蜂鸟E203 IFU模块
E203的IFU(instruction fetch unit)模块主要功能和接口如下:
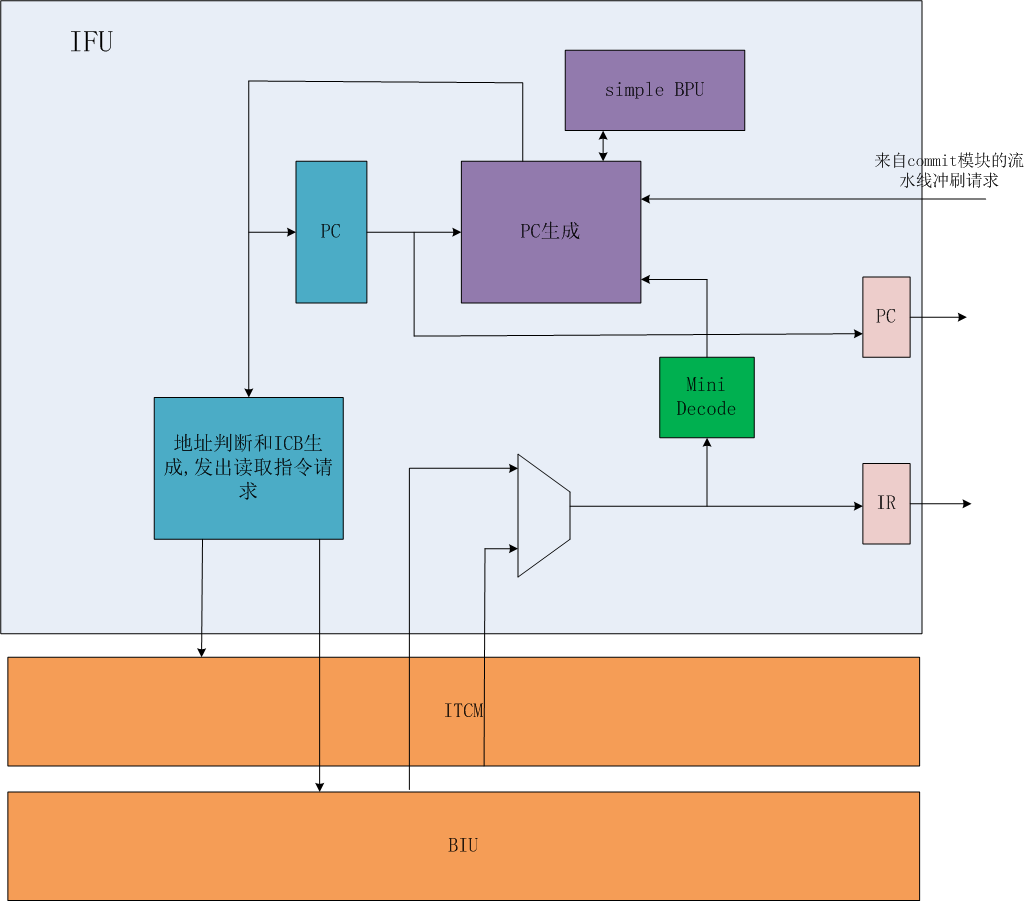
- IFU的PC生成单元产生下一条指令的PC。
- 该PC传输到地址判断和ICB生成单元,就是根据PC值产生相应读指请求,可能的指令目的是ITCM或者外部存储,外部存储通过BIU访问。
- 该PC值也会传输到和EXU单元接口的PC寄存器中。
- 取回的指令会放置到和EXU接口的IR(Instruction register)寄存器中。EXU单元会根据指令和其对应的PC值进行后续的操作。
- 因为每个周期都要产生下一条指令的PC,所以取回的指令也会传入Mini-Decode单元,进行简单的译码操作,判别当前指令是普通指令还是分支跳转指令。如果判别为分支跳转指令,则在同一周期进行分支预测。最后,根据译码的信息和分支预测的信息生成下一条指令的PC。
- 来自commit模块的冲刷管线请求会复位PC值。
因为蜂鸟IFU要在同一个时钟周期完成取指,译码,分支预测,生成PC等多个操作,所以时序上的关键路径会制约它的最高主频。
IFU模块的接口包括如下信号:
inspect_pc, output, 位宽:32
当前IFU所取指令的pc值,如果当前ifu_reset_req信号置高,则为pc复位值,即pc_rtvec值=0x1000,因为指令被放在itcm中,itcm起始地址为0x8000_0000,所以通常pc值为itcm的某个地址值。
当rom启动系统时候,复位pc是0x1000=4096,通过指令0x7ffff297,auipc x5,0x7ffff, 当前x5=当前pc值+7ffff000=0x1000+0x7ffff000=0x8000_0000,指向了itmc的首地址。
然后通过指令jalr=0x28067, 指令跳转到x5指定的地址。
rom的初始化在文件sirv_mrom.v 中
genvar i;
generate
if(1) begin: jump_to_ram_gen
// Just jump to the ITCM base address
for (i=0;i<1024;i=i+1) begin: rom_gen
if(i==0) begin: rom0_gen
assign mask_rom[i] = 32'h7ffff297; //auipc t0, 0x7ffff
end
else if(i==1) begin: rom1_gen
assign mask_rom[i] = 32'h00028067; //jr t0
end
else begin: rom_non01_gen
assign mask_rom[i] = 32'h00000000;
end
end
end
else begin: jump_to_non_ram_gen
ifu_active, output, 位宽1
这个输出信号总是1,意味着ifu模块会一直处于活动状态。
pc_rtvec, input, 位宽32
pc复位值,如果用simulation,其值为0x1000, 如果用fpga,外部qspi flash地址为0x2000_0000。这个信号从常开域传入。
sirv_aon_wrapper.v
// This signal will be passed to the main domain, since this is kind of pad selected signal
// we dont need to sync them in main domain, just directly use it
assign pc_rtvec = aon_io_bootrom ? 32'h0000_1000 :
// This is the external QSPI flash base address
32'h2000_0000;
ifu2itcm_holdup, input, 位宽1
上次访问itcm的模块是ifu,则设置该信号为高。
itcm_region_indic, input, 位宽32
itcm 起始地址指示信号,它的值为 0x8000_0000
该值在cpu_top.v中实例化e203_core时候,传入宏E203_ITCM_BASE_ADDR的值。
ifu2itcm_icb_cmd_valid, output, 位宽1
ifu2itcm_icb_cmd_ready,input,位宽1
ifu和itcm命令通道通讯的握手信号,采用icb协议,icb协议会在单独的文章中详细介绍。
ifu2itcm_icb_cmd_addr,output,位宽16
ifu请求读/写itcm数据的起始地址,因为itcm是64K大小,所以itcm地址位宽为16位。
ifu2itcm_icb_rsp_valid, input, 位宽1
ifu2itcm_icb_rsp_ready,output,位宽1
ifu和itcm响应通道通讯的握手信号,采用icb协议,icb协议会在单独的文章中详细介绍
ifu2itcm_icb_rsp_err, input, 位宽1
读或写itcm反馈的错误标志,如果该信号为低,则ifu接受itcm的返回结果。
ifu2itcm_icb_rsp_rdata, input, 位宽64
从itcm返回的32位数据。
ifu2biu_icb_cmd_valid, output, 位宽1
ifu2biu_icb_cmd_ready,input,位宽1
ifu和biu命令通道通讯的握手信号,采用icb协议,icb协议会在单独的文章中详细介绍。这个接口用于从system memory中读取数据
ifu2biu_icb_cmd_addr,output,位宽32
ifu请求读/写biu数据的起始地址,32位地址。
ifu2biu_icb_rsp_valid, input, 位宽1
ifu2biu_icb_rsp_ready,output,位宽1
ifu和biu响应通道通讯的握手信号,采用icb协议,icb协议会在单独的文章中详细介绍
ifu2biu_icb_rsp_err, input, 位宽1
读或写biu反馈的错误标志,如果该信号为低,则ifu接受biu的返回结果。
ifu2biu_icb_rsp_rdata, input, 位宽32
从biu返回的32位数据。
ifu_o_ir,output, 位宽32
指令寄存器中的值,是当前从itcm或biu中读取的32位指令数据,传输到exu的decoder中进行解码操作。
当指令来自于biu(system memory)时候,取得数据是32位,ifu_o_ir是ifu2biu_icb_rsp_rdata寄存一个周期。
当指令来自于itcm时候,因为itcm是64位,所以ifu2itcm_icb_rsp_rdata,返回的数据是64位,因为itcm是sram,上次访问的数据会一直holdup住。但ifu每次只取其中32位数据。因为会连续两次或多次在一个lane(64位对齐的数据成为一个lane)里面访问。如果上次访问的itcm的sram,下一次取指在同一个lane里面,则不会真的读取sram,会利用sram holdup的特性,直接使用其保持不变的输出。如果顺序取一个32位的指令其非对齐的地址跨越了64位边界,那么会将sram当前输出的最高16位放在leftover buffer之中。并发起新的itcm sram访问操作,然后将新访问itcm sram返回的低16位与leftover buffer中的值拼接成一个完整的32位指令。因此等效于一个周期读取一条指令,不会造成性能损失。如果是非顺序取指,比如分支或跳转指令,且地址为非对齐地址跨越了64位边界,那么就需要发起两次itcm读操作。第一个读回的数据的高16位放入leftover buffer中,第二次读回的数据的低16位和leftover buffer中的16位数据组合想成一个32位的指令。因此需要两个周期才能取回指令。
ifu_o_pc,output,位宽32
当前的指令pc值,注意:ifu_o_pc和inspect_pc的区别,ifu_o_pc相当于被寄存一个周期的inspect_pc值。
ifu_o_pc_valid, output, 位宽1
pc信号是有效的
ifu_o_misalgn,output,位宽1
该信号总是0,在e203中,不会发生不对齐的情况。
ifu_o_buserr,output,位宽1
该信号=ifu_rsp_err
ifu_o_rs1idx,output,位宽5
当前指令 源寄存器rs1的索引,来自于mini decoder模块的输出
ifu_o_rs2idx,output,位宽5
当前指令 源寄存器rs2的索引,来自于mini decoder模块的输出
ifu_o_prdt_taken,output,位宽1
当前指令预测是否需要跳转,来自于ifu中的bpu模块。
ifu_o_mul2div_b2b,output,位宽1
// For multiplicaiton, only the MUL instruction following
// MULH/MULHU/MULSU can be treated as back2back
( minidec_mul & dec2ifu_mulhsu)
// For divider and reminder instructions, only the following cases
// can be treated as back2back
// * DIV--REM
// * REM--DIV
// * DIVU--REMU
// * REMU--DIVU
pipe_flush_ack,output,位宽1
总是1,
pipe_flush_req,input,位宽1
pipe flsuh请求,来自于exu模块,冲刷现在管线,根据新的pc值从新取指。
pipe_flush_add_op1,input,32
pipe flsuh操作的op1,和op2一起决定新的pc
pipe_flush_add_op2,input, 32
pipe flsuh操作的op2,和op1一起决定新的pc
ifu_halt_req,input,位宽1
ifu_halt_ack,output,位宽1
ifu halt请求响应信号,请求置高后,ifu停止取新的指令,ack响应置高后,恢复取指令。
// The halt request come from other commit stage
// If the ifu_halt_req is asserting, then IFU will stop fetching new
// instructions and after the oustanding transactions are completed,
// asserting the ifu_halt_ack as the response.
// The IFU will resume fetching only after the ifu_halt_req is deasserted
oitf_empty,input,位宽1
oitf为空,不用进行数据冲突判断,肯定不存在RAW和WAW数据冲突
rf2ifu_x1,input,位宽32
当前x1寄存器的值
rf2ifu_rs1,input,位宽32
当前指令中rs1寄存器的值
dec2ifu_rden,input,位宽1
当前指令包括目的寄存器寄存器rd
dec2ifu_rs1en,input,位宽1
当前指令包括源寄存器rs1
dec2ifu_rdidx,input,位宽5
当前指令目的寄存器rd索引
dec2ifu_mulhsu,input,位宽1
当前指令为mulh,mulhsu, mulhu
dec2ifu_div,input,位宽1
当前指令为div
dec2ifu_rem,input,位宽1
当前指令为rem
dec2ifu_divu,input,位宽1
当前指令为divu
dec2ifu_remu,input,位宽1
当前指令为remu
clk,input,位宽1
时钟信号
rst_n,input,位宽1
复位信号
蜂鸟E203 IFU模块的更多相关文章
- E203 译码模块(1)
E203是两级流水线结构,第一级是IFU进行取指操作,第二级包括译码.执行.交付和写回等功能.架构图如下: https://www.cnblogs.com/images/cnblogs_com/mik ...
- 蜂鸟E203系列——Linux开发工具
欲观原文,请君移步 Vivado安装 vivado是运行工程的工具,所以必须安装 后台回复[vivado2017]可获取vivado 2017.4 | 后台回复[vivado2020]可获取vitis ...
- 蜂鸟E203系列——Linux调试(GDB+Openocd)
欲观原文,请君移步 本文基于文章<蜂鸟E203系列--利用 Hbrid-E-SDK 环境开发程序> GDB 简介 GDB(GNU Project Debugger),是 GNU 工具链中的 ...
- E203 译码模块(2)
常用的alu算术运算指令(包括ecall和 ebreak)在regular alu单元处理.regular alu单元为alu单元的一个子单元.regular单元的信息总线共21位,格式如下图所示,其 ...
- 蜂鸟E203系列——Linux下运行hello world例程
欲观原文,请君移步 创建程序 在 -/hbird-e-sdk-master/software 路径下创建一个"helloworld"中文件夹 在 -/hbird-e-sdk-mas ...
- E203译码模块(3)
下面的代码译码出指令的立即数,不同的指令有不同的立即数编码形式. //I类型指令的imm,[31:20],符号位扩展成32位. wire [31:0] rv32_i_imm = { {20{rv32_ ...
- 真正的RISC-V开发板——VEGA织女星开发板开箱评测
前言 由于最近ARM公司要求员工"停止所有与华为及其子公司正在生效的合约.支持及未决约定",即暂停与华为的相关合作,大家纷纷把注意力投向了另一个的处理器架构RISC-V,它是基于精 ...
- RISCV 入门 (学习笔记)
文章目录 1. risv 相关背景 1.1 arm 授权费 1.2 riscv 发展历史 1.3 riscv 风险 2. 指令集 2.1 可配置的通用寄存器组 2.2 规整的指令编码 2.3 简洁的存 ...
- E203 CSR寄存器
RiscV架构则定义了一些控制和状态寄存器(CSR),用于配置或记录一些运行的状态.CSR寄存器是处理器内核内部的寄存器,使用专有的12位地址编码空间,对一个hart,可以配置4k的CSR寄存器. 蜂 ...
随机推荐
- Mysql—事务原理与详解
事务的四大特性 事务的隔离级别 https://www.cnblogs.com/57rongjielong/p/8036418.html https://blog.csdn.net/zwq123211 ...
- Day_05
01.error接口的使用 package main import "fmt" import "errors" func main() { //var err1 ...
- 【BZOJ2138】stone(线段树+hall定理)
传送门 题意: 现在有\(n\)堆石子,每堆石子有\(a_i\)个. 之后会有\(m\)次,每次选择\([l,r]\)的石子堆中的石子扔\(k\)个,若不足,则尽量扔. 现在输出\(1\)~\(m\) ...
- c# WF 第1节 创建winform程序
本节内容: 1:vs的RAD 2:WinForm的创建简介 3:创建窗口与控制台程序文件的对比 4:窗口文件内容 5:winform怎么运行 6:winform的实质 1:vs的RAD 2:WinFo ...
- Pwnable-blackjack
游戏源码 http://cboard.cprogramming.com/c-programming/114023-simple-blackjack-program.html 打开之后是一个游戏 你有5 ...
- calcifications loss
import keras import tensorflow as tf from keras.models import Model from keras import backend as K # ...
- Python equivalent of D3.js
http://brandonrose.org/ Python equivalent of D3.js Ask Question Asked 7 years, 1 month ago Act ...
- 【目录】洛谷|CODEVS题解汇总
[动规]爱与愁的心痛 [动规]编辑距离 [动规]采药 [动规]创意吃鱼法 [动规]过河卒 [动规]开心的金明 [动规]旅行 [动规]骑士游历 [动规]数字三角形 [动规]最长连号 [动规]装箱问题 [ ...
- a 标签 pointer-events
a 标签渲染到也页面之后,由于某些原因需要,禁用. 有两种方法可以设置禁用效果. 1.使用 CSS 属性 pointer-events ,设置此属性为 none 之后,元素将不会成为鼠标事件的 tar ...
- 利用数据库视图实现WEB查询敏感信息接口动态脱敏
前言: 利用数据库视图,实现web接口查询敏感信息时动态脱敏. 具体目标:某接口为用户信息查询接口,返回敏感用户信息(id,姓名.手机号[敏感].身份证号[敏感]),如果web用户为管理员角色,则查询 ...