十九、eMMC驱动框架分析
一、MMC简介
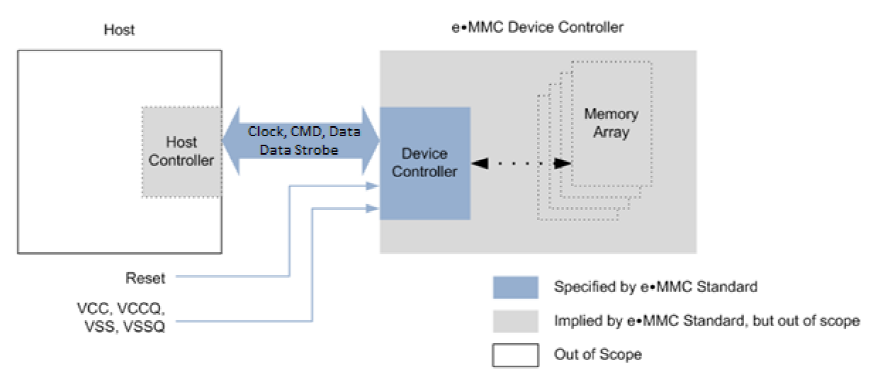
eMMC使用BGA封装了Nand Flash和Flash控制器,向外提供MMC标准接口,其结构图如下图所示(图来自《eMMC5.1官方标准协议》)。eMMC的出现使得手机厂商就能专注于产品开发的其它部分,并缩短向市场推出产品的时间。
对于我们来说,eMMC就是在Nand Flash上添加负责ECC、管理坏块等功能的控制器。
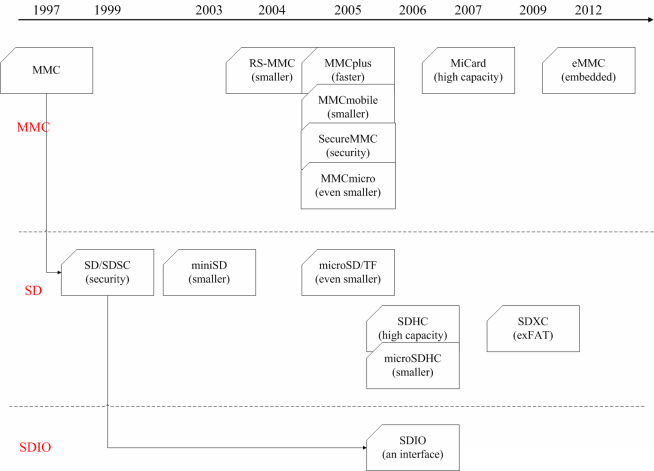
在内核中,使用MMC子系统统一管理MMC、SD、SDIO等设备。从MMC规范发布至今,基于不同的考量(物理尺寸、数据位宽和clock频率等),进化出了MMC、SD、microSD、SDIO、eMMC等不同的规范。其本质是一样的,这也是内核将它们统称为MMC的原因。
和MTD相同,MMC驱动也有一个单独的文件夹,位于drivers/mmc目录下,目录下的三个目录card、core、host对应MMC驱动的三个层次。
1. card:区块层,用于实现卡的块设备驱动。
2. core:核心层,抽象了卡的设备驱动的函数。
3. host:主机控制器层,依赖于不同平台的控制器操作函数。
二、MMC框架分析
为了方便分析框架,我们需要分析host目录,读者可在此目录下任意选择一个单板驱动文件进行分析,我选择的是s3cmci.c文件。
文件链接:
https://files.cnblogs.com/files/Lioker/19_emmc.zip
首先来看它的入口函数:
static int __init s3cmci_init(void)
{
return platform_driver_register(&s3cmci_driver);
}
我们进入platform_driver的probe函数中,看看它如何初始化。
static int __devinit s3cmci_probe(struct platform_device *pdev)
{
struct s3cmci_host *host;
struct mmc_host *mmc;
...
/* 分配mmc_host */
mmc = mmc_alloc_host(sizeof(struct s3cmci_host), &pdev->dev);
... /* 省略阶段做的是设置s3cmci_host成员和gpio管脚 */
request_irq(host->irq_cd, s3cmci_irq_cd, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, DRIVER_NAME, host));
...
/* 设置mmc_host */
mmc->ops = &s3cmci_ops;
mmc->ocr_avail = MMC_VDD_32_33 | MMC_VDD_33_34;
#ifdef CONFIG_MMC_S3C_HW_SDIO_IRQ
mmc->caps = MMC_CAP_4_BIT_DATA | MMC_CAP_SDIO_IRQ;
#else
mmc->caps = MMC_CAP_4_BIT_DATA;
#endif
mmc->f_min = host->clk_rate / (host->clk_div * );
mmc->f_max = host->clk_rate / host->clk_div; if (host->pdata->ocr_avail)
mmc->ocr_avail = host->pdata->ocr_avail; mmc->max_blk_count = ;
mmc->max_blk_size = ;
mmc->max_req_size = * ;
mmc->max_seg_size = mmc->max_req_size; mmc->max_segs = ;
...
/* 添加mmc_host */
ret = mmc_add_host(mmc);
...
platform_set_drvdata(pdev, mmc);
...
return ret;
}
其中,
1. mmc_alloc_host()函数调用关系如下:
mmc = mmc_alloc_host(sizeof(struct s3cmci_host), &pdev->dev);
-> host = kzalloc(sizeof(struct mmc_host) + extra, GFP_KERNEL);
/* 初始化工作队列 */
-> INIT_DELAYED_WORK(&host->detect, mmc_rescan);
2. mmc_add_host()函数调用关系如下:
mmc_add_host(mmc);
-> device_add(&host->class_dev);
-> mmc_start_host(host);
-> mmc_power_off(host); /* 掉电刷新 */
-> mmc_detect_change(host, );
-> mmc_schedule_delayed_work(&host->detect, delay);
/* 在工作队列中添加一个延迟的工作任务host->detect */
-> return queue_delayed_work(workqueue, work, delay);
mmc_add_host()函数最终会调用mmc_alloc_host()初始化工作队列的mmc_rescan()函数。此函数用于检测是否有卡插入了卡控制器。
void mmc_rescan(struct work_struct *work)
{
static const unsigned freqs[] = { , , , };
struct mmc_host *host = container_of(work, struct mmc_host, detect.work);
int i;
...
mmc_bus_get(host); /* 检测卡是否仍旧存在 */
if (host->bus_ops && host->bus_ops->detect && !host->bus_dead
&& !(host->caps & MMC_CAP_NONREMOVABLE))
host->bus_ops->detect(host); /* If the card was removed the bus will be marked
* as dead - extend the wakelock so userspace
* can respond */
if (host->bus_dead)
extend_wakelock = ; /*
* Let mmc_bus_put() free the bus/bus_ops if we've found that
* the card is no longer present.
*/
mmc_bus_put(host);
mmc_bus_get(host); /* 如果卡仍存在, stop here */
if (host->bus_ops != NULL) {
mmc_bus_put(host);
mmc_set_drv_state(e_inserted,host);//ly
goto out;
} /*
* Only we can add a new handler, so it's safe to
* release the lock here.
*/
mmc_bus_put(host); /* 卡不存在,释放 */
if (host->ops->get_cd && host->ops->get_cd(host) == ){
mmc_set_drv_state(e_removed,host);
goto out;
}
mmc_claim_host(host);
for (i = ; i < ARRAY_SIZE(freqs); i++) {
if (!mmc_rescan_try_freq(host, max(freqs[i], host->f_min))) {
extend_wakelock = true;
break;
}
if (freqs[i] <= host->f_min)
break;
}
mmc_release_host(host); out:
if (extend_wakelock)
wake_lock_timeout(&host->detect_wake_lock, HZ / );
else
wake_unlock(&host->detect_wake_lock);
if (host->caps & MMC_CAP_NEEDS_POLL) {
wake_lock(&host->detect_wake_lock);
mmc_schedule_delayed_work(&host->detect, HZ);
}
}
probe()函数所做的有以下几点:
1. 分配、设置并添加mmc_host
2. 检测卡是否插入了卡控制器
如果在probe()函数执行时,卡并没有插入呢?也就是除了probe()函数,一定会有其他函数最终调用了mmc_rescan()函数。现在我们需要重新看一遍probe()函数,它注册了一个中断函数s3cmci_irq_cd()。
static irqreturn_t s3cmci_irq_cd(int irq, void *dev_id)
{
struct s3cmci_host *host = (struct s3cmci_host *)dev_id;
dbg(host, dbg_irq, "card detect\n"); mmc_detect_change(host->mmc, msecs_to_jiffies()); return IRQ_HANDLED;
}
之前分析过,mmc_detect_change(host->mmc, msecs_to_jiffies(500));函数最终会调用mmc_rescan()函数。
此时如果有卡插入了,会调用到mmc_rescan()函数,此函数调用关系如下:
mmc_rescan(struct work_struct *work)
-> mmc_rescan_try_freq(host, max(freqs[i], host->f_min))
-> mmc_attach_sdio(host) /* 检测卡的类型 */
-> mmc_attach_sd(host)
-> mmc_attach_mmc(host)
-> mmc_send_op_cond(host, , &ocr); /* 发送卡的ID */
-> mmc_init_card(host, host->ocr, NULL); /* 初始化mmc_card */
-> card = mmc_alloc_card(host, &mmc_type);
-> device_initialize(&card->dev);
-> card->dev.bus = &mmc_bus_type; /* 设置总线为mmc_bus_type */
-> card->type = MMC_TYPE_MMC; /* 设置card结构体 */
-> mmc_release_host(host);
-> mmc_add_card(host->card); /* 添加卡mmc_card */
-> device_add(&card->dev);
-> mmc_claim_host(host); /* 使能host */
在添加mmc_card调用device_add()函数时,mmc_bus_type总线会调用match()函数匹配设备驱动,如果匹配成功会调用总线的probe()函数或设备驱动的probe()函数。
static int mmc_bus_match(struct device *dev, struct device_driver *drv)
{
return ; /* 匹配永远成功 */
}
probe()函数最终会调用mmc_driver的probe()函数。
static int mmc_bus_probe(struct device *dev)
{
struct mmc_driver *drv = to_mmc_driver(dev->driver);
struct mmc_card *card = mmc_dev_to_card(dev); return drv->probe(card);
}
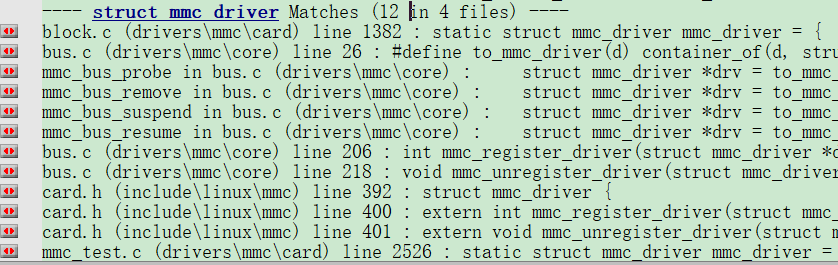
在SI4的Project中搜索struct mmc_driver,发现只有block.c文件有对此结构体的定义。
现在我们来查看mmc_driver的probe()函数。
static int mmc_blk_probe(struct mmc_card *card)
{
struct mmc_blk_data *md, *part_md;
int err;
char cap_str[];
...
md = mmc_blk_alloc(card); err = mmc_blk_set_blksize(md, card);
...
mmc_set_drvdata(card, md);
mmc_fixup_device(card, blk_fixups);
...
if (mmc_add_disk(md))
goto out; list_for_each_entry(part_md, &md->part, part) {
if (mmc_add_disk(part_md))
goto out;
}
return ; out:
mmc_blk_remove_parts(card, md);
mmc_blk_remove_req(md);
return err;
}
其中,
1. mmc_blk_alloc()函数调用关系如下:
md = mmc_blk_alloc(card);
-> md = mmc_blk_alloc_req(card, &card->dev, size, false, NULL);
-> md->disk = alloc_disk(perdev_minors);
-> ret = mmc_init_queue(&md->queue, card, &md->lock, subname);
-> mq->queue = blk_init_queue(mmc_request, lock);
-> set_capacity(md->disk, size);
2. mmc_add_disk()函数调用关系如下:
mmc_add_disk(md)
-> add_disk(md->disk);
-> device_create_file(disk_to_dev(md->disk), &md->force_ro);
这个mmc_driver底层做的与块设备驱动相同:
1. 分配、初始化请求队列,绑定请求队列和请求函数
2. 分配、设置并添加gendisk
3. 注册块设备驱动
队列函数为mmc_blk_issue_rq(),其调用关系如下:
mmc_blk_issue_rq
-> mmc_blk_issue_secdiscard_rq(mq, req);
-> mmc_blk_issue_discard_rq(mq, req);
-> mmc_blk_issue_flush(mq, req);
-> mmc_blk_issue_rw_rq(mq, req); /* 上面四个函数选一个执行 */
-> mmc_wait_for_req(card->host, &brq.mrq);
-> mmc_start_request(host, mrq);
-> host->ops->request(host, mrq); /* s3cmci.c中host->requset = s3cmci_request */
三、MMC驱动框架总结
1. 各个结构体作用:
struct mmc_card用于描述卡,struct mmc_driver用于描述卡驱动,sutrct mmc_host用于描述卡控制器,struct mmc_host_ops用于描述卡控制器操作函数。
2. 整体框架:

下一章 二十、网卡框架分析和虚拟网卡驱动和DM9621驱动分析
十九、eMMC驱动框架分析的更多相关文章
- uart驱动框架分析(二)uart_add_one_port
作者:lizuobin (百问网论坛答疑助手) 原文: https://blog.csdn.net/lizuobin2/article/details/51801183 (所用开发板:mini2440 ...
- Linux USB驱动框架分析(2)【转】
转自:http://blog.chinaunix.net/uid-23046336-id-3243543.html 看了http://blog.chinaunix.net/uid-11848011 ...
- Linux USB驱动框架分析 【转】
转自:http://blog.chinaunix.net/uid-11848011-id-96188.html 初次接触与OS相关的设备驱动编写,感觉还挺有意思的,为了不至于忘掉看过的东西,笔记跟总结 ...
- linux驱动基础系列--linux spi驱动框架分析
前言 主要是想对Linux 下spi驱动框架有一个整体的把控,因此会忽略某些细节,同时里面涉及到的一些驱动基础,比如平台驱动.设备模型等也不进行详细说明原理.如果有任何错误地方,请指出,谢谢! spi ...
- linux驱动基础系列--linux spi驱动框架分析(续)
前言 这篇文章是对linux驱动基础系列--linux spi驱动框架分析的补充,主要是添加了最新的linux内核里设备树相关内容. spi设备树相关信息 如之前的文章里所述,控制器的device和s ...
- Linux USB驱动框架分析【转】
转自:http://blog.csdn.net/jeffade/article/details/7701431 Linux USB驱动框架分析(一) 初次接触和OS相关的设备驱动编写,感觉还挺有意思的 ...
- 【原创】Linux PCI驱动框架分析(二)
背 景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本 ...
- 【原创】Linux PCI驱动框架分析(三)
背 景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本 ...
- camera驱动框架分析(上)【转】
转自:https://www.cnblogs.com/rongpmcu/p/7662738.html 前言 camera驱动框架涉及到的知识点比较多,特别是camera本身的接口就有很多,有些是直接连 ...
随机推荐
- JAVA日志工具类
package com.ming.util; import java.io.File; import java.io.FileWriter; import java.io.IOException; i ...
- IdHTTPServer允许跨域访问
IdHTTPServer允许跨域访问 procedure TMain.idHttpServerCommandGet(AContext: TIdContext; ARequestInfo: TIdHTT ...
- Python 3.8.0 final¶ Release date: 2019-10-14
https://docs.python.org/3.8/whatsnew/changelog.html#python-3-8-0 Core and Builtins bpo-38469: Fixed ...
- Python带参数的函数装饰器
# -*- coding: utf-8 -*- # author:baoshan # 带参数的函数装饰器 def say_hello(country): def wrapper(func): def ...
- 三、HTTP响应
HTTP消息是服务器和客户端之间交换数据的方式 有两种类型的消息: 请求--由客户端发送用来触发一个服务器上的动作 相应--来自服务器的应答 一.HTTP响应的构成 1.状态行 HTTP响应的起始行被 ...
- 虚拟机的Vmtools
安装了虚拟机之后,文件共享不方便,安装VMTools可以在windows上直接拖文件到linux上. 安装方法: 1.进入linux把CD弹出 2.打开虚拟机之后 3.下载完成可以在linux的CD设 ...
- PP篇7 生产替代料齐套后处理
扫描可关注本人技术分享公众号,与您一起学习新知! 对于计划订单和生产订单, 当存在替代料的时候,完成齐套性检查后,按照可齐套量进行拆单,并删除不能齐套的替代料(有个删除规则).不能齐套就按照优先级最高 ...
- Python - Django - JsonResponse 对象
用 json 模块和 HttpResponse 返回生成的 json views.py: from django.shortcuts import render, HttpResponse impor ...
- vfp
DROP 从目前资料库中移出资料表格,并从磁碟上将它删除.DELETE 标示要删除的记录.只是标记,没有删除.ZAP 从资料表格中移除所有记录,仅保留资料表格结构.PACK 从目前资料库中移除标示为删 ...
- DevOps - DevOps精要 - 歧途
前言 如果在实施DevOps的过程中,周围没有一个人支持你,也没有得到领导和团队成员的理解: 如果在采用DevOps的工具和方法之后,难以获得明显的效率提升,甚至得到了不少的消极反馈: 那就需要反省一 ...