused by SSLError(SSLError(1, '[SSL: WRONG_VERSION_NUMBER] wrong version number (_ssl.c:1123)'))
1.问题 1.1 问题截取 pip install redis -i https://pypi.tuna.tsinghua.edu.cn/simple Looking in indexes: http ...
- x509.MarshalSm2PrivateKey
根据搜索结果,x509.MarshalSm2PrivateKey 函数需要两个参数:一个 *sm2.PrivateKey 和一个 []byte 类型的密码.以下是使用 x509.MarshalSm2P ...
- kubectl按pod创建时间排序获取列表 _
按时间排序,可以更快地找到最近更新的pod 基于当前ns 1 kubectl get pods --sort-by=.metadata.creationTimestamp BASH 基于整个集群 1 ...
- liquibase maven
<?xml version="1.0" encoding="UTF-8"?> <project xmlns="http://mave ...
- [转]CLion安装及无限试用
Clion安装及无限试用:链接:https://pan.baidu.com/s/1mreUx5QyS4nkVQMOhdjf7g提取码:ylqw 翻译 搜索 复制
- Wasm在即时通讯IM场景下的Web端应用性能提升初探
本文由得物技术WWQ分享,原题"基于IM场景下的Wasm初探:提升Web应用性能",下文进行了排版和内容优化. 1.什么是Wasm Wasm,全称 WebAssembly,官网描述 ...
- 阿里IM技术分享(八):深度解密钉钉即时消息服务DTIM的技术设计
本文引用自InfoQ社区"5亿用户如何高效沟通?钉钉首次对外揭秘即时消息服务DTIM"一文,作者陈万红等.策划褚杏娟,有修订和改动. 一.引言 本文是国内企业IM的事实王者钉钉首次 ...
- Golang-结构体6
http://c.biancheng.net/golang/struct/ Go语言结构体定义 Go语言可以通过自定义的方式形成新的类型,结构体就是这些类型中的一种复合类型,结构体是由零个或多个任意类 ...
- 项目PMP之八项目质量管理
项目PMP之八--项目质量管理 一.定义:以执行组织的名义支持过程的持续改进活动 核心理念:兼顾项目管理和可交付成果两方面 质量影响程度(代价由大到小):客户发现缺陷 > 交付前检测和纠正缺 ...