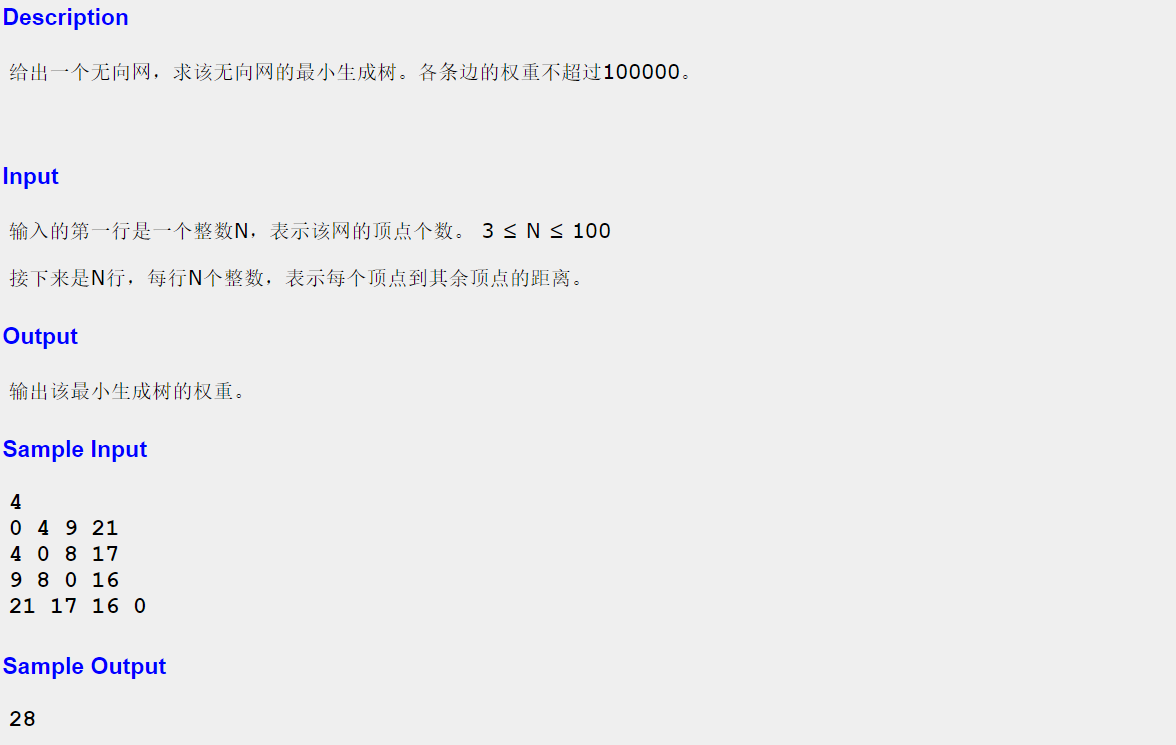
Prime算法 与 Kruskal算法求最小生成树模板
算法原理参考链接 ==> UESTC算法讲堂——最小生成树
关于两种算法的复杂度分析 ==> http://blog.csdn.net/haskei/article/details/53132681
故稀疏图用 Kruskal、稠密图用 Prime、空间足够情况下都用 Prime + Heap 优化
下面的模板都是解决这一道题的模板
Prime模板
邻接矩阵版
#include<bits/stdc++.h>
using namespace std;
const int INF = 0x3f3f3f3f;
;
int G[maxn][maxn], Dis[maxn], N;
bool vis[maxn];
int Prime(int st)
{
;
; i<=N; i++)
vis[i] = false,
Dis[i] = G[st][i];
vis[st] = true;
; i<N; i++){
int v, Min = INF;
; j<=N; j++){
if(!vis[j] && Dis[j]<Min){
Min = Dis[j];
v = j;
}
}
Cost += Dis[v];
vis[v] = ;
; j<=N; j++){
if(!vis[j] && Dis[j] > G[v][j]){
Dis[j] = G[v][j];
}
}
}
return Cost;
}
int main(void)
{
while(~scanf("%d", &N)){
; i<=N; i++)
; j<=N; j++)
scanf("%d", &G[i][j]);
printf());
}
;
}
邻接表 + 堆优化
#include<bits/stdc++.h>
using namespace std;
;
struct EDGE{ int v, nxt, w; };
struct NODE{ int v, cost;
NODE(int vv, int cc):v(vv), cost(cc){};
bool operator < (const NODE &rhs)const{
return this->cost > rhs.cost;
};
};
EDGE Edge[maxn*maxn];
bool vis[maxn];
int Head[maxn];
int N, cnt;
inline void init()
{
; i<=N; i++)
Head[i]=-,vis[i]=false;
cnt = ;
}
inline void AddEdge(int from, int to, int weight)
{
Edge[cnt].v = to;
Edge[cnt].w = weight;
Edge[cnt].nxt = Head[from];
Head[from] = cnt++;
}
int Prime(int st)
{
;
NODE tp(st, );
priority_queue<NODE> que;
que.push(tp);
;
while(!que.empty() && EdgeCnt<cnt){
tp = que.top(); que.pop();
if(vis[tp.v]) continue;
else vis[tp.v] = true;
Cost += tp.cost;
EdgeCnt++;
; j=Edge[j].nxt){
if(!vis[Edge[j].v])
que.push(NODE(Edge[j].v, Edge[j].w));
}
}
return Cost;
}
int main(void)
{
while(~scanf("%d", &N)){
init();
int Val;
; i<=N; i++){
; j<=N; j++){
scanf("%d", &Val);
if(Val){
AddEdge(i, j, Val);
}
}
}
printf());
}
;
}
邻接表 + 配对堆优化
#include<bits/stdc++.h>
#include<ext/pb_ds/priority_queue.hpp>
using namespace __gnu_pbds;
using namespace std;
;
struct EDGE{ int v, nxt, w; };
typedef pair<int, int> pii;
EDGE Edge[maxn*maxn];
bool vis[maxn];
int Head[maxn];
int N, cnt;
inline void init()
{
; i<=N; i++)
Head[i]=-,vis[i]=false;
cnt = ;
}
inline void AddEdge(int from, int to, int weight)
{
Edge[cnt].v = to;
Edge[cnt].w = weight;
Edge[cnt].nxt = Head[from];
Head[from] = cnt++;
}
int Prime(int st)
{
;
__gnu_pbds::priority_queue< pii, greater<pii>, pairing_heap_tag > que;
que.push(make_pair(, st));
;
while(!que.empty() && EdgeCnt<cnt){
pii tp = que.top(); que.pop();
int v = tp.second;
if(vis[v]) continue;
else vis[v] = true;
Cost += tp.first;
EdgeCnt++;
; j=Edge[j].nxt){
if(!vis[Edge[j].v])
que.push(make_pair(Edge[j].w, Edge[j].v));
}
}
return Cost;
}
int main(void)
{
while(~scanf("%d", &N)){
init();
int Val;
; i<=N; i++){
; j<=N; j++){
scanf("%d", &Val);
if(Val){
AddEdge(i, j, Val);
}
}
}
printf());
}
;
}
Kruskal模板
#include<bits/stdc++.h>
using namespace std;
;//最大点数
int c[maxn], N;//并查集使用
int cnt;
struct EDGE{
int from, to, w;
bool operator < (const EDGE &rhs) const{
return this->w < rhs.w;
};
}Edge[maxn*maxn];//储存边的信息,包括起点/终点/权值
inline void init()
{
; i<=N; i++)
c[i] = i;
cnt = ;
}
inline void AddEdge(int from, int to, int weight)
{
Edge[cnt].from = from;
Edge[cnt].to = to;
Edge[cnt].w = weight;
cnt++;
}
int Findset(int x)
{
int root = x;
while(c[root] != root)
root = c[root];
int idx;
while(c[x] != root){ /// 路径压缩
idx = c[x];
c[x] = root;
x = idx;
}
return root;
}
int Kruskal()//传入点数,返回最小生成树的权值,如果不连通返回-1
{
sort(Edge,Edge+cnt);
;//计算加入的边数
;
;i<cnt;i++){
int R1 = Findset(Edge[i].from);
int R2 = Findset(Edge[i].to);
if(R1 != R2){
Cost += Edge[i].w;
c[R1]=R2;
EdgeCnt++;
}
) break;
}
) ;//不连通
else return Cost;
}
int main()
{
while(~scanf("%d", &N)){
init();
int Val;
; i<=N; i++){
; j<=N; j++){
scanf("%d", &Val);
if(Val){
AddEdge(i, j, Val);
}
}
}
printf("%d\n", Kruskal());
}
;
}
Prime算法 与 Kruskal算法求最小生成树模板的更多相关文章
- 最小生成树--Prim算法,基于优先队列的Prim算法,Kruskal算法,Boruvka算法,“等价类”UnionFind
最小支撑树树--Prim算法,基于优先队列的Prim算法,Kruskal算法,Boruvka算法,“等价类”UnionFind 最小支撑树树 前几节中介绍的算法都是针对无权图的,本节将介绍带权图的最小 ...
- 最小生成树,Prim算法与Kruskal算法,408方向,思路与实现分析
最小生成树,Prim算法与Kruskal算法,408方向,思路与实现分析 最小生成树,老生常谈了,生活中也总会有各种各样的问题,在这里,我来带你一起分析一下这个算法的思路与实现的方式吧~~ 在考研中呢 ...
- C++编程练习(10)----“图的最小生成树“(Prim算法、Kruskal算法)
1.Prim 算法 以某顶点为起点,逐步找各顶点上最小权值的边来构建最小生成树. 2.Kruskal 算法 直接寻找最小权值的边来构建最小生成树. 比较: Kruskal 算法主要是针对边来展开,边数 ...
- 最小生成树(Minimum Spanning Tree)——Prim算法与Kruskal算法+并查集
最小生成树——Minimum Spanning Tree,是图论中比较重要的模型,通常用于解决实际生活中的路径代价最小一类的问题.我们首先用通俗的语言解释它的定义: 对于有n个节点的有权无向连通图,寻 ...
- 最小生成树---普里姆算法(Prim算法)和克鲁斯卡尔算法(Kruskal算法)
普里姆算法(Prim算法) #include<bits/stdc++.h> using namespace std; #define MAXVEX 100 #define INF 6553 ...
- Prim算法、Kruskal算法、Dijkstra算法
无向加权图 1.生成树(minimum spanning trees) 图的生成树是它一棵含有所有顶点的无环联通子图 最小生成树:生成树中权值和最小的(所有边的权值之和) Prim算法.Kruskal ...
- 最小生成树两个经典算法(Prime算法、Kruskal算法) - biaobiao88
经典的最小生成树例子,Prime算法,具体的步骤及其注释本人均在代码中附加,请仔细阅读与品味,要求,可以熟练的打出. //Prime算法基础 #include<iostream> usin ...
- 最小生成树-Prim算法与Kruskal算法
一.最小生成树(MST) ①.生成树的代价:设G=(V,E)是一个无向连通网,生成树上各边的权值之和称为该生成树的代价. ②.最小生成树:在图G所有生成树中,代价最小的生成树称为最小生成树. 最小生成 ...
- (学习1)最小生成树-Prim算法与Kruskal算法
最小生成树: 求一个有 n 个结点的连通图的生成树是原图的极小连通子图,且包含原图中的所有 n 个结点,并且有保持图连通的最少的边. 1:Prim算法(适合稠密图) 伪代码: Prim(G){ //G ...
- 最小生成树的Prim算法以及Kruskal算法的证明
Prime算法的思路:从任何一个顶点开始,将这个顶点作为最小生成树的子树,通过逐步为该子树添加边直到所有的顶点都在树中为止.其中添加边的策略是每次选择外界到该子树的最短的边添加到树中(前提是无回路). ...
随机推荐
- linux 互斥量
互斥量(mutex)从本质上来说是一把锁,在访问共享资源前对互斥量进行加锁,在访问完后释放互斥量上的锁. 对互斥量进行加锁以后,任何其他试图再次对互斥量加锁的线程都将会被阻塞直到当前线程释放该互斥锁. ...
- list、tuple、dict加*星号
*相当于解压的作用,当list中只有一个元素时,利用*作用相当于直接去[],去[]后的数据类型是字符串. _list = [1,2,3] _tuple = (1,2,3) _dict = {1:'a' ...
- C#扩展方法 DataTable.ToEntitys
类A需要添加功能,我们想到的就是在类A中添加公共方法,这个显而易见肯定可以,但是由于某种原因,你不能修改类A本身的代码,但是确实又需要增加功能到类A中去,怎么办? 这个时候扩展方法(Extension ...
- c++静态成员变量初始化时不受访问权限控制
1.要在类外初始化,const 成员变量才能在类内初始化 2.初始化在类外,而不在main函数内 class A{ private: string name; A(){ name = "a& ...
- unity 2d 版的lookAt
void LookAt2D(Transform target) { Vector3 dir = target.position - transform.position; float angle = ...
- Common Linux Commands 日常工作常用Linux命令
How to know CPU info cat /proc/cpuinfo arch How to know memory info: cat /proc/meminfo ...
- Mac014--Sourcetree安装(Git client)
Sourcetree:git client Tool Step1:download address: https://www.sourcetreeapp.com/ Step2:要求username/u ...
- JavaScript FSO属性大全
什么是FSO? FSO 即 File System Object 文件系统对象,是一种列表 Windows 磁盘目录和文件,对目录和文件进行删除.新建.复制.剪切.移动等操作的技术.使用 FSO 网站 ...
- VSL基础
VSL是Virtools提供的一个非常有创意的脚本语言,它以输写代码的方式(区别于Virtools现有的图形化编程界面)进行编程开发,提高了程序的可读性和工作效率. 下图的功能是:将一个3D物体拷贝出 ...
- python之cmd模块
md模块可以用来做交互式shell cmd模块是python中包含的一个公共模块,用于交互式shell和其他命令解释器等的基类,我们可以基于cmd模块自定义我们的子类,实现我们自己的交互式shell ...