FPGA的SPI从机模块实现
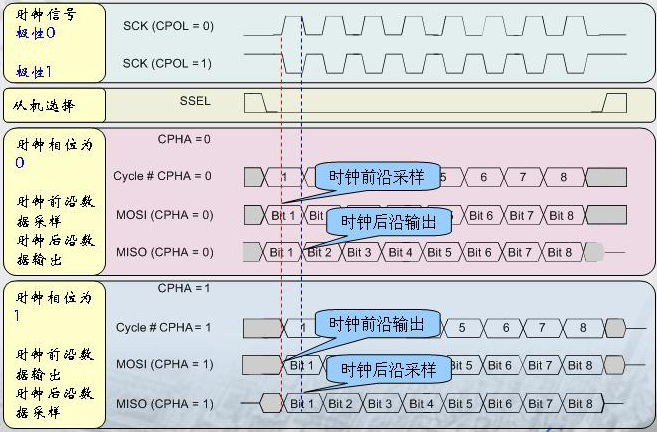
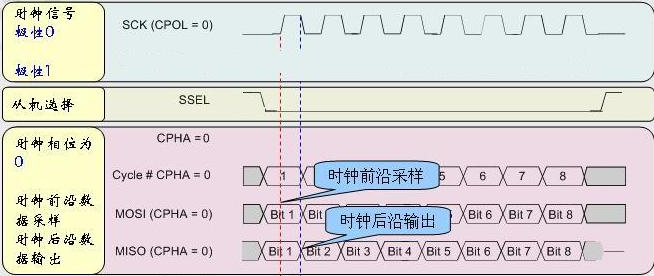
一. SPI总线协议
二. FPGA的SPI从机实现
1. 首先确定模块的输出输入管脚
module myspi(nrst, clk, ncs, mosi, miso, sck);
input clk, nrst;
input ncs, mosi, sck;
output miso;
2. SCK跳变沿检测
reg[2:0] sck_edge;
always @ (posedge clk or negedge nrst)
begin
if(~nrst)
begin
sck_edge <= 3'b000;
end
else
begin
sck_edge <= {sck_edge[1:0], sck};
end
end
wire sck_riseedge, sck_falledge;
assign sck_riseedge = (sck_edge[2:1] == 2'b01); //检测到SCK由0变成1,则认为发现上跳沿
assign sck_falledge = (sck_edge[2:1] == 2'b10); //检测到SCK由1变成0,则认为发现下跳沿
3. SPI接收部分
SPI接收部分使用有限状态机:
reg[7:0] byte_received;
reg[3:0] bit_received_cnt;
reg rec_flag;
reg[1:0] rec_status; //SPI接收部分状态机
reg[7:0] rec_data;
reg[2:0] rec_flag_width; //SPI接收完成标志位脉冲宽度寄存器
always @ (posedge clk or negedge nrst) //每次sck都会接收数据,spi的顶端模块状态机决定是否取用
begin
if(~nrst)
begin
byte_received <= 8'h00;
bit_received_cnt <= 4'h0;
rec_flag <= 1'b0;
rec_status <= 2'b00;
rec_flag_width <= 3'b000;
end
else
begin
if(~ncs)
begin
case (rec_status)
2'b00: begin
if(sck_riseedge)
begin
byte_received <= {byte_received[6:0], mosi};
if(bit_received_cnt == 4'h7)
begin
bit_received_cnt <= 4'b0000;
rec_status <= 2'b01;
end
else
begin
bit_received_cnt <= bit_received_cnt+1;
end
end
end
2'b01: begin
rec_data <= byte_received;
rec_flag <= 1'b1;
if(rec_flag_width==3'b100) begin
rec_flag_width <= 3'b000;
rec_status <= 2'b11;
end
else begin
rec_flag_width <= rec_flag_width+1;
end
end
2'b11: begin
rec_flag <= 1'b0;
rec_status <= 2'b00;
end
endcase
end
end
end
这里,使用rec_flag的原因是通知另一个模块处理接收数据(后面将会提到),rec_data若在下一次数据传输完成前不做处理则会丢失。
4. SPI发送部分
reg miso;
reg sending_flag; //正在发送标志位
reg[7:0] byte_sended; //发送移位寄存器
reg[3:0] bit_sended_cnt; //SPI发送位计数器
reg[1:0] send_status; //SPI发送部分状态机
always @ (posedge clk or negedge nrst)
begin
if(~nrst)
begin
byte_sended <= 8'h00;
bit_sended_cnt <= 4'b0000;
send_status <= 2'b00;
sending_flag <= 1'b0;
end
else
begin
if(~ncs)
begin
case (send_status)
2'b00: begin
if(send_flag)
begin //锁存发送数据
send_status <= 2'b01; //2'b01;
byte_sended <= send_data;
sending_flag <= 1'b1;
miso <= send_data[7];
end
end
2'b01: begin //发送数据移入移位寄存器
if(sck_riseedge) begin
//miso <= byte_sended[7];
//byte_sended <= {byte_sended[6:0], 1'b0};
send_status <= 2'b11;
end
end
2'b11: begin //根据sck下降沿改变数据
miso <= byte_sended[7];
if(sck_falledge) ///---------------------------------------这里多移了一位
begin
//miso <= byte_sended[7];
byte_sended <= {byte_sended[6:0], 1'b0};
if(bit_sended_cnt == 4'b0111)
begin
send_status <= 2'b10;
bit_sended_cnt <= 4'b0000;
sending_flag <= 1'b0;
end
else
begin
bit_sended_cnt <= bit_sended_cnt+1;
end
end
end
2'b10: begin //数据发送完毕
send_status <= 2'b00;
//sending_flag <= 1'b0;
miso <= 1'b0;
end
endcase
end
end
end
经过实测,SCK频率低于clk频率8倍以上,通信可靠稳定,测试芯片为XC3S50-TQ144,平台为ISE,clk为25MHz。
FPGA的SPI从机模块实现的更多相关文章
- 如何让FPGA中的SPI与其他模块互动起来
在上一篇文章<FPGA的SPI从机模块实现>中,已经实现了SPI的从机模块,如何通过SPI总线与FPGA内部其他模块进行通信,是本文的主要讨论内容. 一. 新建FPGA内部DAC控制模块 ...
- FPGA构造spi时序——AD7176为例(转)
reference:https://blog.csdn.net/fzhykx/article/details/79490330 项目中用到了一种常见的低速接口(spi),于是整理了一下关于spi相关的 ...
- IIS7注册本机模块
问题描述:打开mp4文件要映射给mod_h264_streaming.dll(http://h264.code-shop.com/trac/wiki/Mod-H264-Streaming-Intern ...
- python开发学习-day09(队列、多路IO阻塞、堡垒机模块、mysql操作模块)
s12-20160312-day09 *:first-child { margin-top: 0 !important; } body>*:last-child { margin-bottom: ...
- 基于FPGA的SPI FLASH控制器设计
1.SPI FLASH的基本特征 本文实现用FPGA来设计SPI FLASH,FLASH型号为W25Q128BV.支持3种通信方式,SPI.Dual SPI和Quad SPI.FLASH的存储单元无法 ...
- ARM与FPGA通过spi通信设计2.spi master的实现
这里主要放两个代码第一个是正常的不使用状态机的SPI主机代码:第二个是状态机SPI代码 1.不使用状态机:特权同学<深入浅出玩转FPGA>中DIY数码相框部分代码: /////////// ...
- ARM与FPGA通过spi通信设计1.spi基础知识
SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息.SPI总线可直接与各个厂家生产 ...
- 嵌入式驱动开发之dsp fpga通信接口---spi串行外围接口、emif sram接口
-----------------------------------------author:pkf ------------------------------------------------ ...
- FPGA之SPI SD卡读操作
这几天在FPGA调试与SD通信,读SD卡里的图片,之前接触32时没有去研究过SD卡,不太熟悉操作流程,在网上找了很多资料,也看了几个32开发板的资料,但大多数都讲得不是特别清楚,只能瞎操作了一番,在别 ...
随机推荐
- Redhat关闭SELinux和防火墙的办法(转)
Redhat使用了SELinux来增强安全,关闭的办法为:1. 永久有效修改 /etc/selinux/config 文件中的 SELINUX="" 为 disabled ,然后重 ...
- Qt Creator编译时:cannot open file 'debug\QtGuiEx.exe' File not found
Qt Creator编译时:cannot open file 'debug\QtGuiEx.exe' File not found 利用Qt Creator编译工程时,出现如题目所示的错误,其中红色部 ...
- Jekins安装
1. Jekins支持多系统:windows, mac,linux 2. Jekins安装方式有三种:直接war文件安装,安装包安装,将war文件放到web容器安装 3. 在windows下安装 a. ...
- Unity 制作RPG地图2(自己控制地图上图标)
上一次用Unity摄像机方式实现了地图的制作,现在介绍另一种实现地图的方式: 自己通过代码实现小地图NCP图标的显示和隐藏 制作地图的步骤: 1. 根据游戏人物的3D坐标转换成2D平面坐标,根据距离显 ...
- Django 从零開始
1.下载安装django 方法1: pip install Django==1.6.5 測试是否成功安装 : ~$ python import django ~$ (1, 6, 5, 'final', ...
- quick-cocos2d-x android返回键监听并实现原生退出对话框
这两天最终闲了一下,就顺手又把quick捡起来又学了学,一直都认为quick比cocos2dx那套lua绑定要方便很多,今天试了下android返回键的监听,还是挺好弄的,所以就有了这篇. 首先说明一 ...
- android XML解析之DOM解析方式
DOM 解析方式步骤: 第一步:首选需要获得DOM解析器工厂实例 DocumentBuilderFactory factory = DocumentBuilderFactory.newInstance ...
- Sharepoint2010 通过 WebFeature 修改web.config
using System;using System.Runtime.InteropServices;using System.Security.Permissions;using Microsoft. ...
- mvc ajax请求
@{ ViewBag.Title = "ajax"; } <script src="../../Scripts/jquery-1.4.4.js" type ...
- Median of Two Sorted Arrays(Java)
求2个数组的中位数 方法很多 但是时间复杂度各异 1利用数组copy方法先融合两个数组,然后排序,找出中位数 import java.lang.reflect.Array; import java.u ...