Rock18框架之整体框架介绍
1. 总体框架图
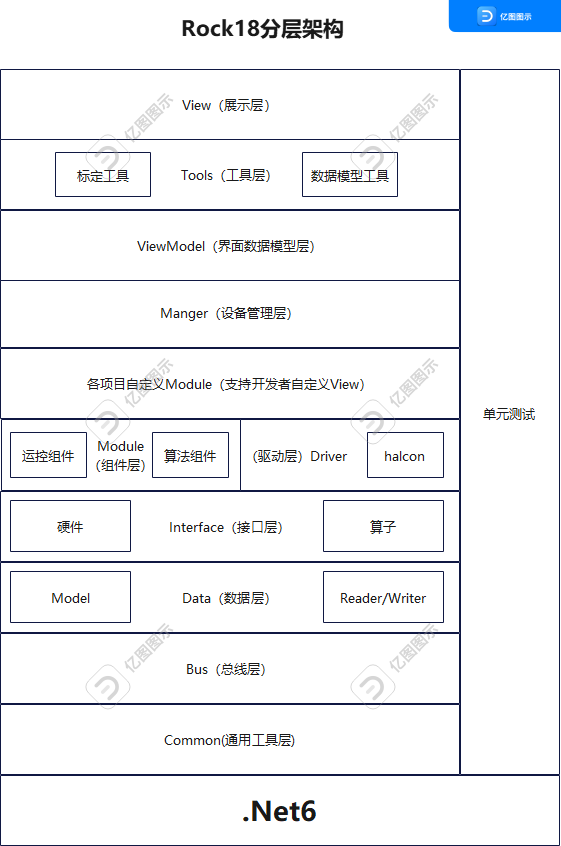
2.框架能解决哪些问题?
问题1:
自动化设备包含龙门架、机械手、伺服、步进等电机、IO控制、定位及纠偏、界面展示等部分。其中硬件(伺服、IO等)是需要更换的,硬件的更换不影响整套系统,不影响指:逻辑无影响、代码无编辑。
解决思路:
1、面向接口编程,所有硬件及算法在业务逻辑层都是接口
2、接口自动依赖注入,所有接口通过manger层反射、注入方式实例化接口
3、变更硬件只新增对应接口实现即可,所有业务代码无需更改
问题2:
一台机器有很多通用的组件,如皮带、升降、翻转等,重复的逻辑太多,怎么减少重复逻辑?
解决办法:
1、组件化设计,把机器的皮带当成一个组件,升降为一个组件,一台机器是有N个独立组件构成,组件之间通过IO来交互(这部分思路参考一条整线有印刷机,贴片机、AOI等组成,机器之间通过IO来交互,机器内部也可以看做一条整线,由各个组件通过IO交互。只是交互是通过虚拟IO)
问题3:
组件抽象出来后,组件内部的编程模型怎么抽象,才能让编程更为简单方便?
解决办法:
有限状态机模型,组件内部定义为很多状态,每个状态下做指定的动作,满足条件后跳转到下一个状态。
3.案例
-下面是一个从升降台取载具到轨道上,然后从升降台取pcb放在载具上,最后流出的一个组件,里面包涵了下相机定位,载具定位,cpk扣合检测的组件代码(这是rock17框架下组件实现,rock18已引入状态机,后续博文会介绍基于状态机的组件编写)
/// <summary>
/// 开线模式,从升降台取夹具,从升降台取pcb,扣合流出
/// </summary>
public class OpenLineModule : BasePlantModule
{
private enum Status
{
UnKnow,
WaitTakeFix,
TakeFix,
WaitPutFix,
PutFix,
WaitTakePcb,
TakePcb,
WaitPutPcb,
PutPcb,
/// <summary>
/// 扣合检测是否开启
/// </summary>
CheckCpk
}
/// <summary>
/// 夹具吸嘴
/// </summary>
public ICylinder FixSuction { get; set; }
/// <summary>
/// 取光板位置
/// </summary>
public Position TakeFixPoi { get; set; }
public Position PutFixPoi { get; set; }
/// <summary>
/// 允许取夹具
/// </summary>
public IInputIoDevice AllowTakeFix { set; get; }
/// <summary>
/// 取夹具完成
/// </summary>
public IOutputIoDevice TakeFixCompelte { set; get; }
/// <summary>
/// 下位机要夹具
/// </summary>
public IInputIoDevice AllowPutFix { set; get; }
public IOutputIoDevice PutEmptyPcbCompelte { set; get; }
/// <summary>
/// 扩展轨道
/// </summary>
public ExtendTrackBaffleModule ExtendTrackBaffleModule { get; set; }
private Status RobotStatus = Status.UnKnow;
protected override void argsInit()
{
if (this.FixSuction.IsOpen())
{
throw new Exception(String.Format("{0} have object", this.FixSuction.GetName()));
}
this.RobotStatus = Status.UnKnow;
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
this.FixSuction.Close();
base.argsInit();
}
protected override void handler()
{
switch (this.RobotStatus)
{
case Status.UnKnow: this.unKnow(); break;
case Status.WaitTakeFix: this.waitTakeFix(); break;
case Status.TakeFix: this.takeFix(); break;
case Status.WaitPutFix: this.waitPutFix(); break;
case Status.PutFix: this.putFix(); break;
case Status.WaitTakePcb: this.waitTakePcb(); break;
case Status.TakePcb:
this.takePcb();
this.RobotStatus = Status.WaitPutPcb; break;
case Status.WaitPutPcb: this.waitPutPcb(); break;
case Status.PutPcb: this.putPcb(); break;
case Status.CheckCpk: this.checkCpk(); break;
default: break;
}
base.handler();
}
private void unKnow()
{
this.RobotStatus = Status.WaitTakeFix;
}
private void waitTakeFix()
{
if (this.AllowTakeFix.IsOpen())
{
this.RobotStatus = Status.TakeFix;
}
}
private void takeFix()
{
this.FixSuction.Open();
this.Robot.GoToPosition(this.TakeFixPoi);
this.Sleep(100);
//到达上方一点
Position tempFixPoi= this.TakeFixPoi.Copy();
tempFixPoi.Z += 10;
this.Robot.GoToPosition(tempFixPoi);
this.GotoPoiUp(this.Robot, this.TakeFixPoi);
this.checkSuctionNozzle(this.FixSuction);
this.TakeFixCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitPutFix;
}
private void waitPutFix()
{
if (this.AllowPutFix.IsOpen())
{
this.RobotStatus = Status.PutFix;
}
}
private void putFix()
{
this.Robot.GoToPosition(this.PutFixPoi);
this.FixSuction.Close();
this.Sleep(200);
this.GotoPoiUp(this.Robot, this.PutFixPoi);
this.ExtendTrackBaffleModule.SetStatusA();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitTakePcb;
}
private void waitTakePcb()
{
if (this.AllowTakeEmptyPcb.IsOpen())
{
this.RobotStatus = Status.TakePcb;
}
}
private void waitPutPcb()
{
this.RobotStatus = Status.PutPcb;
}
private void putPcb()
{
if (this.AllowPutEmptyPcb.IsOpen())
{
this.fixEmptyPcb();
this.RobotStatus = Status.CheckCpk;
}
}
private void checkCpk()
{
//光板cpk
this.emptyPcbCpk();
//放板完成
this.PutEmptyPcbCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
//到安全点为了给翻转组件留时间
this.PutEmptyPcbCompelte.Close();
this.RobotStatus = Status.WaitTakeFix;
}
public override bool Dispose()
{
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
return base.Dispose();
}
}
}
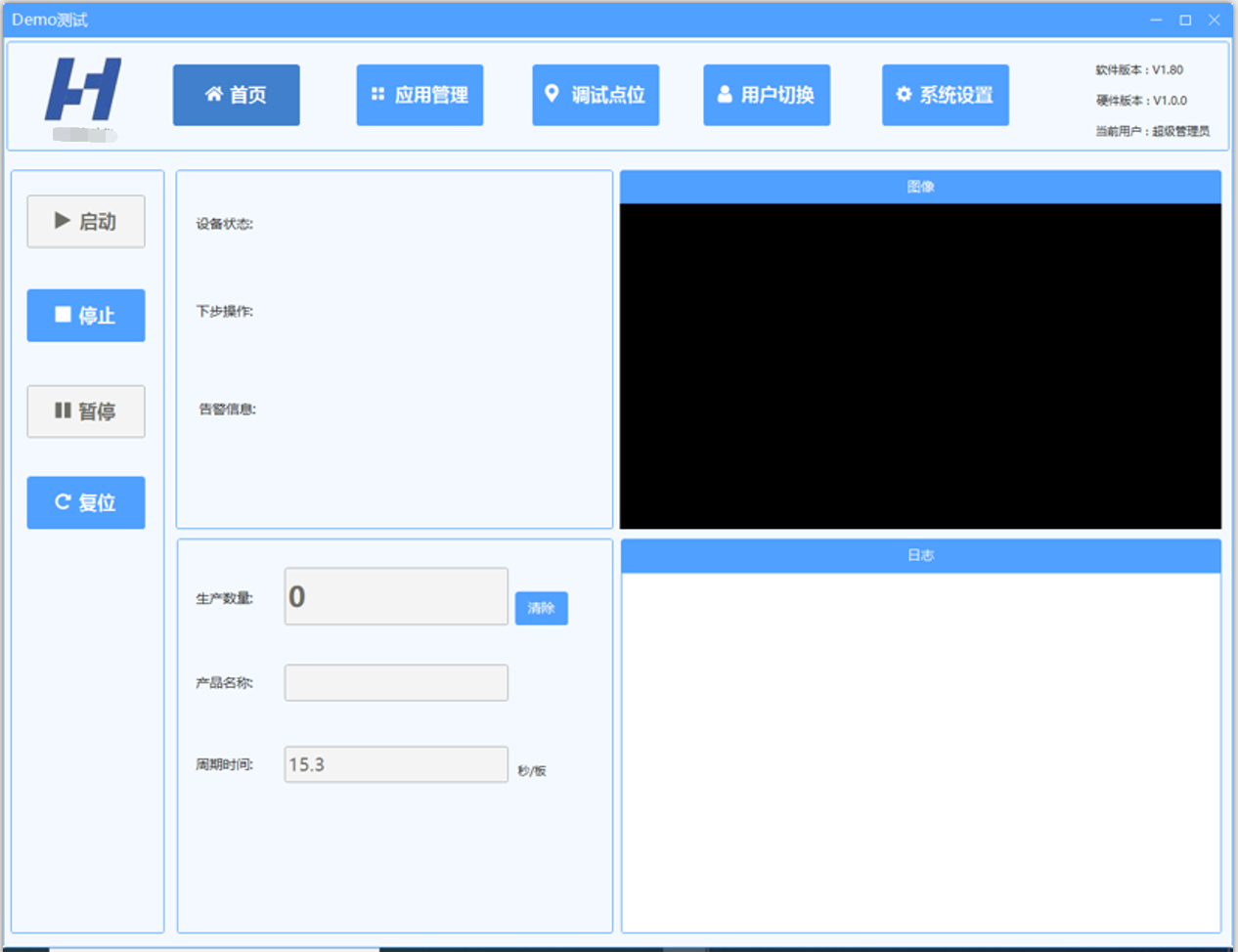
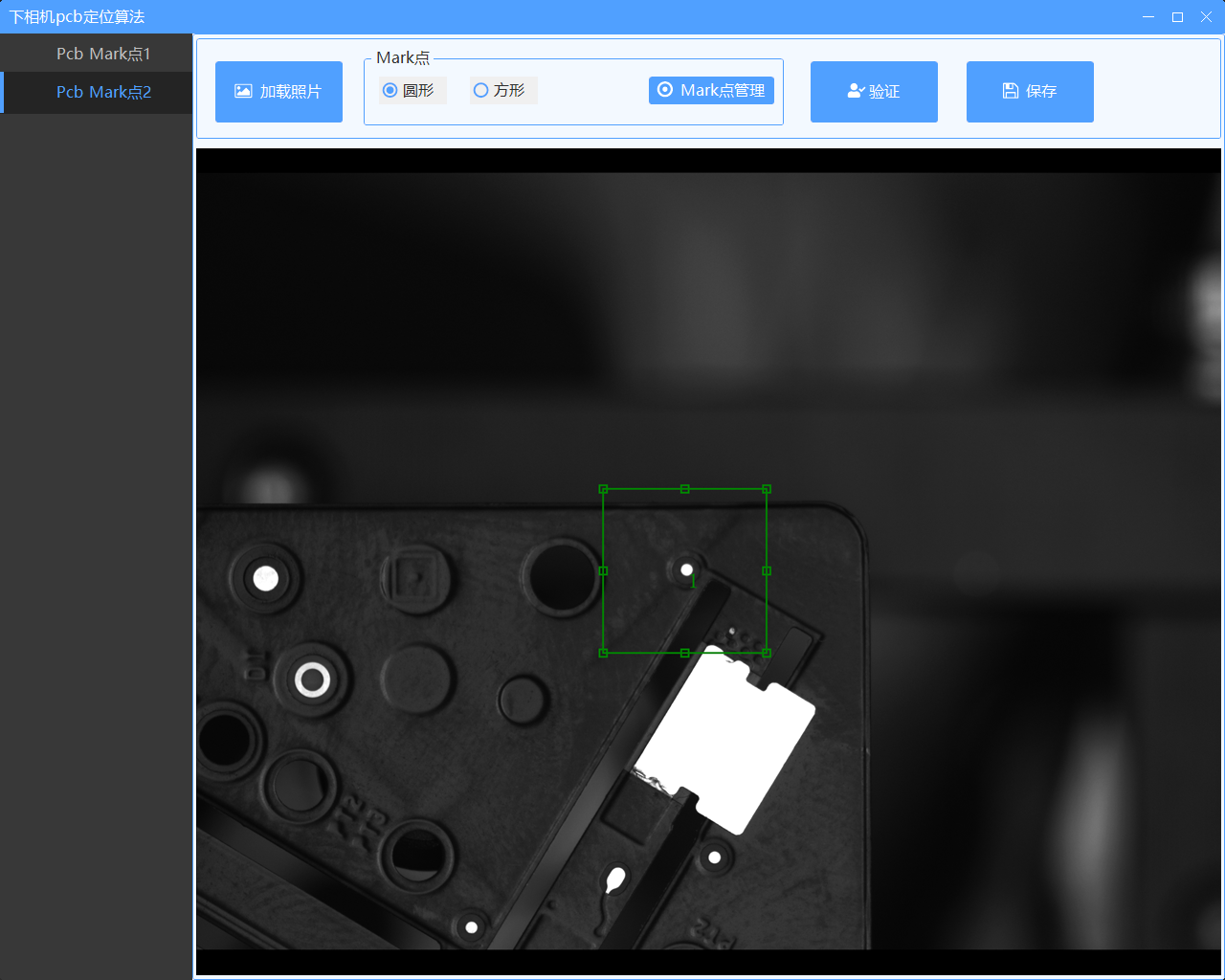
4.界面部分效果
主界面
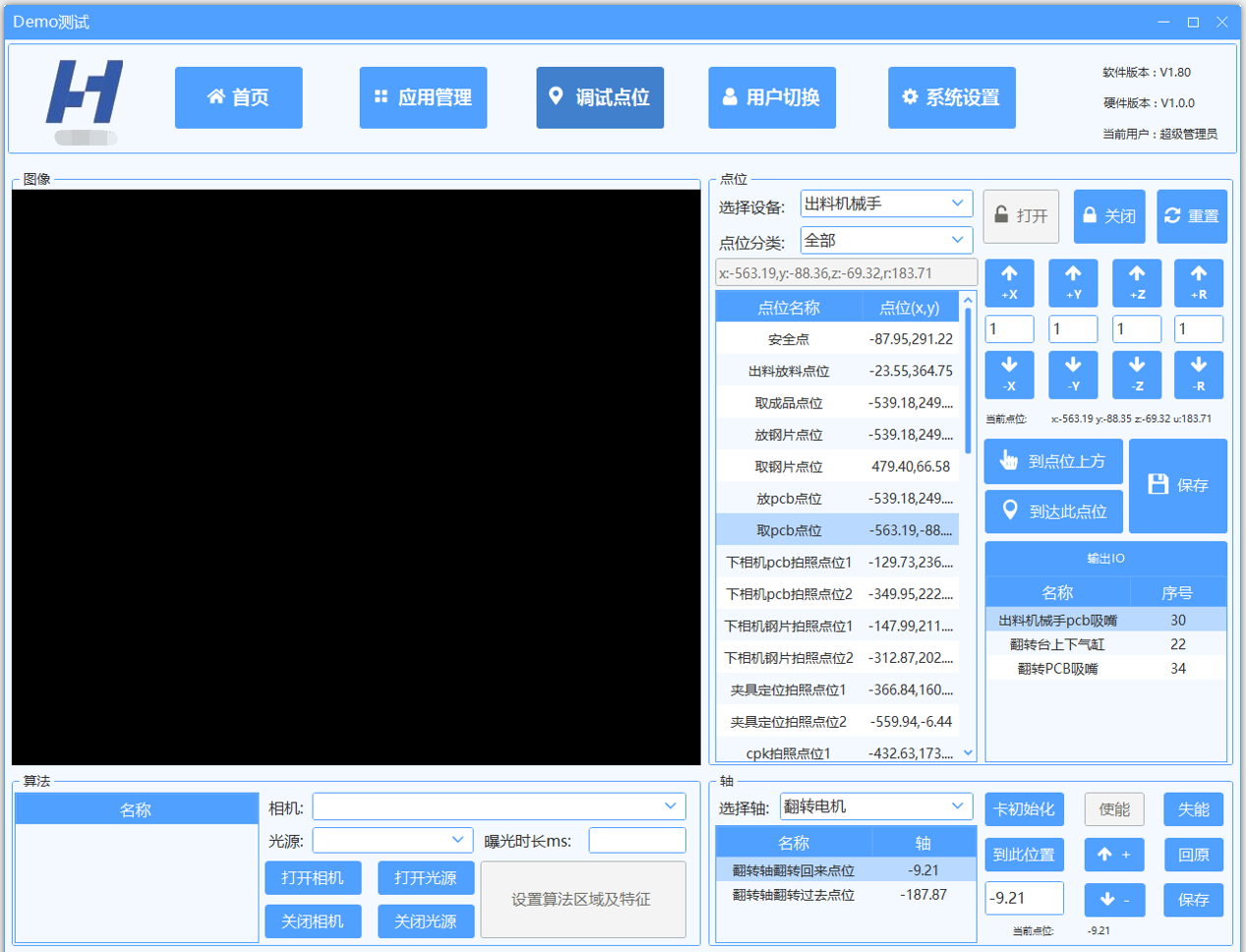
点位调试,算法,轴,io与点位联动
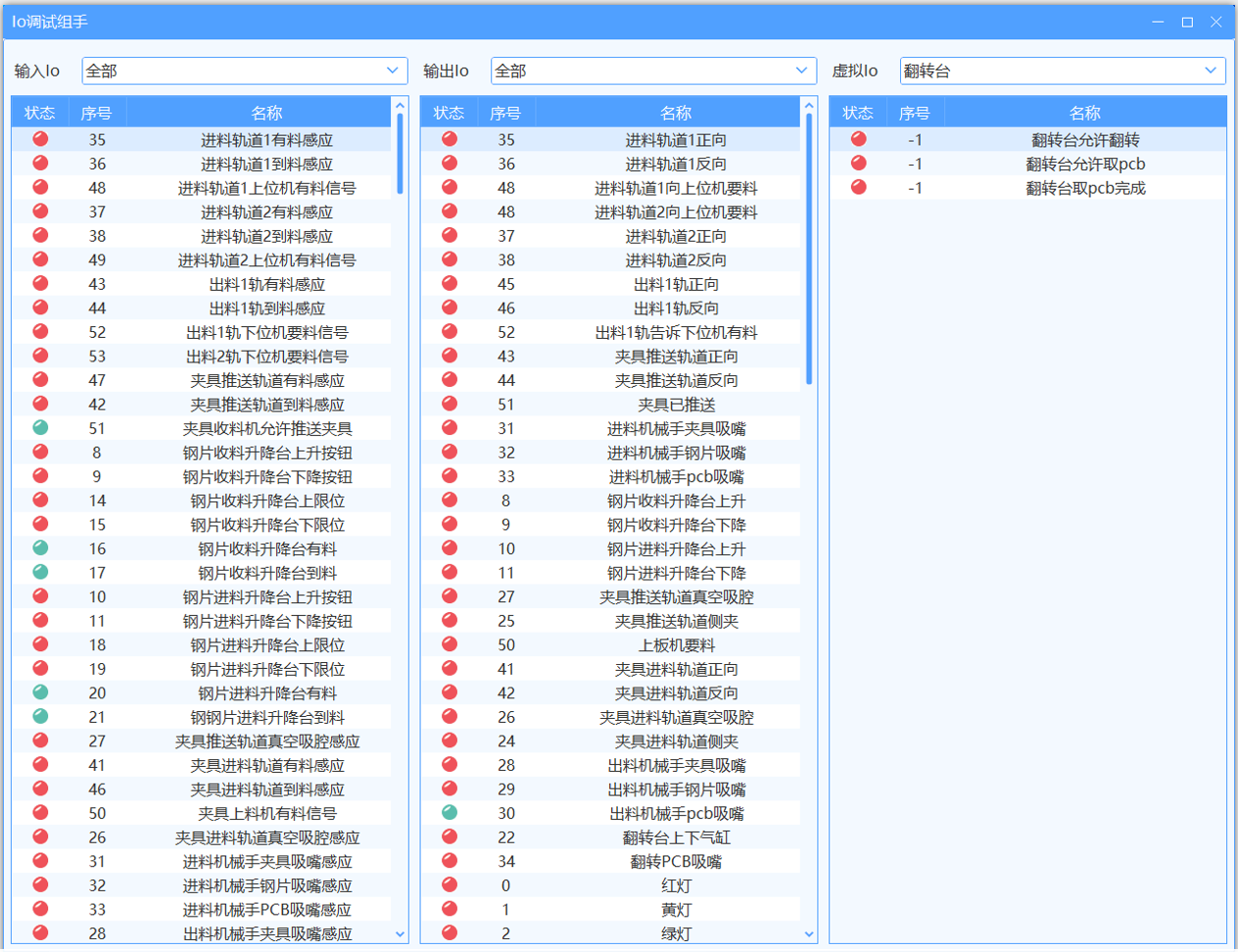
io助手
算法调试
5.后续计划
- 组件配置的编写逻辑与注入实现
- 基于状态机的组件编写
- 系统暂停继续实现逻辑
- 异常报警继续实现逻辑
- 算法交互部分实现(矩形框的拖拽,缩放,等比例获取区域等)
- 配置热更新实现
- 。。。
Rock18框架之整体框架介绍的更多相关文章
- go微服务框架go-micro深度学习(一) 整体架构介绍
产品嘴里的一个小项目,从立项到开发上线,随着时间和需求的不断激增,会越来越复杂,变成一个大项目,如果前期项目架构没设计的不好,代码会越来越臃肿,难以维护,后期的每次产品迭代上线都会牵一发而动全身.项目 ...
- Java 线程池(一):开篇及Executor整体框架介绍
一.开篇 线程池.数据库连接池,在平时的学习中总能接触到这两个词,但它们到底是什么?和线程,数据库连接有什么关系?为什么需要“池”?“池”的概念及作用是什么?要弄清楚这些问题,就要深入到“池”的实现中 ...
- Duilib源码分析(一)整体框架
Duilib界面库是一款由杭州月牙儿网络技术有限公司开发的界面开源库,以viksoe项目下的UiLib库的基础上开发(此后也将对UiLib库进行源码分析):通过XML布局界面,将用户界面和处理逻辑彻底 ...
- 基于Metronic的Bootstrap开发框架经验总结(8)--框架功能总体界面介绍
在前面介绍了一系列的<基于Metronic的Bootstrap开发框架经验总结>的随笔文章,随笔主要是介绍各个知识点的内容,对框架的总体性界面没有很好的阐述,本篇随笔主要介绍这个Boots ...
- iOS学习——iOS 整体框架及类继承框架图
整理自:IOS 整体框架类图值得收藏 一 整体框架 在iOS开发过程中,对iOS的整理框架的了解和学习是必不可少的一个环节,今天我们就好好来了解一下iOS的整体框架.首先贴一个关于iOS的框架介绍:i ...
- 关系型数据库工作原理-数据库整体框架(翻译自Coding-Geek文章)
本文翻译自Coding-Geek文章:< How does a relational database work>.原文链接:http://coding-geek.com/how-data ...
- Net分布式系统整体框架
Net分布式系统之一:系统整体框架介绍 一.设计目的 从事.Net平台开发系统已有8年多了,一直思考搭建.Net分布式系统架构.基于window平台搭建的大型分布式系统不多,之前了解过myspace. ...
- Spring Framework(框架)整体架构 变迁
Spring Framework(框架)整体架构 2018年04月24日 11:16:41 阅读数:1444 标签: Spring框架架构 更多 个人分类: Spring框架 版权声明:本文为博主 ...
- xmpp整理笔记:xmppFramework框架的导入和介绍
一个将要开发xmpp的项目,建议在项目刚创建就导入框架,这样可以避免一些自己操作失误造成不必要的损失. xmpp中最常用的框架就是 xmppFrameWork 往期回顾: xmpp整理笔记:环境的快速 ...
随机推荐
- 轻松月薪过万,NISP证书含金量有多重|NISP管理中心|网安伴|nisp
nisp一级证书含金量 NISP一级证书是面向各个行业工作人员信息安全意识普及化和网络信息安全基础培训的国家级验证.持NISP一级证书可以从信息安全保密较高的单位得到加分.证书由中国信息安全测评中心授 ...
- CF1204E Natasha, Sasha and the Prefix Sums (卡塔兰数推理)
题面 题解 把题意变换一下,从(0,0)走到(n,m),每次只能网右或往上走,所以假设最大前缀和为f(n),那么走的时候就要到达但不超过 y = x-f(n) 这条线, 我们可以枚举答案,然后乘上方案 ...
- TCP/UDP报文格式
TCP报文格式 源端口:数据发送方的端口号 目的端口:数据接收方的端口号 序号:本数据报文中的第一个字节的序号(在数据流中每个字节都对应一个序号) 确认号:希望收到的下一个数据报文中的第一个字节的序号 ...
- Homework4
书籍链接:https://www.ituring.com.cn/article/13466(why Software Development Methodologies Suck?) 问:读 why ...
- OOM故障处理流程
一.OOM机制概述 Linux 内核有个机制叫OOM killer(Out Of Memory killer),该机制会监控那些占用内存过大,尤其是瞬间占用内存很快的进程,为防止内存耗尽而自动把该进程 ...
- 利用c++编写bp神经网络实现手写数字识别详解
利用c++编写bp神经网络实现手写数字识别 写在前面 从大一入学开始,本菜菜就一直想学习一下神经网络算法,但由于时间和资源所限,一直未展开比较透彻的学习.大二下人工智能课的修习,给了我一个学习的契机. ...
- 人脸识别、活体检测(眨眼、摇头、张嘴动作)clmtrackr
人脸识别.活体检测(眨眼.摇头.张嘴动作)项目总结 项目需求 / 步骤实现描述: 1.申请摄像头权限,开始识别面部信息.同时开始录像 : 2.随机顺序生成面部检验动作: 3.并开始倒计时,需10s内完 ...
- Kafka开启SASL认证 【windowe详细版】
一.JAAS配置 Zookeeper配置JAAS zookeeper环境下新增一个配置文件,如zk_server_jass.conf,内容如下: Server { org.apache.kafka.c ...
- ceph安装Dashboard并开启Object Gateway管理功能
安装配置dashboard Ceph-Dashboard 是用 Python 开发的一个 Ceph 的监控面板,用来监控 Ceph 的运行状态.同时 提供 REST API 来访问状态数据. 低版本的 ...
- My life of Honker Security Commando
红客突击队 && 红客突击分队 红客突击队,于2019年,由队长k龙联合国内多位顶尖高校研究生牵头成立.其团队从成立至今多次参加国际网络安全竞赛并取得良好成绩,积累了丰富的竞赛经验.团 ...