基于335X的Linux网口驱动分析
基于335X的linux网口驱动分析
一、 系统构成
1、 硬件平台 AM335X
2、 LINUX内核版本 4.4.12
二、 网口驱动构架(mdio部分)
mdio网口驱动部分 使用 总线、设备、驱动模型,总结如下:
若设备和驱动匹配,则执行
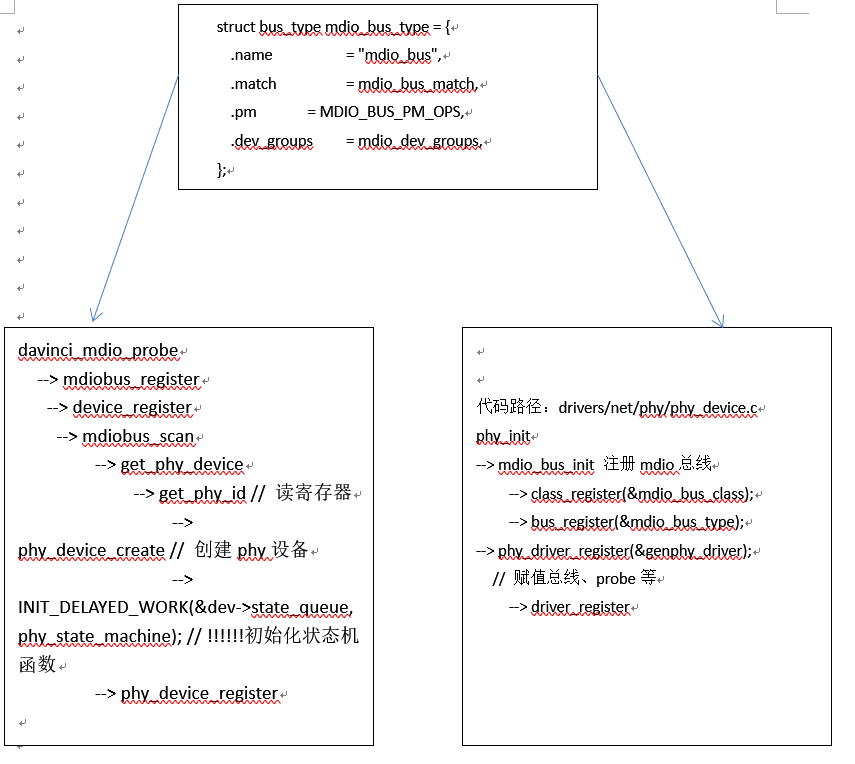
davinci_mdio_probe
--> mdiobus_register
--> device_register
--> mdiobus_scan
--> get_phy_device
--> get_phy_id // 读寄存器
--> phy_device_create // 创建phy设备
--> INIT_DELAYED_WORK(&dev->state_queue, phy_state_machine); // !!!!!!初始化状态机函数
--> phy_device_register
经过以上步骤,由davinci_mdio_driver又创建出一个mdio_bus_type类型的bus.并扫描并创建了连接在bus上的phydev.
若设备和驱动匹配,这时,也进行了phydev和phy_driver的匹配和绑定。则执行phy_probe
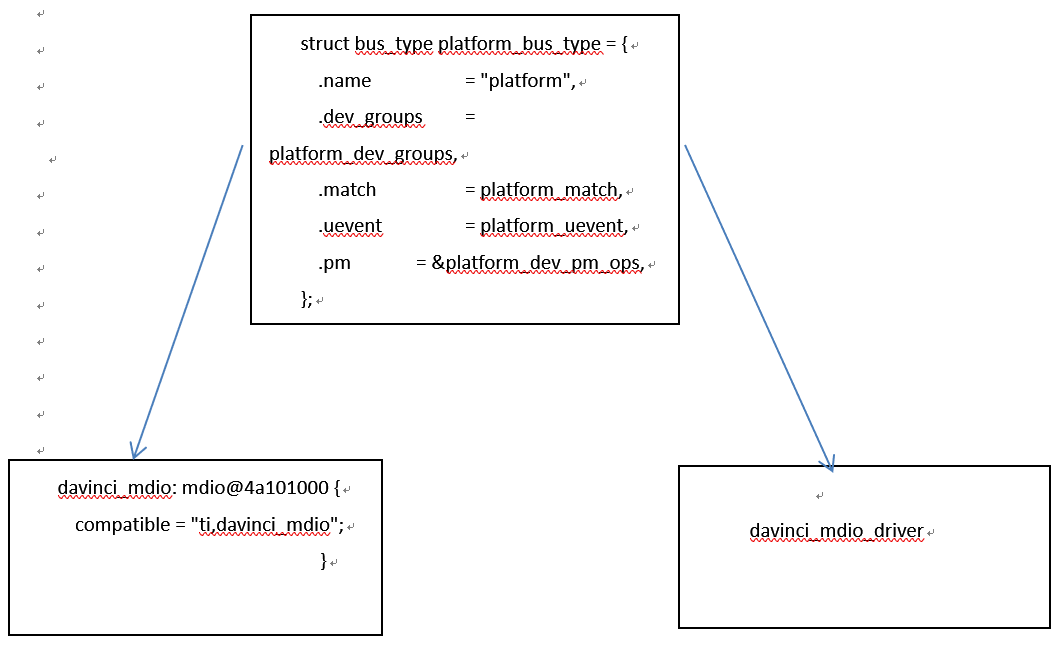
以上总线下的设备和驱动的匹配过程如下,以platform_bus为例,其它总线也是这个流程
platform_device跟platform_driver的匹配
drivers/base/platform.c
a. 注册 platform_driver 的过程:
platform_driver_register
__platform_driver_register
drv->driver.probe = platform_drv_probe;
driver_register
bus_add_driver
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers); // 把 platform_driver 放入 platform_bus_type 的driver链表中
driver_attach
bus_for_each_dev(drv->bus, NULL, drv, __driver_attach); // 对于plarform_bus_type下的每一个设备, 调用__driver_attach
__driver_attach
ret = driver_match_device(drv, dev); // 判断dev和drv是否匹配成功
return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用 platform_bus_type.match
driver_probe_device(drv, dev);
really_probe
drv->probe // platform_drv_probe
platform_drv_probe
struct platform_driver *drv = to_platform_driver(_dev->driver);
drv->probe
b. 注册 platform_device 的过程:
platform_device_register
platform_device_add
device_add
bus_add_device
klist_add_tail(&dev->p->knode_bus, &bus->p->klist_devices); // 把 platform_device 放入 platform_bus_type的device链表中
bus_probe_device(dev);
device_initial_probe
__device_attach
ret = bus_for_each_drv(dev->bus, NULL, &data, __device_attach_driver); // // 对于plarform_bus_type下的每一个driver, 调用 __device_attach_driver
__device_attach_driver
ret = driver_match_device(drv, dev);
return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用platform_bus_type.match
driver_probe_device
匹配函数是platform_bus_type.match, 即platform_match,
匹配过程按优先顺序罗列如下:
a. 比较 platform_dev.driver_override 和 platform_driver.drv->name
b. 比较 platform_dev.dev.of_node的compatible属性 和 platform_driver.drv->of_match_table
c. 比较 platform_dev.name 和 platform_driver.id_table
d. 比较 platform_dev.name 和 platform_driver.drv->name
有一个成功, 即匹配成功
CPSW也是一个内部设备,也遵循总线、设备、驱动模型。CPSW设备从设备树中获得,DRV则是系统注册,匹配后进行probe,其主要执行过程如下:
cpsw_probe
--> CPSW平台数据、资源、DMA初始化、赋值netdev_ops、ethtool_ops
--> 注册网络设备:register_netdev
--> cpsw_ndo_open (此处根据实际经验得到,目前还没有从源代码级别解答出调用过程)
--> cpsw_slave_open
--> phy_connect (传递cpsw_adjust_link)
--> bus_find_device_by_name (从mdio总线上查找device)
--> to_phy_device (从device结构体中找到phy_device)
--> phy_connect_direct (传递handler,初始化 ***)
--> phy_attach_direct ()
--> d->driver = &genphy_driver[GENPHY_DRV_1G].driver;(通用驱动赋值,3.17支持1G和10G)
--> d->driver->probe (这里就调用到Generic PHY的检测函数phy_probe)
--> device_bind_driver (绑定驱动到设备)
--> phydev->attached_dev = dev; (有函数使用到attached_dev指针)
--> phydev->state = PHY_READY; (将PHY状态标记为PHY_READY)
--> phy_init_hw (硬件级的初始化,最后会调用genphy_config_init)
--> phy_prepare_link (赋值cpsw_adjust_link为adjust_link)
--> phy_start_machine (启动PHY状态机 ***)
--> phy_start_interrupts (经测了,但好像没调用到这里)
--> phy_start(PHY_READY变成PHY_UP)
--> 其它的CPSW的初始化
基于335X的Linux网口驱动分析的更多相关文章
- 基于335X的UBOOT网口驱动分析
基于335X的UBOOT网口驱动分析 一.软硬件平台资料 1. 开发板:创龙AM3359核心板,网口采用RMII形式 2. UBOOT版本:U-Boot-2016.05,采用FDT和DM. 参考链 ...
- 基于335X平台Linux交换芯片驱动开发
基于335X平台Linux交换芯片驱动开发 一.软硬件平台资料 1.开发板:创龙AM3359核心板,网口采用RMII形式. 2.Kernel版本:4.4.12,采用FDT 3.交换芯片MARVEL ...
- linux串口驱动分析
linux串口驱动分析 硬件资源及描写叙述 s3c2440A 通用异步接收器和发送器(UART)提供了三个独立的异步串行 I/O(SIO)port,每一个port都能够在中断模式或 DMA 模式下操作 ...
- 基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl 0. 导语 在嵌入式的道路上寻寻觅觅很久,进入嵌入式这个行业也有几年的时间了,从2011年后 ...
- 基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(二)之cdev与read、write
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(二)之cdev与read.write 0. 导语 在上一篇博客里面,基于OMAPL138的字符驱动_GPIO驱动AD9833(一)之 ...
- Linux spi驱动分析(二)----SPI核心(bus、device_driver和device)
一.spi总线注册 这里所说的SPI核心,就是指/drivers/spi/目录下spi.c文件中提供给其他文件的函数,首先看下spi核心的初始化函数spi_init(void).程序如下: 点击(此处 ...
- Linux I2C驱动分析(三)----i2c_dev驱动和应用层分析 【转】
本文转载自:http://blog.chinaunix.net/uid-21558711-id-3959287.html 分类: LINUX 原文地址:Linux I2C驱动分析(三)----i2c_ ...
- linux驱动基础系列--Linux I2c驱动分析
前言 主要是想对Linux I2c驱动框架有一个整体的把控,因此会忽略协议上的某些细节,同时里面涉及到的一些驱动基础,比如平台驱动.设备模型.sysfs等也不进行详细说明原理,涉及到i2c协议部分也只 ...
- Linux gadget驱动分析1------驱动加载过程
为了解决一个问题,简单看了一遍linux gadget驱动的加载流程.做一下记录. 使用的内核为linux 2.6.35 硬件为芯唐NUC950. gadget是在UDC驱动上面的一层,如果要编写ga ...
随机推荐
- openresty开发系列35--openresty执行流程之5内容content阶段
openresty开发系列35--openresty执行流程之5内容content阶段 content 阶段 ---init阶段---重写赋值---重写rewrite---access content ...
- 软件定义网络基础---REST API概述
一:什么是REST API REST API是北向接口的主流设计方式 API是应用程序编程接口,是预先定义好的函数,可以供应用程序或开发人员访问调用 年 Roy Thomas Fielding 的博士 ...
- 【Linux】walle 部署上线单报错:mv: cannot overwrite directory ‘/www’ with non-directory
错误截图 问题分析:项目设置中. 目标集群部署路径错误, 举例: 假设你 项目名称:laofan 在目标服务器的路径: /www/wwwdata/laofan 那么你在标集群部署路径 就可以写: /w ...
- 【翻译】Flink Table Api & SQL —Streaming 概念 —— 时态表
本文翻译自官网: Temporal Tables https://ci.apache.org/projects/flink/flink-docs-release-1.9/dev/table/strea ...
- [LeetCode] 309. Best Time to Buy and Sell Stock with Cooldown 买卖股票的最佳时间有冷却期
Say you have an array for which the ith element is the price of a given stock on day i. Design an al ...
- [LeetCode] 349. Intersection of Two Arrays 两个数组相交
Given two arrays, write a function to compute their intersection. Example 1: Input: nums1 = [1,2,2,1 ...
- MySQL之表日志管理
MySQL日志管理 mysql日志(默认存放在datadir): 同大多数关系型数据库一样,日志文件是MySQL数据库的重要组成部分.MySQL有几种不同的日志文件,通常包括错误日志文件,二进制日志, ...
- ADB 常用命令及详解
1.pull文件 adb pull (文件路径) (想要pull的路径) MacBook-Pro:~ caris$ adb pull /sdcard/Android/data/com.xiwi.log ...
- python文件夹操作
1.遍历文件夹下所有文件2.将后缀为.DCM的文件复制到指定文件夹 import os import shutil def all_path(dirname): result = []#所有的文件 f ...
- Java大厂笔试&&面试集合大全目录
面试技巧 掌握面试技巧,提升自身软实力! HR面试都会问什么问题?(上) HR面试都会问什么问题?(下) 作为一技术人员,面试前都需要做哪些准备? 面试题 Java各个阶段面试题,帮你提升自我,拿到高 ...