使用 Sinamics S120 驱动脚本配置扩展报文
为了传输故障代码、电流、温度等信息。通常需要使用扩展报文的方式来发送这些信息。在驱动数量较少的情况下,可以进行手动配置。
如果驱动数量很多,可以使用脚本script的方式来配置扩展报文。
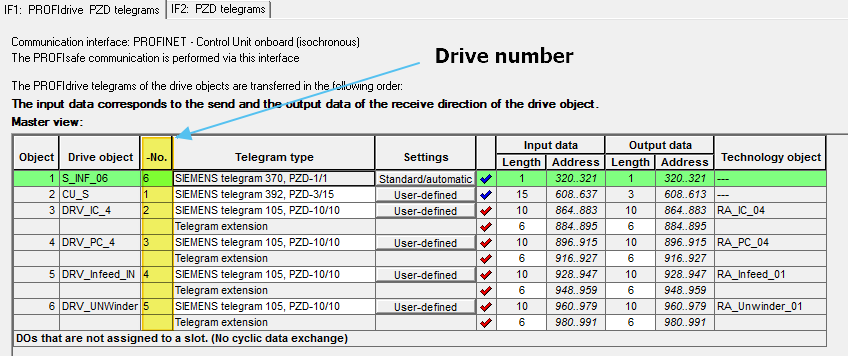
驱动编号
注意下图中的Drive Number,表示驱动在 CU(control unit)中的编号, 脚本中需要使用这个编号
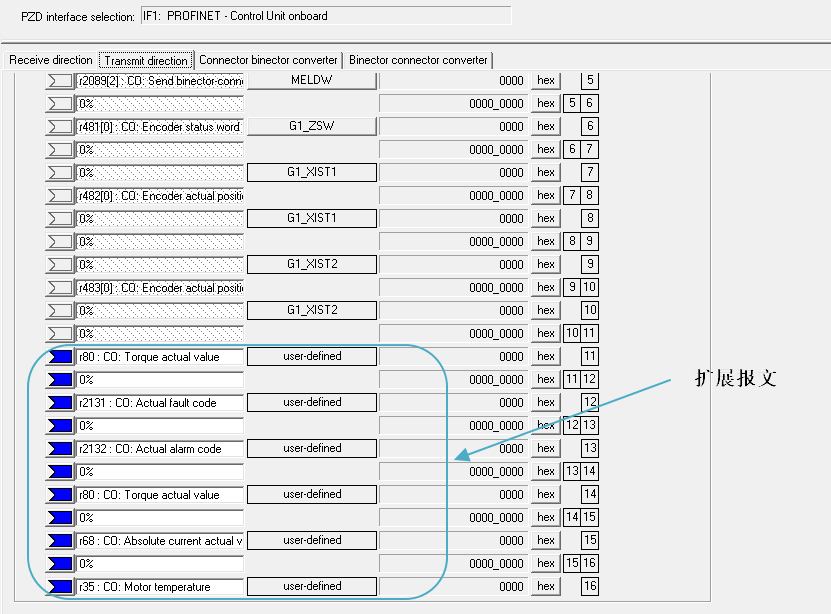
以下脚本,给报文增加如下内容
receive word 10, r80 电机扭矩
receive word 11, r2131 驱动故障代码
receive word 12, r2132 电机扭矩
receive word 13, r80 电机扭矩
receive word 14, r68 电机电流
receive word 15, r35 电机温度
使用以下脚本时,需要
- 将设备名称替换为你项目中的CU名称
- 将驱动名称替换为你项目中的驱动
- 检查Drive Number是否正确
' Script_1
'r80 torque actual value
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,10) = "80 : 0 : 2" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,10) = "80 : 0 : 3" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,10) = "80 : 0 : 4" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,10) = "80 : 0 : 5" ' receive word 10
'r2131 fault number
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,11) = "2131 : 0 : 2" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,11) = "2131 : 0 : 3" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,11) = "2131 : 0 : 4" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,11) = "2131 : 0 : 5" ' receive word 11
'r2132 alarm number
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,12) = "2132 : 0 : 2" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,12) = "2132 : 0 : 3" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,12) = "2132 : 0 : 4" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,12) = "2132 : 0 : 5" ' receive word 12
'r80 torque actual value
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,13) = "80 : 0 : 2" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,13) = "80 : 0 : 3" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,13) = "80 : 0 : 4" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,13) = "80 : 0 : 5" ' receive word 13
'r68 current
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,14) = "68 : 0 : 2" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,14) = "68 : 0 : 3" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,14) = "68 : 0 : 4" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,14) = "68 : 0 : 5" ' receive word 14
'r35 motor temperature
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,15) = "35 : 0 : 2" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,15) = "35 : 0 : 3" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,15) = "35 : 0 : 4" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,15) = "35 : 0 : 5" ' receive word 15
使用 Sinamics S120 驱动脚本配置扩展报文的更多相关文章
- SINAMICS S120的核心控制单元CU320使用教程,电机模块接线
SINAMICS是西门子公司新一代的驱动产品,它正在逐步取代现有的MASTERDRIVES及SIMODRIVE系列的驱动系统.SINAMICS S120是集V/f控制.矢量控制和伺服控制于一体的多轴驱 ...
- 通过DP总线实现S7-300/400与SINAMICS S120 通讯
一.DP总线通讯功能概述 S7-300/400与SINAMICS S120 之间通过DP总线可进行周期性及非周期性数据通讯. 使用标准S7功能块SFC14/SFC15,S7-300/400PLC通过P ...
- 迅为iTOP-4418/6818开发板-驱动-实现GPIO扩展
实现 GPIO 扩展,先弄清楚“复用”的概念,将调用这些 GPIO 的驱动去掉配置,重新编译,加到自己的驱动中,就可以实现扩展的 GPIO 的输入和输出.另外必须要先看文档“迅为iTOP-4418开发 ...
- php中的脚本加速扩展opcache
今儿在azure里装php5.5.4,发现原先php5.4.php5.3中的zend guard laoder以及php5.2中的Zend Optimizer均不能再用,一直很喜欢用的eacceler ...
- Linux、UNIX设置开机自动运行命令、脚本配置
一般我们不建议人工部署开机自动启动的脚本.而是建议通过crontab 部署脚本监控,理由如下: 1.自动开机部署脚本不好定位问题,有可能导致主机重启过慢. 2.自动开机部署脚本不好定位问题,有可能导致 ...
- 五十八.Kibana使用 、 Logstash配置扩展插件
1.导入数据 批量导入数据并查看 1.1 导入数据 1) 使用POST方式批量导入数据,数据格式为json,url 编码使用data-binary导入含有index配置的json文件 ]# ...
- 1-1. OSS/ALSA 声卡的驱动与配置和 Madplay 嵌入式播放器的移植
报警子系统 一. OSS/ALSA 声卡的驱动与配置 声卡驱动中传统的OSS构架在02年被收购后即不开源,并且OSS的混音效果不好->因此ALSA构架孕育而生. ALSA(高级音频构架,目前应用 ...
- 基于VMware的eCos环境编译redboot(脚本配置redboot)
基于VMware的ecos,redboot及hello world(1)安装请参照[[ecos学习2]wmware运行redboot[方法二]--图形实现配置 ] (2)修改内存布局文件:~/i386 ...
- Linux本地网络脚本配置(内网与外网)
脚本位于: /etc/sysconfig/network-scripts/ifcfg-eth0 DEVICE=eth0 //网卡的名字 BOOTPROTO=static // none静态IP ...
随机推荐
- php+windows环境安装
1.下载并安装phpstorm 2.查找激活码激活phpstorm 3.由于php官方没有提供exe版本,安装phpstudy,获得windows下exe编译版本的php 4.安装VisualSVN ...
- Python爬虫-播报天气信息(生成exe文件)待续
#!/usr/bin/env python3 # -*- coding : utf-8 -*- '''1.从https://my.oschina.net/joanfen/blog/140364获取要播 ...
- String.Compare 方法 (String, Int32, String, Int32, Int32)
String.Compare 方法 (String, Int32, String, Int32, Int32) 对两个指定的 String 对象的子字符串进行比较,并返回一个指示二者在排序顺序中的相对 ...
- AJAX控件——多层弹出Accordion
<asp:Accordion ID="Accordion1" runat="server" ContentCssClass="content&q ...
- 特殊引用类型(string)
private string FuncWithParameters(int param1, String param2, List<string> param3) { // 我们在这里改变 ...
- Java - 多线程中的不变性问题
这篇记录一下保证并发安全性的策略之——不变性. (注意:是Immutable,不是Invariant!) 将一连串行为组织为一个原子操作以保证不变性条件,或者使用同步机制保证可见性,以防止读到失效数据 ...
- 使用eclipse创建maven web项目
1.新建项目: 2.选择模板: 3.输入项目信息: 4.新建的项目结构,发现index.jsp报错,直接删除重新创建一个index.jsp文件后,发现仍然报错,再在pom/xml文件中添加相应的ser ...
- ASID 与 MIPS 中 TLB 相关
ASID 为了提高TLB的性能,将TLB分成Global和process-specific.global 是指常驻在tlb中不会被刷出的,例如内核空间的翻译,process-specific 是指每个 ...
- js控制input text字符键入/字符长度限制/字母自动大写
功能: 1.仅允许指定字符键入 2.限制长度 实现代码: <input type="text" style="width: 6em" name=" ...
- 三 Buffer
使用Buffer一般遵循以下四个步骤 写入数据到Buffer 调用flip() 从Buffer中读取数据 调用clear()或者compact()方法 当向buffer写入数据时,buffer会记录下 ...