Density-invariant Features for Distant Point Cloud Registration论文阅读
Density-invariant Features for Distant Point Cloud Registration
2023 ICCV
*Quan Liu, Hongzi Zhu, Yunsong Zhou, Hongyang Li, Shan Chang, Minyi Guo*; Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023, pp. 18215-18225
- paper: [2307.09788] Density-invariant Features for Distant Point Cloud Registration (arxiv.org)
- code: [liuQuan98/GCL: ICCV 23] Density-invariant Features for Distant Point Cloud Registration (github.com)

Idea
面向outdoor LiDAR点云,利用multiple point clouds sample set(in the same spatial location), 基于Group-wise Contrastive Learning方法,应用dense feature extractor(FCGF, KPConv……),提取density-invariant geometric features,解决远距离激光雷达点云配准(distant outdoor LiDAR point cloud registration)任务。
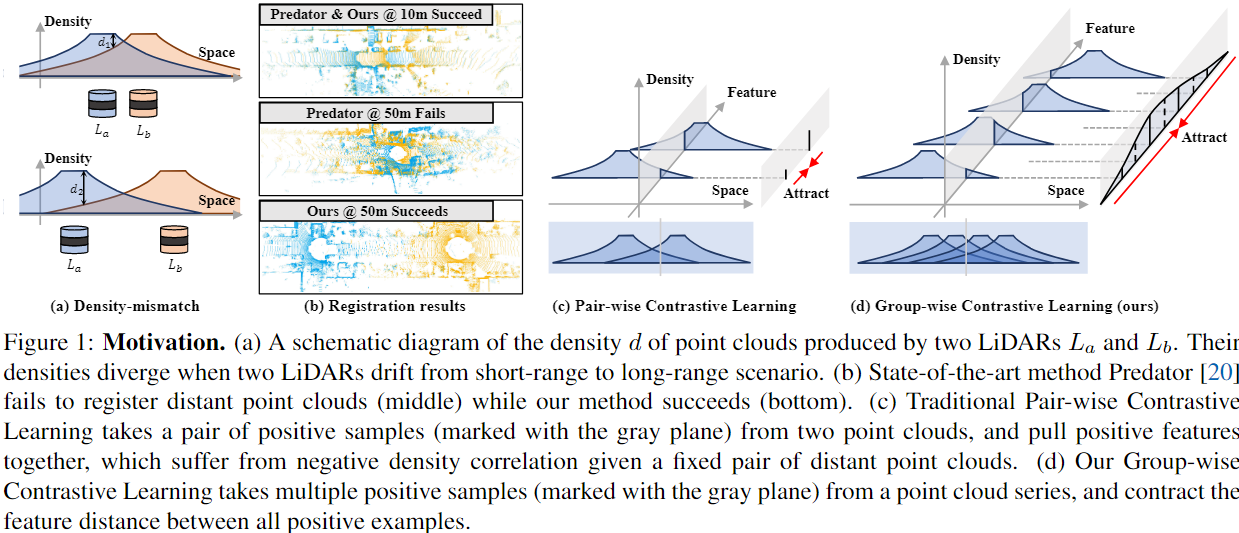
distant outdoor LiDAR point cloud registration的难点在于随着与LiDAR间隔距离的扩大,不同空间位置的点云密度会程二次曲线性质下降。这会造成不同点云重叠区域点云密度不同,深度学习方法对于该特性比较敏感,其配准性能会发生下降,也就是density-mismatch problem。
回顾以前的feature-based对比学习配准方法,每一个batch都是一对正样本待配准点云 ,然后取推理出各关键点正样本对的similar feature descriptor。根据文献[1] ,这么做能够收敛的前提是重叠区域点云样本独立同分布 ,简单来说就是密度和形状近似一致。但是显然这样训练出来的模型无法解决density-mismatch problem 。实验表明,无论是密度相关方法(e.g. voxelization) or 密度自适应方法都不能很好的配准distant outdoor point cloud.
作者提出的方法简单来说就是:既然训练时一对正样本达不到,那我就多用些正样本,用一组高overlap的正样本待配准点云来进group contrastive learning,通过这样数据增广的方式来实现density-invariant feature提取,使得模型能够克服density-mismatch问题。
原文:A large enough positive group can better approximate the underlying feature distribution .
Contribution
- 从理论上分析了distant point clouds registration 的困难,提出构建更多的 i.i.d (independently and identically distributed) positive samples 是训练出density-invariant feature descriptor的关键;
- 基于group-wise contrastive learning,提出有效的density-invariant feature descriptor 训练方案和相应的loss;
- 在KITTI和nuScenes的远距离点云配准样本下刷SOTA(KITTI:+40.9%; nuScenes: +26.9% -> reigistration recall)
论文中说对比学习方案设计更多考虑怎么提取更加困难的负样本,很少研究怎么提升正样本带来的训练效果 (A noticeable trend is that sampling more and harder negative samples will improve feature quality due to elevated stability and informativeness, but improvements on positive samples are scarce.),虽然group contrastive learning不是什么新概念,但是据我浅薄的学识来看,确实是第一次用在本文的任务上。
Description
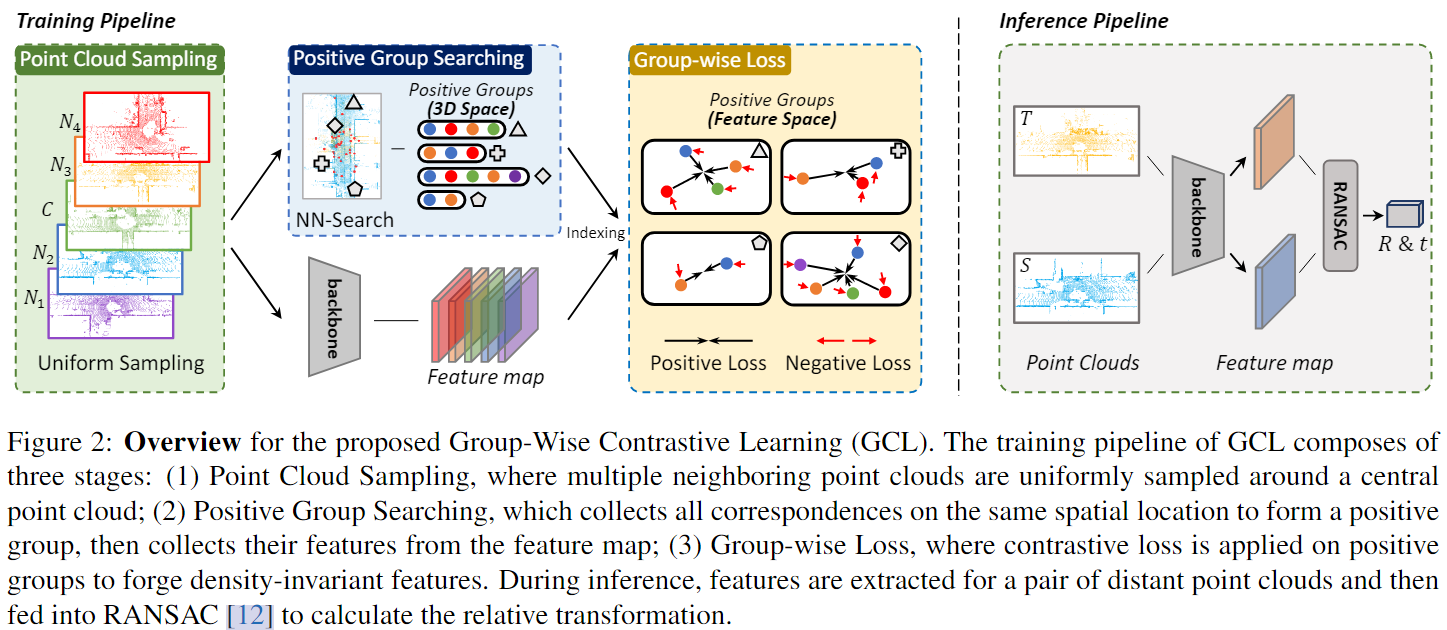
pipline还是比较清晰的四个步骤:
- 以 \(C\) frame为中心,在 \([-60m, 60m]\) 区域内选择N个segment,并对segment进行均匀采样得到点云(对于这个选择segment方式我还没有理清楚)。
- 使用fully convolutional features descriptor (FCGF、KPConv)为点云中每个点提取feature;
- 使用nearest neighbor search 以 \(C\) 点云每个点寻找在其他点云下的对应正样本点,并丢弃找不到多余1个对应点的参考点,称为positive group search;
- 之后计算Group-wise Loss:
\]


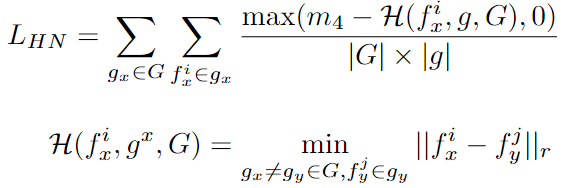
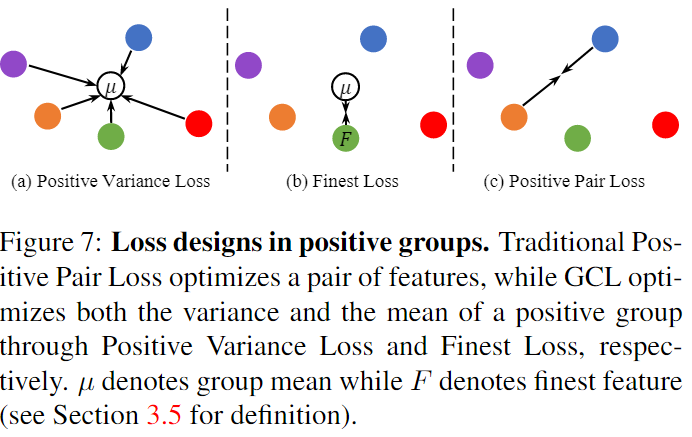
- \(L_{PV}\) : positive variance loss( \(\mu(·)\) is the average of all feature descriptors \(f_x^i\) of \(g_x\) correspondence group)
- \(L_F\) : Finest loss( \(\mathcal{F}(·)\) is the finest feature for \(g_x\) correspondence group)
- \(L_{HN}\) : the hardest negative loss
Experiment
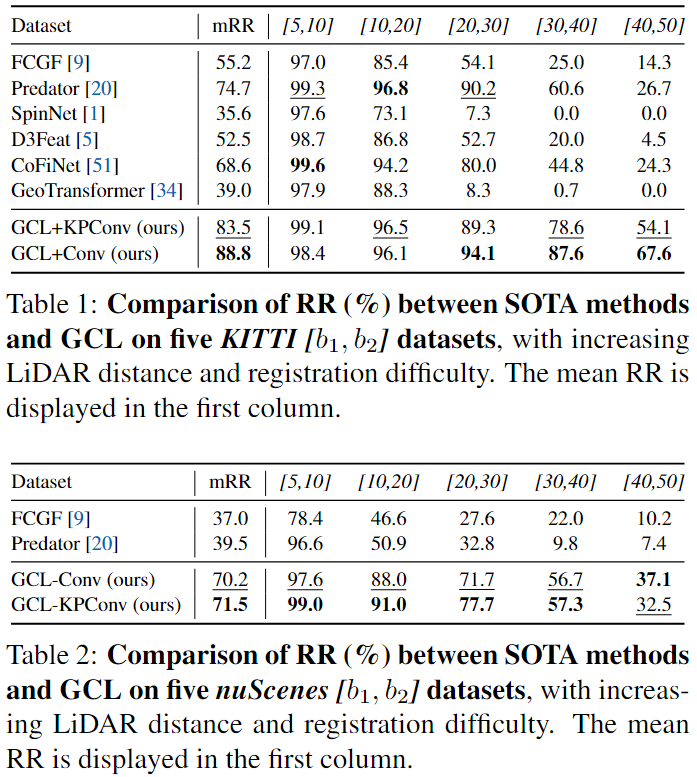
实话说,确实厉害,这个提点
Ablation
对于multi positive point cloud set中point cloud的数目:
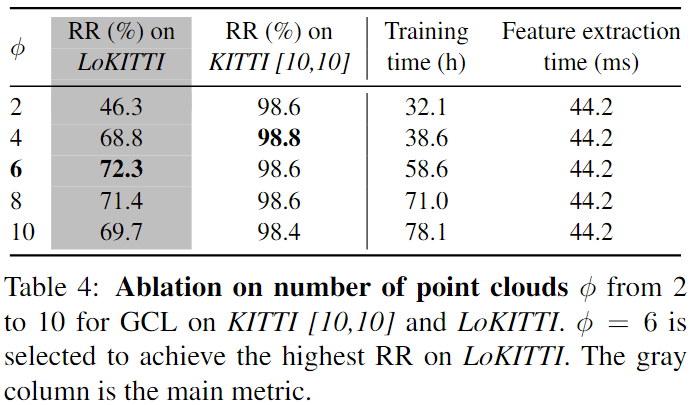
可以看到很明显,增多了正样本点云数量确实对于提取density-invariant feature很有帮助。
Saunshi, Nikunj, et al. "A theoretical analysis of contrastive unsupervised representation learning." International Conference on Machine Learning. PMLR, 2019. ︎
Density-invariant Features for Distant Point Cloud Registration论文阅读的更多相关文章
- Computer Vision_18_Image Stitching:Automatic Panoramic Image Stitching using Invariant Features——2007
此部分是计算机视觉部分,主要侧重在底层特征提取,视频分析,跟踪,目标检测和识别方面等方面.对于自己不太熟悉的领域比如摄像机标定和立体视觉,仅仅列出上google上引用次数比较多的文献.有一些刚刚出版的 ...
- Wasserstein CNN: Learning Invariant Features for NIR-VIS Face Recognition
承接上上篇博客,在其基础上,加入了Wasserstein distance和correlation prior .其他相关工作.网络细节(maxout operator).训练方式和数据处理等基本和前 ...
- 论文阅读:Andromeda: Performance, Isolation, and Velocity at Scale in Cloud Network Virtualization (全文翻译用于资料整理和做PPT版本,之后会修改删除)
Abstract: This paper presents our design and experience with Andromeda, Google Cloud Platform’s net ...
- 【论文阅读】Deep Clustering for Unsupervised Learning of Visual Features
文章:Deep Clustering for Unsupervised Learning of Visual Features 作者:Mathilde Caron, Piotr Bojanowski, ...
- 【论文阅读】HydraPlus-Net: Attentive Deep Features for Pedestrian Analysis
转载请注明出处:https://www.cnblogs.com/White-xzx/ 原文地址:https://arxiv.org/abs/1709.09930 Github: https://git ...
- 论文阅读:Robust Visual SLAM with Point and Line Features
本文提出了使用异构点线特征的slam系统,继承了ORB-SLAM,包括双目匹配.帧追踪.局部地图.回环检测以及基于点线的BA.使用最少的参数对线特征采用标准正交表示,推导了线特征重投影误差的雅克比矩阵 ...
- CVPR 2020 全部论文 分类汇总和打包下载
CVPR 2020 共收录 1470篇文章,根据当前的公布情况,人工智能学社整理了以下约100篇,分享给读者. 代码开源情况:详见每篇注释,当前共15篇开源.(持续更新中,可关注了解). 算法主要领域 ...
- CVPR 2020论文收藏(转知乎:https://zhuanlan.zhihu.com/p/112337176)
CVPR 2020 共收录 1470篇文章,根据当前的公布情况,人工智能学社整理了以下约100篇,分享给读者. 代码开源情况:详见每篇注释,当前共15篇开源.(持续更新中,可关注了解). 算法主要领域 ...
- CVPR2020文章汇总 | 点云处理、三维重建、姿态估计、SLAM、3D数据集等(12篇)
作者:Tom Hardy Date:2020-04-15 来源:CVPR2020文章汇总 | 点云处理.三维重建.姿态估计.SLAM.3D数据集等(12篇) 1.PVN3D: A Deep Point ...
- 点云配准的端到端深度神经网络:ICCV2019论文解读
点云配准的端到端深度神经网络:ICCV2019论文解读 DeepVCP: An End-to-End Deep Neural Network for Point Cloud Registration ...
随机推荐
- 开源一个RAG大模型本地知识库问答机器人
弹指间,2009年大学毕业到现在2024年,已经15年过去了. 前2天,看到自己14年在博客园写的一个博客,哪个时候是工作之余创业 感兴趣的朋友可以看看我10年前发的一篇博客https://www.c ...
- 使用Scrcpy 在电脑显示手机画面并控制安卓设备
使用Scrcpy 显示手机画面并控制手机 原文(有删改):https://www.iplaysoft.com/scrcpy.html 背景 本文适用于安卓开发人员,不针对普通安卓手机用户. 在安卓开发 ...
- Coap 协议学习:1-有关概念
COAP协议简介 不像人接入互联网的简单方便,由于物联网设备大多都是资源限制型的,有限的CPU.RAM.Flash.网络宽带等.对于这类设备来说,想要直接使用现有网络的TCP和HTTP来实现设备实现信 ...
- NXP i.MX 8M Plus工业开发板规格书(四核ARM Cortex-A53 + 单核ARM Cortex-M7,主频1.6GHz)
1 评估板简介 创龙科技TLIMX8MP-EVM是一款基于NXP i.MX 8M Plus的四核ARM Cortex-A53 + 单核ARM Cortex-M7异构多核处理器设计的高性能工业评估板 ...
- SqlCel 和MySQL for Excel在批量处理数据上的优劣
先放MySQL for Excel编辑数据的界面, 理论上可以批量修改数据....但是: 百度翻译如下: 更改不被允许.....[经测试,64位的Excel出现同样的情况] 转换思路:不使用公式去匹配 ...
- Spring 获取Bean ApplicationContextAware的使用
创建类继承ApplicationContextAware package net.ybclass.online_ybclass.utils; import org.springframework.be ...
- 洛谷P1365
WJMZBMR打osu! / Easy 题目背景 原 维护队列 参见 P1903 题目描述 某一天WJMZBMR在打osu~~~但是他太弱逼了,有些地方完全靠运气:( 我们来简化一下这个游戏的规则 有 ...
- springboot项目分层
springboot项目分层 一般的项目模块中都有DAO.Entity.Service.Controller层. Entity层:实体层 数据库在项目中的类 Entity层是实体层,也就是所谓的mod ...
- XAMPP的mysql启动失败:Plugin ‘FEEDBACK‘ is disabled
安装完XAMPP后启动mysql,发现启动失败也没有任何提示,通过查看mysql_error日志,描述: 2021-08-11 18:56:53 0 [Note] InnoDB: Mutexes an ...
- 【Mybatis】08 ResultMap、Association、分步查询、懒加载
ResultMap自定义结果集 可以把查询返回的结果集封装成复杂的JavaBean对象 原来的ResultType属性,只能把查询到的结果集转换为简单的JavaBean 什么是简单的JavaBean对 ...