ROS 下使用3D激光雷达 velodyne vlp-16
Velodyne VLP16型激光雷达横向视角360°,纵向视角30°
系统和ROS版本:Ubuntu 14.04 ,ros indigo
1. 安装驱动
sudo apt-get install ros-indigo-velodyne
2. 虚拟机VM->Setting
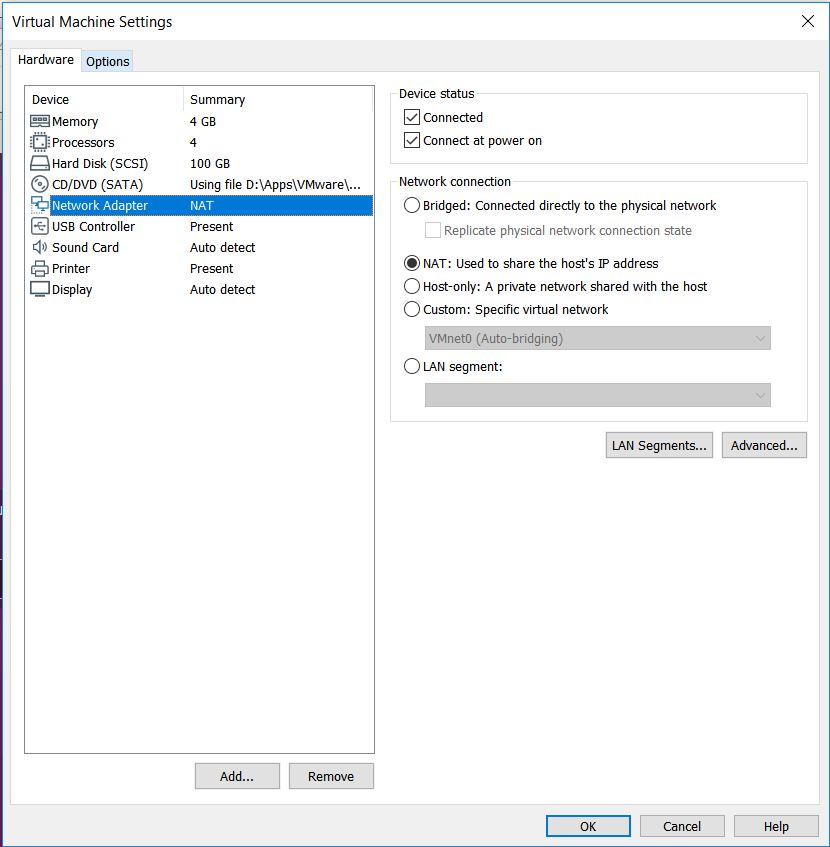
Network connection设置成为Bridged,然后将自己的IP设置成为接受激光数据的IP(主机和虚拟机此时必须在同一网段)
sudo ifconfig erh0 192.168.1.28 255.255.255.0
如果激光已经插入网口,此时打开虚拟机浏览器输入192.168.1.201可以看到激光雷达的配置文件。
3. 新建一个ROS的工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
catkin_make
source devel/setup.bash
4. 把Velodyne XML文件转成ROS节点的YAML文件(转换后生成VLP-16.yaml) (没有校准文件可以省略),或者去https://github.com/XinWenfei/useful下载(实际操作,转换不成功,所以我没用校准文件)
rosrun velodyne_pointcloud gen_calibration.py ~/filepath/VLP-16.xml
5. 加载
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=/filepath/VLP-16.yaml
6. 实时显示点云图
rosrun rviz rviz -f velodyne //无法显示
#-f: set fixed frame
建议还是
rosrun rviz rviz
#之后在手动设置Fixed Frame= velodyne
然后在rviz中点Add by topic,增加PointCloud2,这样就可以实时显示获取的3D点云图
7. 记录数据
rosbag record -O saved_filename /velodyne_points
ROS 下使用3D激光雷达 velodyne vlp-16的更多相关文章
- ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS下使用传感器和执行器
ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS使用传感器和执行器 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第四 ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- ORB-SLAM2(2) ROS下配置和编译
1配置USB相机 1.1网友参考: http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E ...
- Windows 7硬盘安装CentOS 6.4 双系统 (WIN7下硬盘安装Linux(Fedora 16,CentOS 6.2,Ubuntu 12.04))
WIN7下硬盘安装Linux(Fedora 16,CentOS 6.2,Ubuntu 12.04) 最近在看<鸟哥私房菜:基础学习篇>,觉得很不错,想要用U盘装个windows 7 和 ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ROS下使用ASUS Xtion Pro Live
一.ROS官网hydro版本OpenNI安装 3. Installation 3.1 Ubuntu installation To install only openni_camera: sudo a ...
随机推荐
- C++之指针使用
C++指针使用的好坏直接反映了编程人员水平的高低,下面从指针和数组的区别.指针参数是如何传递内存.野指针.malloc/free.new/delete和内存耗尽怎么办方面进行总结. 一 指针和数组对比 ...
- 设置正确的DNS
上网或下载软件慢问题,除去少数设备陈旧.感染病毒.网卡硬件故障和网卡驱动错误方面的因素,绝大部分原因是由于部分上网电脑或家用无线路由器设置了错误的DNS造成的,正确的方法是应该在电脑或路由器上使用本地 ...
- OpenSSH 使用技巧
1. 取消 OpenSSH 初次连接 yes 确认 在脚本中有时会使用ssh进行远程连接操作,如果是第一次 ssh 连接往往会提示你是否确认连接并要求你输入yes, 才能继续.如何才能避免这个步骤呢? ...
- Ubantu中sublime汉化
1 启动并进入sublime主界面: 2 如图所示,点击菜单栏中“preferences”,弹出选项中找到“package control”: 3 进入下一步,选择“install package”: ...
- STM32GPIO管脚设置
(1)GPIO_Mode_AIN 模拟输入 (2)GPIO_Mode_IN_FLOATING 浮空输入(3)GPIO_Mode_IPD 下拉输入 (4)GPIO_Mode_IPU 上拉输入 (5)GP ...
- photoshop画矩形款
1.屏幕截图 2.在photoshop新建图形 3.用矩形选框 4.右键打开描边,宽度设成5个像素
- android jUnit test 进行自动化测试
一. 被test的工程: 新建一个android工程:D_session:它有一个activity:D_sessionActivity:package名:com.mysession 二.测试工程: 新 ...
- 第14篇 PSR-3规范(日志)
1. Specification 1.1 Basics The LoggerInterface exposes eight methods to write logs to the eight RFC ...
- 有关Botton的用法(一)
<Button android:layout_width="wrap_content" android:layout_height="wrap_content&qu ...
- PTA 说反话-加强版(20 分)(字符串处理)
说反话-加强版(20 分) 给定一句英语,要求你编写程序,将句中所有单词的顺序颠倒输出. 输入格式: 测试输入包含一个测试用例,在一行内给出总长度不超过500 000的字符串.字符串由若干单词和若干空 ...