VINS中的重力-尺度-速度初始化(2)
VINS中的重力-尺度-速度初始化(2)
细化重力
\(\quad\)上一篇文章中得到的 \(g\) 一般是存在误差的。因为在实际应用中,当地的重力向量的模一般是已知固定大小的(所以只有两个自由度未知),而我们在前面求解时并没有利用这个条件,因此最后计算出来的重力向量很难刚好满足这个条件。于是,在vins的初始化中,还会对得到的重力向量进行修正。
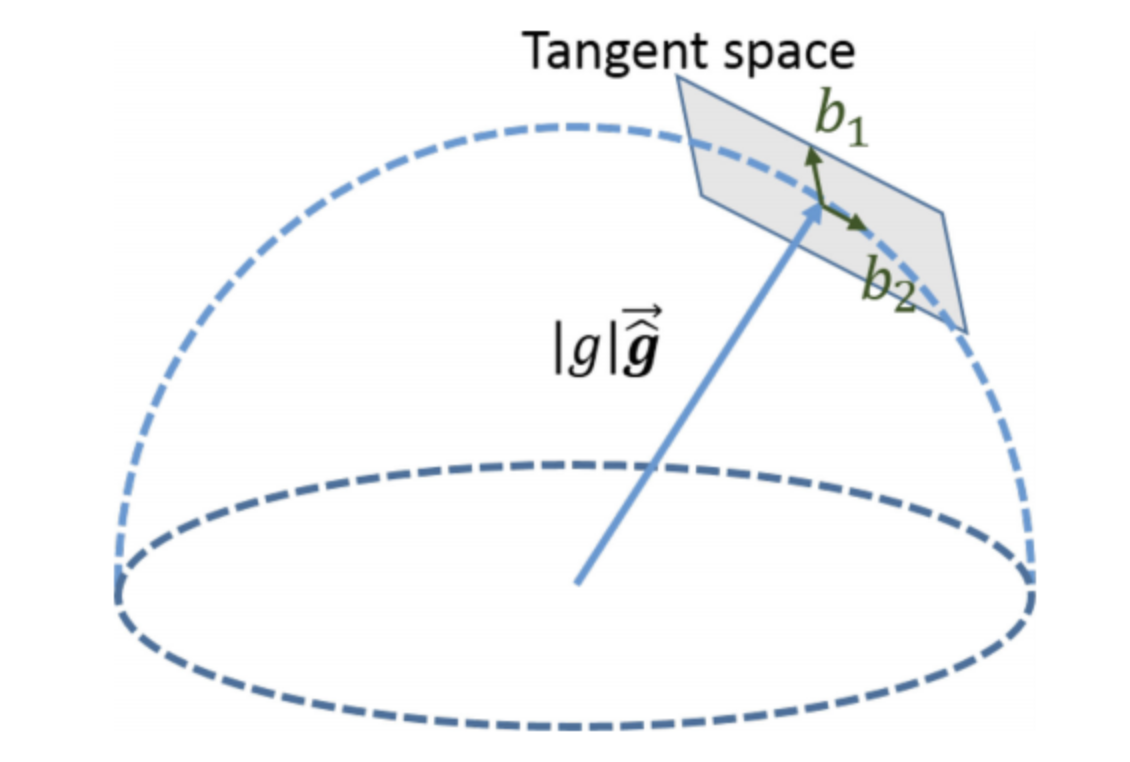
\(\quad\)首先,作者对重力向量进行参数化:
\]
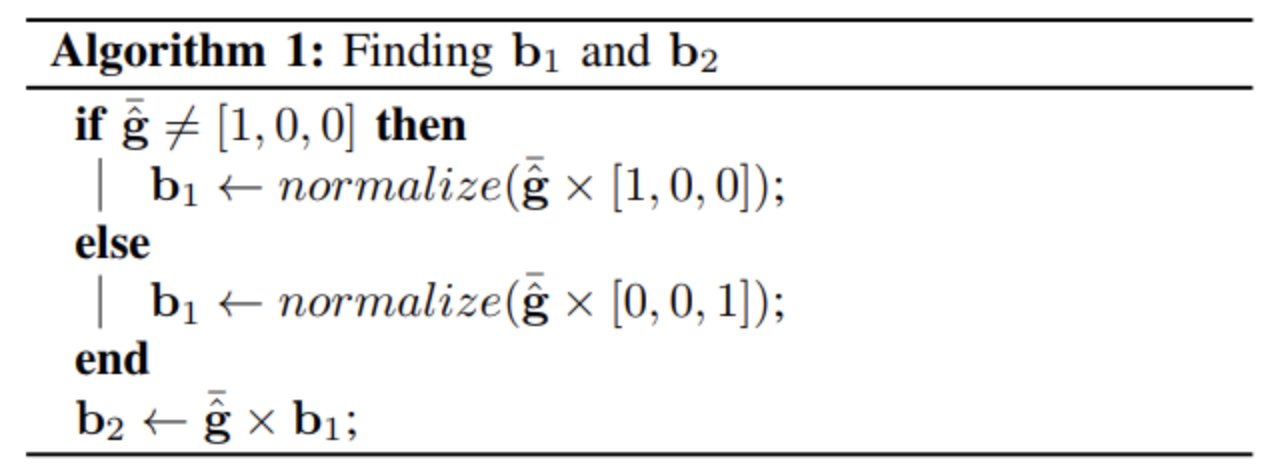
其中,\(\overline{\hat{g}}\)是上一步中估计得到的重力向量方向的单位向量,\(b_1\)与\(b_2\)是另外两个单位向量,是\(\overline{\hat{g}}\)切平面上的两个互相垂直的单位向量,获得方式如下:
此时我们可以从上面的式子知道,原本三维的优化变量 \(g^{c 0}\) 已经可以使用两维的 \(w^{2 \times 1}\) 替代。参考上一节的推导,待优化变量变成了
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w^{2 \times 1} \\
s
\end{array}\right]
\]
最后得到的观测方程也变为了
-I \Delta t_{k} & 0 & \frac{1}{2} R_{c_{0}}^{b_{k}} \Delta t_{k}^{2} \vec{b} & R_{c_{0}}^{b_{k}}\left(p_{c_{k+1}}^{c_{0}}-p_{c_{k}}^{c_{0}}\right) \\
-I & R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} & R_{c_{0}}^{b_{k}} \Delta t_{k} \vec{b} & 0
\end{array}\right]\left[\begin{array}{c}
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w \\
s
\end{array}\right]=\left[\begin{array}{c}
\alpha_{b_{k+1}}^{b_{k}}+R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} p_{c}^{b}-p_{c}^{b}-\frac{1}{2} R_{c_{0}}^{b_{c}} \Delta t_{k}^{2}\|g\| \hat{\hat{g}} \\
\beta_{b_{k+1}}^{b_{k}}-R_{c_{0}}^{b_{k}} \Delta t_{k}\|g\| \hat{g}
\end{array}\right]
\]
基于新得到的观测方程(可以使用LDLT分解求解),我们可以通过重力约束不断地对初始化结果进行修正,迭代对其 进行求解(vins中迭代了4次),最后得到一个修正后的初始化结果。
与世界坐标系对齐
这一步一般是最后一步,一般世界坐标系选择的是东北天坐标系。则这个对齐操作就是得到将重力向量旋转到Z轴上的旋转矩阵,这个旋转矩阵就是将原本坐标变换到世界坐标系(东北天坐标系)的变换矩阵。
找到这个变换矩阵后,接下来就是使用这个变换矩阵将位姿,速度等状态信息都变换到世界坐标系下。
加速度计bias
通过上面的阅读,我们会发现在vins的初始化中并没有对加速度计的bias进行估计,感觉对于超定的方程,多计算一个加速度计的bias好像也不是什么难事,,而且建模应该会更准确。在这个初始化工作的论文中其实有解释原因:
- 通过仿真实验证明,如果运动不剧烈,加速度计的bias很难被观测出来;
- 忽略加速计的bias对估计其他初始值的影响不大;
- 加速度计的bias是可以通过之后的VIO紧耦合优化,慢慢估计出来的;
参考资料
- [1] https://github.com/HKUST-Aerial-Robotics/VINS-Mono
- [2] VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator, Tong Qin, Peiliang Li, Zhenfei Yang, Shaojie Shen, IEEE Transactions on Robotics
- [3] https://xhy3054.github.io/
VINS中的重力-尺度-速度初始化(2)的更多相关文章
- VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)
初始化时需要求出的变量:相机和imu外参r t.重力g.尺度s.陀螺仪和加速度计偏置ba bg. 下面对两种算法初始化的详细步骤进行对比: 求陀螺仪偏置bg 求解公式相同,求解方法不同.公式如下,VI ...
- SpringMVC的Controller中使用线程安全的初始化
因为SpringMVC的Controller默认是单例, 在这种情况下, Controller中使用的私有变量必须也是单例, 例如各种service, 否则会有多线程访问数据互相修改的问题. 对于需要 ...
- Struts2中实现Web项目的初始化工作
Struts2中实现Web项目的初始化工作 注:通常web系统在启动时需要做一些初始化的工作,比如初始化系统全局变量,加载自定义配置文件,启动定时任务等. 一.在Struts中实现系统的初始化工作 ...
- [百度空间] [转] 在 Visual C++ 中控制全局对象的初始化顺序
from: http://blog.csdn.net/classfactory/archive/2004/08/07/68202.aspx 在 C++ 中,同一个翻译单位(.cpp文件)里的全局对象的 ...
- java中哪些数值不能被初始化
main方法中的变量不能被初始化 final修饰的变量不能被初始化·
- 如何设置vim中tab键缩进---配置初始化设置
转载自:http://blog.51cto.com/xuding/1725376:加了一些补充说明 问题: Linux系统下,Tab键默认为8个字符,需呀将其修改为4个字符的方式使用 步骤: 1.在用 ...
- linux内核中网络文件系统的注册初始化
针对内核3.9 系统开启时,会使用init/main.c,然后再里面调用kernel_init(),在里面会再调用do_basic_setup(),调用do_initcalls(),调用do_one_ ...
- 从以下哪一个选项中可以获得Servlet的初始化参数。
从以下哪一个选项中可以获得Servlet的初始化参数. A.Servlet B.ServletContext C.ServletConfig D.GenericServlet 解答:C servlet ...
- C++ 类中的static成员的初始化和特点
C++ 类中的static成员的初始化和特点 #include <iostream> using namespace std; class Test { public: Test() : ...
- 记一次uboot中gunzip解压速度慢的问题排查
背景 在项目中需要用到解压功能,之前还记录了下,将uboot解压代码移植到另外的bootloader中时,碰到的效率问题.最终查明是cache的配置导致的. https://www.cnblogs.c ...
随机推荐
- ODOO13之12:Odoo 13开发之报表和服务端 QWeb
报表是业务应用非常有价值的功能,内置的 QWeb 引擎是报表的默认引擎.使用 QWeb 模板设计的报表可生成 HTML 文件并被转化成 PDF.也就是说我们可以很便捷地利用已学习的 QWeb 知识,应 ...
- HyperPlatform
之前也写过一个vt的框架,但是比较简单,写的比较乱迁移什么的比较麻烦,于是阅读下HyperPlatform的源码学习下. 本文只对主体框架分析. vt的流程大概如下 1:检测是否支持VT. 2:vmx ...
- 【一步步开发AI运动小程序】十、姿态动作相似度比较
随着人工智能技术的不断发展,阿里体育等IT大厂,推出的"乐动力"."天天跳绳"AI运动APP,让云上运动会.线上运动会.健身打卡.AI体育指导等概念空前火热.那 ...
- [MAUI程序设计] 用Handler实现自定义跨平台控件
@ 目录 Handler 与Xamarin.Forms实现的区别 为什么要用Handler代替Renderer 解耦 生命周期管理 更细粒度的控制 用Effect来实现呢? 自定义手势监听控件 在各平 ...
- WWDC2023 Session系列:探索XCode15新特性
一.版本说明 XCode 15 beta 发布于 2023 年 6月5日, 可支持 macOS 13.3 或以上版本, 你可以按需下载需要的平台. 二.新增特性 1.代码智能提示 (Code comp ...
- C++ 核心指南之资源管理(中)
C++ 核心指南(C++ Core Guidelines)是由 Bjarne Stroustrup.Herb Sutter 等顶尖 C++ 专家创建的一份 C++ 指南.规则及最佳实践.旨在帮助大家正 ...
- asp登录认证,记录最后一次登录时间,写入数据库代码
最近开发了一个船员招聘网的程序,但是由于部分功能需要配合ASP代码才能使用,所以就发现以前写的这个asp登录认证代码,今天就将他公布一下. <!--#include file="con ...
- 【Python】爬虫-Xpath
Xpath 文章参考:https://www.cnblogs.com/mxjhaima/p/13775844.html#案例 安装 pip install lxml 引用 from lxml impo ...
- 【RabbitMQ】当队列中消息数量超过最大长度的淘汰策略
[RabbitMQ]当队列中消息数量超过最大长度的淘汰策略 说明 最近在研究RabbitMQ如何实现延时队列时发现消息进入死信队列的情况之一就是当消息数量超过队列设置的最大长度时会被丢入死信队列,看到 ...
- altas2.1.0编译、安装、集成CDH6.3.2
目录 altas2.1.0编译.安装.集成CDH6.3.2 一: Atlas源码下载 二: Atlas源码编译 1.修改altas项目主pom文件,即需要编译的CDH6.3.2对应版本信息 2.Atl ...