ROS librviz库
1、可视化管理类:rviz::VisualizationManager
The VisualizationManager class is the central manager class of rviz, holding all the Displays, Tools, ViewControllers, and other managers.
It keeps the current view controller for the main render window. It has a timer which calls update() on all the displays. It creates and holds pointers to the other manager objects: SelectionManager, FrameManager, the PropertyManager s, and Ogre::SceneManager.
/**
* \brief Constructor
* Creates managers and sets up global properties.
* @param render_panel a pointer to the main render panel widget of the app.
* @param wm a pointer to the window manager (which is really just a
* VisualizationFrame, the top-level container widget of rviz).
*/
explicit VisualizationManager(RenderPanel* render_panel, WindowManagerInterface* wm = nullptr);
在使用librviz时一般需要创建一个VisualizationManager对象,创建时给它指定渲染窗口RenderPanel,如下为在一个Qt运用的主窗口中嵌入librviz渲染窗口的示例:
// 创建渲染窗口,并将其添加到Qt主窗口布局中 render_panel_ = new rviz::RenderPanel();
QVBoxLayout* main_layout = new QVBoxLayout;
main_layout->addLayout( controls_layout );
main_layout->addWidget( render_panel_ );
setLayout( main_layout ); // 创建可视化管理对象 manager_ = new rviz::VisualizationManager( render_panel_ ); // 为渲染窗口关联场景相机及渲染上下文
render_panel_->initialize( manager_->getSceneManager(), manager_ ); // 初始化操作(必须,)
manager_->initialize(); // 启动刷新定时器,定时刷新librviz中的显示窗口
manager_->startUpdate();
用于管理Display的接口,Display就是rviz中左侧面板中可以显示的网格、坐标轴、话题等可视化元素
// 用于管理Display的接口,Display就是rviz中左侧面板中可以显示的网格、坐标轴、话题等可视化元素
/**
* \brief Create and add a display to this panel, by class lookup name
* @param class_lookup_name "lookup name" of the Display subclass, for pluginlib.
* Should be of the form "packagename/displaynameofclass", like "rviz/Image".
* @param name The name of this display instance shown on the GUI, like "Left arm camera".
* @param enabled Whether to start enabled
* @return A pointer to the new display.
*/
Display* createDisplay(const QString& class_lookup_name, const QString& name, bool enabled); /**
* \brief Add a display to be managed by this panel
* @param display The display to be added
*/
void addDisplay(Display* display, bool enabled); /**
* \brief Remove and delete all displays
*/
void removeAllDisplays();
示例:添加点云话题显示
m_pointCloud2 = m_rvizManager->createDisplay("rviz/PointCloud2","pointCloud2", true);
ROS_ASSERT(m_pointCloud2 != nullptr);
m_pointCloud2->subProp("Topic")->setValue("/pcd_points");
m_pointCloud2->subProp("Unreliable")->setValue("false");
m_pointCloud2->subProp("Selectable")->setValue("true");
m_pointCloud2->subProp("Style")->setValue("Flat Squares");
m_pointCloud2->subProp("Size (m)")->setValue("0.1");
m_pointCloud2->subProp("Alpha")->setValue("1");
m_pointCloud2->subProp("Decay Time")->setValue("0");
m_pointCloud2->subProp("Position Transformer")->setValue("XYZ");//
m_pointCloud2->subProp("Color Transformer")->setValue("Intensity");
m_pointCloud2->subProp("Queue Size")->setValue("10");
m_pointCloud2->subProp("Use rainbow")->setValue("true");
m_pointCloud2->subProp("Invert Rainbow")->setValue("false");
m_pointCloud2->subProp("Autocompute Intensity Bounds")->setValue("true");
// m_pointCloud2->subProp("Min Intensity")->setValue("1");
// m_pointCloud2->subProp("Max Intensity")->setValue("255");
m_rvizManager->setFixedFrame("hx_map");
rviz/PointCloud2是rviz提供的默认插件,其所有的属性设置均显示在左侧面板: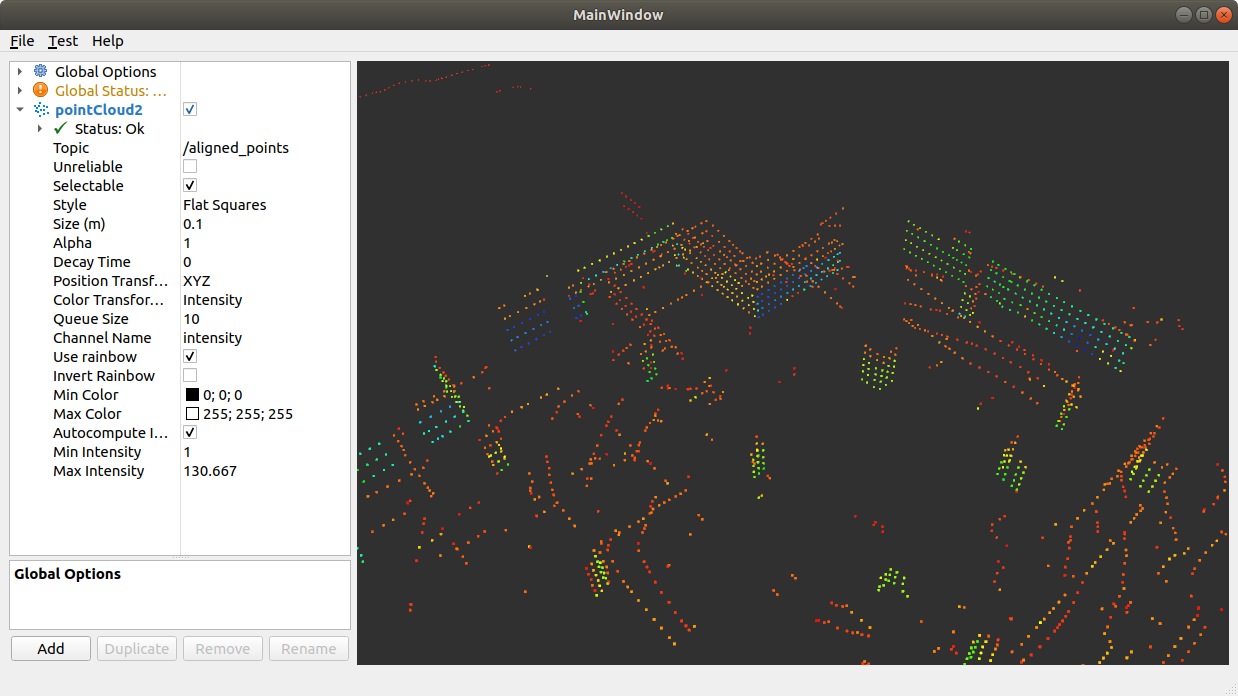
参考坐标系设置获取接口:
/** @brief Return the fixed frame name.
* @sa setFixedFrame() */
QString getFixedFrame() const override; /** @brief Set the coordinate frame we should be transforming all fixed data into.
* @param frame The name of the frame -- must match the frame name broadcast to libTF
* @sa getFixedFrame() */
void setFixedFrame(const QString& frame);
rviz配置保存与加载
/** @brief Load the properties of each Display and most editable rviz data.
*
* This is what is called when loading a "*.rviz" file.
*
* @param config The Config object to read from. Expected to be a Config::Map type.
* @sa save()
*/
void load(const Config& config); /**
* \brief Save the properties of each Display and most editable rviz
* data.
*
* This is what is called when saving a "*.vcg" file.
* \param config The object to write to.
* \sa loadDisplayConfig()
*/
void save(Config config) const;
还有其他接口暂未用到,具体可查看头文件:rviz/visualization_manager.h
ROS librviz库的更多相关文章
- ROS常用库(四)API学习之常用common_msgs(下)
一.前言 承接ROS常用库(三)API学习之常用common_msgs(上). 二.sensor_msgs 1.sensor_msgs / BatteryState.msg #电源状态 uint8 P ...
- ROS常用库(二) Serial库(单片机和上位机串口通讯)
比如我们做了个单片机,在win里面用串口调试助手接收和下发数据,那么在ubuntu里用ros怎么实现?换个说法,怎么实现上位机和下位机的通讯? 首先,用python自带的库就可以实现这个功能. 安装p ...
- TX2 安装 ROS 依赖库错误解决办法
一.更换ubuntu 16.04 更新源 1. 更新源 deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse rest ...
- ROS常用库(五)navigation之Tutorials
一.TF 详见古月居 https://www.guyuehome.com/355 重点:广播TF,订阅,编译时Cmakelist添加编译选项 broadcaster.sendTransform( tf ...
- ROS常用库(三)API学习之常用common_msgs(上)
一.概述 common_msgs包含其他ROS软件包广泛使用的消息.这些消息包括动作消息(actionlib_msgs),诊断消息(diagnostic_msgs),几何图元(geometry_msg ...
- ROS常用库(一) fake_localization
wiki是最好的学习资料,以下直接参考了wiki官网.另外po出官网网址,建议英语较好的朋友之接看原版 http://wiki.ros.org/fake_localization 概述 fake_lo ...
- ROS初探:(一)ROS架构
一.ROS架构 ROS架构上分为三个层级: 计算图级(Computation Graph level):体现进程与系统的关系,描述系统怎么运行. 文件系统级(Filesystem level):组织构 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- 关于ROS学习的一些反思
距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧.这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用 ...
随机推荐
- Navicat破解教程
一.注意: 软件适用于WIN7/8/10/11: 安装全程断网: 下载.解压和安装都应该在英文路径下进行: 解压安装前关闭所有杀毒软件,WIN10/11系统需关闭Windows Defender的实时 ...
- 【QT开发问题】使用自定义的QGroupBox,重写绘图事件paintEvent后边框消失的问题
问题描述 Qt界面开发过程中,使用自定义的QGroupBox,重写绘图事件paintEvent时,出现边框被覆盖的情况,或边框消失的问题. 左图是原始状态,直接重写绘图事件后,会变成右图空白状态. ...
- if多条件判断
在一个if语句中,括号里面包含多个条件时.条件是否被执行要看if语句里面各个条件是"与"的关系还是"或"的关系. #include<stdio.h> ...
- S2-013 CVE-2013-1966
漏洞名称 S2-013 CVE-2013-1966 远程命令执行 利用条件 Struts 2.0.0 - Struts 2.3.14.1 漏洞原理 Struts2 标签中 <s:a> 和 ...
- Spring MVC复习 —— 搭建Spring MVC项目
Spring MVC复习 -- 搭建Spring MVC项目 摘要:这篇笔记是关于Spring MVC的复习,内容是如何搭建Spring MVC项目. 让我们快速的搭建一个Spring MVC ...
- 单例 pickle模块
今日内容 单例模式实现的多种方式 方式一: class C1: __instance = None def __init__(self,name,age): self.name = name self ...
- [BUUCTF]洞拐洞拐洞洞拐
[BUUCTF] 洞拐洞拐洞洞拐 问题链接:https://buuoj.cn/challenges#洞拐洞拐洞洞拐 问题附件是一张图片. 一. 图片分析 查看图片,发现是由有规律的黑白像素构成的PNG ...
- DVWA系列3:CSRF
DVWA系列3:CSRF 前言 CSRF(Cross-site request forgery),即跨站请求伪造,是一种挟制用户在当前已登录的Web应用程序上执行非本意的操作的攻击方法. 比如说,用户 ...
- Redis 异步客户端选型及落地实践
作者:京东科技 王晨 Redis异步客户端选型及落地实践 可视化服务编排系统是能够通过线上可视化拖拽.配置的方式完成对接口的编排,可在线完成服务的调试.测试,实现业务需求的交付,详细内容可参考:htt ...
- 顺手写的redis分布式锁
/** * 锁定一个key,***一定要手工释放锁 * * @param key * @return */ public boolean lockKey(String key) { return re ...