目标检测复习之YOLO系列
目标检测之YOLO系列
YOLOV1:
- blogs1: YOLOv1算法理解
- blogs2: <机器爱学习>YOLO v1深入理解
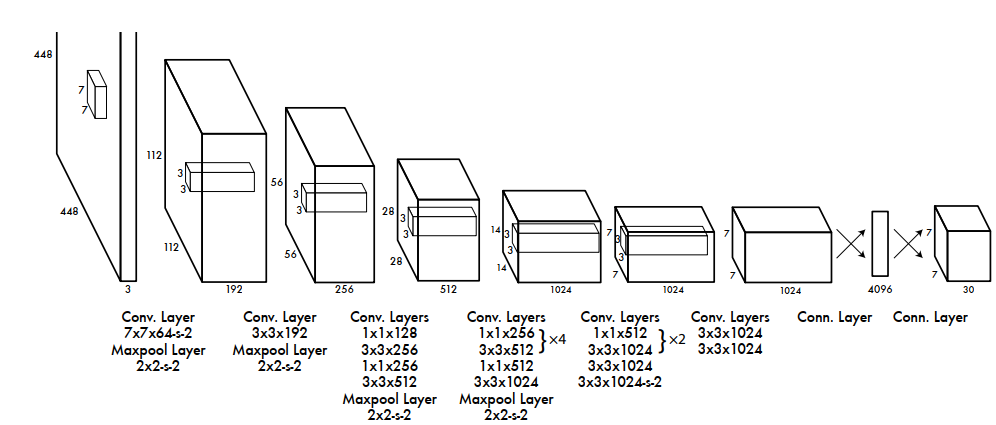
- 网络结构
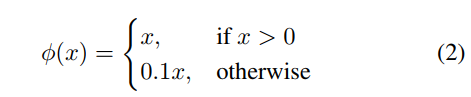
- 激活函数(leaky rectified linear activation)
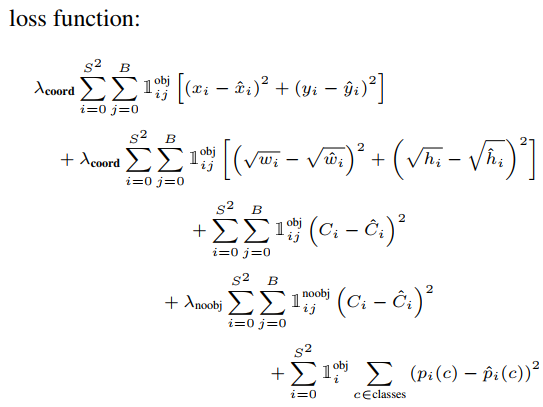
- 损失函数
YOLOV2:
- paper: YOLO9000: Better, Faster, Stronger
- blogs1: 目标检测|YOLOv2原理与实现
YOLOV2总结:
- Better
- Batch Normalization
BN可以提升模型收敛速度,而且可以起到一定正则化效果,降低模型的过拟合
YOLOv2使用BN,不使用dropout
- High Resolution Classifier
将分辨率由224*224(ImageNet分类尺寸)增加至448*448
- Convolutional With Anchor Boxes
使用先验框提高召回率
- Dimension Clusters
使用聚类算法生成先验框
- Faster
- 使用Darknet-19主干网络
YOLOV3:
- paper: YOLOv3: An Incremental Improvement
- code1: [U版yolov3
- code2: mmdetection实现的代码
- blogs1: YOLO v3网络结构分析
- blogs2: 睿智的目标检测26——Pytorch搭建yolo3目标检测平台
YOLOV3总结:
- 数据处理部分
- Backbones部分
DarkNet53, 网络结构如下:

- Neck部分
FPN
- Head部分
见网络结构图
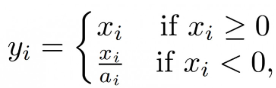
- 激活函数
LeakyReLU
- 损失函数
目标类别损失/目标置信度损失 --> 二值交叉熵损失(Binary Cross Entyopy)
目标定位损失 --> Sum of Squared Error Loss(只有正样本才有目标定位损失)
L(loc) = sum(sigmod(tx-gx)**2 + sigmod(ty-gy)**2 + (tw-gw)**2 + (th-gh)**2)
- 其他
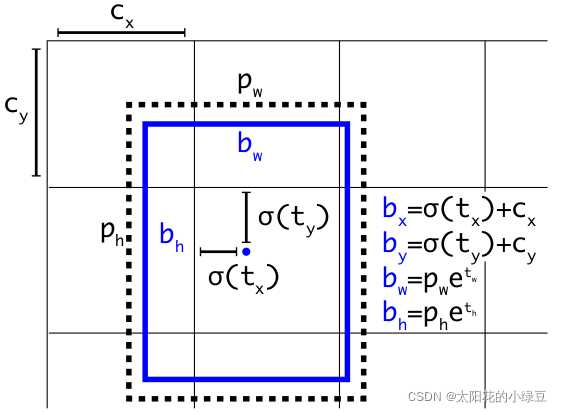
在yolov3中,关于预测的目标中心点坐标计算公式是:
见图:
YOLOV4:
- paper: YOLOv4: Optimal Speed and Accuracy of Object Detection
- code1: WongKinYiu/PyTorch_YOLOv4 与u版yolov3/5格式相同
- code2: bubbliiiing/yolov4-pytorch 代码比较好理解
- blogs1: b站up主霹雳吧啦Wz yolov4讲解博客
- blogs2: Bubbliiiing的博客
- video1: b站up主霹雳吧啦Wz yolov4讲解视频
YOLOV4总结:
- 数据处理部分
1. Mosaic data augmentation
2. CutMix data augmentation
- Backbones部分
CSPDarknet53
- Neck部分
SPP
PAN
- Head部分
和YOLOv3的head部分一样
- 正负样本分配部分
1. 在yolov3中一个GT都只分配一个Anchor, 在ylov4中(以及u版的yolov3-spp)中一个gt可以同时分配给多个anchor
2. 在Bubbliiiing版本的代码中可以描述如下:(3个head分别对应anchor为[0,1, 2, 3, 4, 5, 6, 7, 8])
a: anchor有9个,gt有10个 每个anchor和gt进行左上角对齐并且计算iou从大到小排序(shape:[10,9])
b: 例如第一个gt算出来的最大iou的anchor的index=4,但是该层的anchor索引是6,7,8,所以该gt不属于该head
c: 如果计算出该gt与anchor对应的index=6: 将该gt缩放到该head的大小,该gt的中心点落在网格中的点. 该网格中的
点包含的信息有(x,y,w,h,conf,cls). 然后和预测出来的进行对比和计算(在该版本中计算方式同yolov3)
d: 使用sigmod激活函数的取值范围是[0, 1],要想取值0,1那么预测值需要取得无穷(在后续的yolov5中有改进)
- 损失函数部分
分类损失:
定位损失: CIOU,ciou的计算方式如下:

- 激活函数
Mish激活函数
- 其他
Class label smoothing(标签平滑策略)
学习率余弦退火衰减
YOLOV5:
- paper: 无
- code: U版yolov5
- blog1: b站up主霹雳吧啦Wz yolov5讲解博客比较详细
- video1: b站up主霹雳吧啦Wz yolov5讲解视频
YOLOv5总结:
- 数据处理部分
yolov5提供的数据增强技术有:
1. Mosaic
2. Copy paste (需要segments数据)
3. Random affine 仿射变换 作者只使用了Scale和Translation(缩放和平移)
4. MixUp
- Backbones部分
Backbone: new CSP-Darknet53(使用了FCOS模块后面使用6*6大小的卷积替换)
- Neck部分
spp, pan
- head:
yolov3 head
- 损失函数
Classes loss,分类损失,采用的是BCE loss,注意只计算正样本的分类损失
Objectness loss,obj损失,采用的依然是BCE loss
Location loss,定位损失,采用的是CIoU loss
- 其他
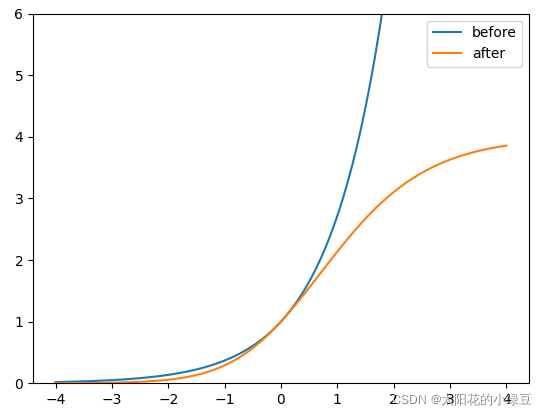
消除网格在断点等取不到值的情况
bx = (2*sigmod(tx) - 0.5) + cx
by = (2*sigmod(ty) - 0.5) + cy
那么就将原来的取值范围有[0, 1]变化到[-0.5, 1.5],也为后面使用相邻的网格预测点作为正样本奠定基础
同时:
bw = pw * (28sigmod(tw))**2
bh = ph * (28sigmod(th))**2
防止梯度爆炸,将范围调整到(0,4)也为后面的正负样本分配奠定基础
- 匹配正样本
YOLOX:
除了YOLOX,yolov1属于anchor-free目标检测方法外,其他的yolo系列都属于anchor-base方法
- paper: yolox的arxiv-paper
- code1: yolox的官方代码
- code2: mmdetection实现的代码
- blog1: 深入浅出Yolo系列之Yolox核心基础完整讲解
YOLOX总结
- 数据增强部分
Mosaic
Mixup
- Backbone
CSPDarknet53
- Neck部分
spp + pan
- Head部分
使用decoupled head(将分类头和回归头分开)
- 正样本标签分配 - simota
- 目标检测中的正样本分配
目标检测复习之YOLO系列的更多相关文章
- 目标检测复习之Anchor Free系列
目标检测之Anchor Free系列 CenterNet(Object as point) 见之前的过的博客 CenterNet笔记 YOLOX 见之前目标检测复习之YOLO系列总结 YOLOX笔记 ...
- 深度学习与CV教程(12) | 目标检测 (两阶段,R-CNN系列)
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/37 本文地址:http://www.showmeai.tech/article-det ...
- 目标检测复习之Faster RCNN系列
目标检测之faster rcnn系列 paper blogs1: 一文读懂Faster RCNN Faster RCNN理论合集 code: mmdetection Faster rcnn总结: 网络 ...
- (六)目标检测算法之YOLO
系列文章链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html (二)目标检测算法之R-CNN https://www.cnbl ...
- 目标检测复习之Loss Functions 总结
Loss Functions 总结 损失函数分类: 回归损失函数(Regression loss), 分类损失函数(Classification loss) Regression loss funct ...
- 深度学习与CV教程(13) | 目标检测 (SSD,YOLO系列)
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/37 本文地址:http://www.showmeai.tech/article-det ...
- 第三十五节,目标检测之YOLO算法详解
Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only look once: Unified, real-time object de ...
- (七)目标检测算法之SSD
系列博客链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html (二)目标检测算法之R-CNN https://www.cnbl ...
- VOC数据集 目标检测
最近在做与目标检测模型相关的工作,很多都要求VOC格式的数据集. PASCAL VOC挑战赛 (The PASCAL Visual Object Classes )是一个世界级的计算机视觉挑战赛, P ...
随机推荐
- 使用 jfinal + beetl + bootstrap 实现商城展示及管理系统
使用 jfinal+beetl 在线商品展示系统 使用 git clone https://github.com/zhouchong741/jfinal-demo.git 使用 IntelliJ ID ...
- 前端react+redux+koa写的博客推荐
React-Node搭建的博客 曾经用的php+mysql+js写的博客,现在看来已经很low了,所以用目前最火的react+koa框架重构一下.先上地址吧:目前线上版本http://www.liuw ...
- 我试试这个昵称好使不队项目NABCD指路
我试试这个昵称好使不队项目NABCD指路:https://www.cnblogs.com/team-development/p/14617203.html
- 【Android开发】【数据库】Realm For Android
目录 1.Realm简介 2.环境配置 3.初始化Realm 4.创建实体 5.增 6.删 7.改 8.查 9.异步操作 10.数据库数据更新监听 11.json转对象,插入数据库 12.Demo地址 ...
- 【Android Studio】Gradle统一管理版本号引用配置
1.在根目录下的build.gradle文件下添加 ext{ .... } 中的内容 ...... // Define versions in a single place ext { // SDK ...
- PyQt5 基础知识(六):展示控件
目录 3. 展示控件 3.1 QLabel 3.1.1 描述 3.1.2 功能作用 3.1.2.1 基本功能 3.1.2.2 文本交互 3.1.2.3 内容操作 3.1.2.3.1 文本字符串 3.1 ...
- SpringMVC获取请求参数-POJO类型参数
1.Controller中的业务方法的POJO参数的属性名与请求参数一致,参数值会自动映射匹配 1.创建POJO类 public class User { private String usernam ...
- mybatis plus @TableId注解 type属性的含义
首先该注解用在主键id上,它的type属性有8种类型 AUTO(0),NONE(1),INPUT(2),ASSIGN_ID(3),ASSIGN_UUID(4),ID_WORKER(3),ID_WORK ...
- 如何让HTTPS站点评级达到A+? 还得看这篇HTTPS安全优化配置最佳实践指南
0x00 前言简述 SSL/TLS 简单说明 描述: 当下越来越多的网站管理员为企业站点或自己的站点进行了SSL/TLS配置, SSL/TLS 是一种简单易懂的技术,它很容易部署及运行,但要对其进行安 ...
- vue3项目后台管理系统模板
Vue3.0 发布第一个版本至今有一段时间了,到现在一直在更新优化,在性能方面,对比 Vue2.x ,性能的提升比较明显,打包后体积更小 来看下 Vue3.x 新增了哪些功能和特性. Performa ...