VINS中的重力-尺度-速度初始化(2)
VINS中的重力-尺度-速度初始化(2)
细化重力
\(\quad\)上一篇文章中得到的 \(g\) 一般是存在误差的。因为在实际应用中,当地的重力向量的模一般是已知固定大小的(所以只有两个自由度未知),而我们在前面求解时并没有利用这个条件,因此最后计算出来的重力向量很难刚好满足这个条件。于是,在vins的初始化中,还会对得到的重力向量进行修正。
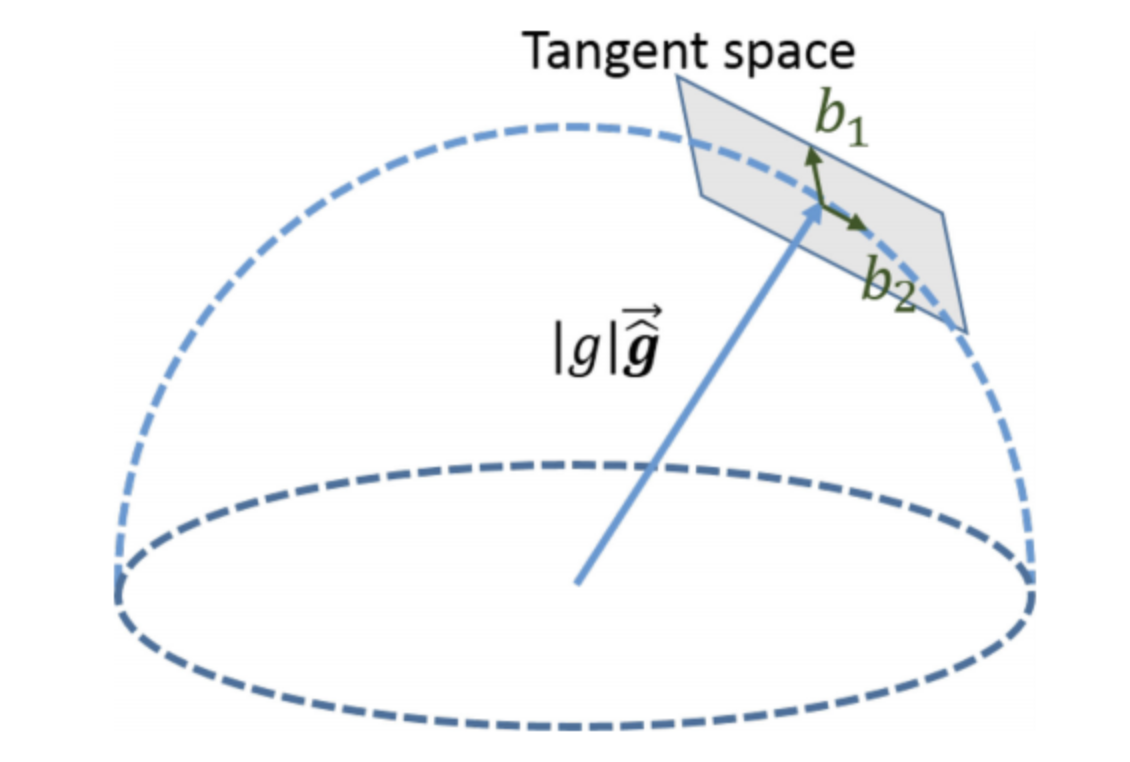
\(\quad\)首先,作者对重力向量进行参数化:
\]
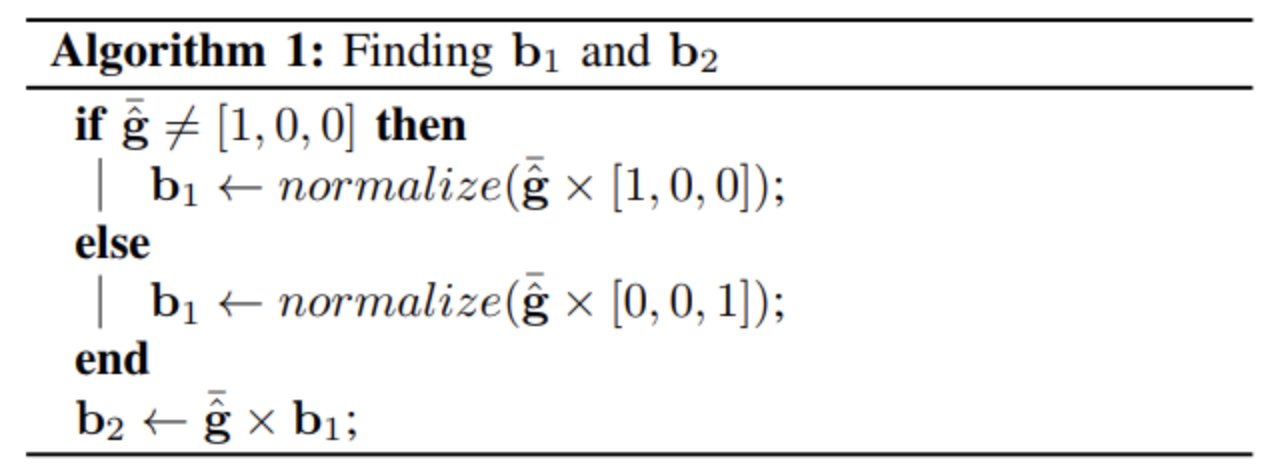
其中,\(\overline{\hat{g}}\)是上一步中估计得到的重力向量方向的单位向量,\(b_1\)与\(b_2\)是另外两个单位向量,是\(\overline{\hat{g}}\)切平面上的两个互相垂直的单位向量,获得方式如下:
此时我们可以从上面的式子知道,原本三维的优化变量 \(g^{c 0}\) 已经可以使用两维的 \(w^{2 \times 1}\) 替代。参考上一节的推导,待优化变量变成了
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w^{2 \times 1} \\
s
\end{array}\right]
\]
最后得到的观测方程也变为了
-I \Delta t_{k} & 0 & \frac{1}{2} R_{c_{0}}^{b_{k}} \Delta t_{k}^{2} \vec{b} & R_{c_{0}}^{b_{k}}\left(p_{c_{k+1}}^{c_{0}}-p_{c_{k}}^{c_{0}}\right) \\
-I & R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} & R_{c_{0}}^{b_{k}} \Delta t_{k} \vec{b} & 0
\end{array}\right]\left[\begin{array}{c}
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w \\
s
\end{array}\right]=\left[\begin{array}{c}
\alpha_{b_{k+1}}^{b_{k}}+R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} p_{c}^{b}-p_{c}^{b}-\frac{1}{2} R_{c_{0}}^{b_{c}} \Delta t_{k}^{2}\|g\| \hat{\hat{g}} \\
\beta_{b_{k+1}}^{b_{k}}-R_{c_{0}}^{b_{k}} \Delta t_{k}\|g\| \hat{g}
\end{array}\right]
\]
基于新得到的观测方程(可以使用LDLT分解求解),我们可以通过重力约束不断地对初始化结果进行修正,迭代对其 进行求解(vins中迭代了4次),最后得到一个修正后的初始化结果。
与世界坐标系对齐
这一步一般是最后一步,一般世界坐标系选择的是东北天坐标系。则这个对齐操作就是得到将重力向量旋转到Z轴上的旋转矩阵,这个旋转矩阵就是将原本坐标变换到世界坐标系(东北天坐标系)的变换矩阵。
找到这个变换矩阵后,接下来就是使用这个变换矩阵将位姿,速度等状态信息都变换到世界坐标系下。
加速度计bias
通过上面的阅读,我们会发现在vins的初始化中并没有对加速度计的bias进行估计,感觉对于超定的方程,多计算一个加速度计的bias好像也不是什么难事,,而且建模应该会更准确。在这个初始化工作的论文中其实有解释原因:
- 通过仿真实验证明,如果运动不剧烈,加速度计的bias很难被观测出来;
- 忽略加速计的bias对估计其他初始值的影响不大;
- 加速度计的bias是可以通过之后的VIO紧耦合优化,慢慢估计出来的;
参考资料
- [1] https://github.com/HKUST-Aerial-Robotics/VINS-Mono
- [2] VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator, Tong Qin, Peiliang Li, Zhenfei Yang, Shaojie Shen, IEEE Transactions on Robotics
- [3] https://xhy3054.github.io/
VINS中的重力-尺度-速度初始化(2)的更多相关文章
- VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)
初始化时需要求出的变量:相机和imu外参r t.重力g.尺度s.陀螺仪和加速度计偏置ba bg. 下面对两种算法初始化的详细步骤进行对比: 求陀螺仪偏置bg 求解公式相同,求解方法不同.公式如下,VI ...
- SpringMVC的Controller中使用线程安全的初始化
因为SpringMVC的Controller默认是单例, 在这种情况下, Controller中使用的私有变量必须也是单例, 例如各种service, 否则会有多线程访问数据互相修改的问题. 对于需要 ...
- Struts2中实现Web项目的初始化工作
Struts2中实现Web项目的初始化工作 注:通常web系统在启动时需要做一些初始化的工作,比如初始化系统全局变量,加载自定义配置文件,启动定时任务等. 一.在Struts中实现系统的初始化工作 ...
- [百度空间] [转] 在 Visual C++ 中控制全局对象的初始化顺序
from: http://blog.csdn.net/classfactory/archive/2004/08/07/68202.aspx 在 C++ 中,同一个翻译单位(.cpp文件)里的全局对象的 ...
- java中哪些数值不能被初始化
main方法中的变量不能被初始化 final修饰的变量不能被初始化·
- 如何设置vim中tab键缩进---配置初始化设置
转载自:http://blog.51cto.com/xuding/1725376:加了一些补充说明 问题: Linux系统下,Tab键默认为8个字符,需呀将其修改为4个字符的方式使用 步骤: 1.在用 ...
- linux内核中网络文件系统的注册初始化
针对内核3.9 系统开启时,会使用init/main.c,然后再里面调用kernel_init(),在里面会再调用do_basic_setup(),调用do_initcalls(),调用do_one_ ...
- 从以下哪一个选项中可以获得Servlet的初始化参数。
从以下哪一个选项中可以获得Servlet的初始化参数. A.Servlet B.ServletContext C.ServletConfig D.GenericServlet 解答:C servlet ...
- C++ 类中的static成员的初始化和特点
C++ 类中的static成员的初始化和特点 #include <iostream> using namespace std; class Test { public: Test() : ...
- 记一次uboot中gunzip解压速度慢的问题排查
背景 在项目中需要用到解压功能,之前还记录了下,将uboot解压代码移植到另外的bootloader中时,碰到的效率问题.最终查明是cache的配置导致的. https://www.cnblogs.c ...
随机推荐
- node 代理访问服务器
1.背景 由于在开发的过程中,我们经常需要访问测试/正式环境,会出现线上正常,本地访问不同 2.方案 方法一: 我们可以通过node作为中间件,解决这一问题.示例如下: var express = r ...
- Elasticsearch与Clickhouse数据存储对比
1 背景 京喜达技术部在社区团购场景下采用JDQ+Flink+Elasticsearch架构来打造实时数据报表.随着业务的发展Elasticsearch开始暴露出一些弊端,不适合大批量的数据查询,高频 ...
- windows下搭建docker容器环境
下载Docker Desktop https://www.docker.com/ 安装Docker Desktop(软件默认安装c盘,若要安装到其他盘,在安装之前创建软连接再进行安装) 在自定义磁盘中 ...
- go for range的坑
package main import "fmt" func main() { ParseStudent() } type student struct { Name string ...
- 开源超全Lotus Domino Xpages 开发资料,Domino最新资料,lotus资料,xpages资料,Domino开源信息下载
十年Domino资料,不断累积,精彩展示,从维护到开发,从CS到BS再变xpage,都是一步步过来,让Domino后台数据在在多个平台绽放 把这些开发技术文档分享出来,希望通过这个资料,为大家学习开发 ...
- PyInstaller 完美打包 Python 脚本,输出结构清晰、便于二次编辑的打包程序
引入问题 如果我要写一个 Python 项目,打包成 exe 运行(方便在没有 Python 的电脑上使用),我需要打包出的根目录结构美观,没有多余的.杂乱的依赖文件在那里碍眼,而且需要在发现 bug ...
- OSPF 多区域配置实验
实验拓扑 实验需求 按照图示配置 IP 地址和loopback 接口 按照图示分区域配置 OSPF ,实现全网互通 为了路由结构稳定,要求路由器使用环回口作为 Router-id 在AR3上配置静默接 ...
- 【技术积累】Python中的Pandas库【三】
什么是Series Series是一种带有标签的一维数组,可以容纳各种类型的数据(例如整数,浮点数和字符串).每个Series对象都有一个索引,它可以用来引用每个元素.Series对象的主要特征是可以 ...
- 智能合约HardHat框架环境的搭建
1.首先创建一个npm项目 PS C:\Users\lcds\blockchainprojects> mkdir hardhatcontract PS C:\Users\lcds\blockch ...
- Cisco show interface 命令详解
Router#show interface f0/2 FastEthernet0/2 is up, line protocol is up Hardware is Lance, address is ...