POJ 2632 Crashing Robots (坑爹的模拟题)
| Time Limit: 1000MS | Memory Limit: 65536K | |
| Total Submissions: 6599 | Accepted: 2854 |
Description
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
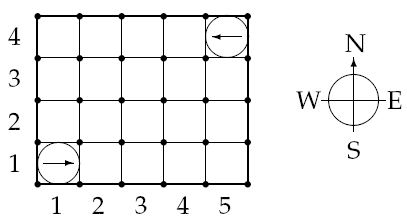
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
Source
#include<cstdio>
#include<iostream>
#include<cstring>
#define N 0
#define S 1
#define W 2
#define E 3
using namespace std; int x[110],y[110];
char d[110];
char d1[]={'N','W','S','E'};
char d2[]={'N','E','S','W'};
int dy[4]={1,-1,0,0};
int dx[4]={0,0,-1,1};
int flag,a,b;
int maps[110][110]; void fuc(int &x,int &y,char &dir,char ii,int nu)
{
int i,k,tmp,dt=0;
if(ii=='L')
{
for(i=0;i<4;i++)
{
if(dir==d1[i])
{
tmp=i;
break;
}
}
dir=d1[(tmp+nu)%4];
}
else if(ii=='R')
{
for(i=0;i<4;i++)
{
if(dir==d2[i])
tmp=i;
}
dir=d2[(tmp+nu)%4];
}
else if(ii=='F')
{
if(dir=='E')
dt=E;
else if(dir=='W')
dt=W;
else if(dir=='N')
dt=N;
else
dt=S;
//printf("dt=%d\n",dt);
for(i=0;i<nu;i++)
{
maps[x][y]=0;
x+=dx[dt];
y+=dy[dt];
//printf("test: %d %d\n",x,y);
if(maps[x][y]!=0)
{
flag=2;
break;
}
else if(x<1||x>a||y<1||y>b)
{
flag=1;
break;
}
maps[x][y]=1;
}
}
} int main()
{
//freopen("input.txt","r",stdin);
//freopen("output.txt","w",stdout);
int n,m,t,ins,num,ans,u,leaf,tt;
scanf("%d",&tt);
getchar();
while(tt--)
{
flag=0,leaf=0;
memset(maps,0,sizeof(maps));
scanf("%d%d",&a,&b);
getchar();
scanf("%d%d",&n,&m);
getchar();
for(int i=1;i<=n;i++)
{
scanf("%d %d %c",&x[i],&y[i],&d[i]);
maps[x[i]][y[i]]=1;
getchar();
}
for(int j=1;j<=m;j++)
{
scanf("%d %c %d",&t,&ins,&num);
//printf("ins=%c\n",ins);
if(leaf==0)
{
fuc(x[t],y[t],d[t],ins,num);
if(flag==1)
{
printf("Robot %d crashes into the wall\n",t);
leaf=1;
} else if(flag==2)
{
for(u=1;u<=n;u++)
{
if(x[u]==x[t]&&y[u]==y[t]&&u!=t)
ans=u;
}
printf("Robot %d crashes into robot %d\n",t,ans);
leaf=1;
}
}
getchar();
}
if(leaf==0) printf("OK\n");
}
return 0;
}
|
11934156 |
Accepted |
192K |
0MS |
2785B |
2013-08-06 23:12:46 |
附带另外的测试数据:
input:
32
1 1
1 1
1 1 W
1 F 1
3 3
1 9
2 2 W
1 F 1
1 L 1
1 F 1
1 L 1
1 F 2
1 L 5
1 F 2
1 R 3
1 F 2
5 5
9 1
3 1 W
3 2 N
3 4 S
3 5 E
1 3 S
2 3 N
4 3 E
5 4 W
3 3 W
9 F 4
5 5
9 1
3 1 W
3 2 N
3 4 S
3 5 E
1 3 S
2 3 N
4 3 E
5 4 W
3 3 S
9 F 4
5 5
9 1
3 1 W
3 2 N
3 4 S
3 5 E
1 3 S
2 3 N
4 3 E
5 4 W
3 3 N
9 F 4
5 5
9 1
3 1 W
3 2 N
3 4 S
3 5 E
1 3 S
2 3 N
4 3 E
5 4 W
3 3 E
9 F 4
5 5
2 3
3 3 E
4 5 N
2 L 3
2 R 8
2 F 3
46 46
9 100
39 25 E
15 14 N
15 22 N
27 25 S
25 40 S
19 36 W
27 6 W
22 45 W
28 15 W
5 F 13
3 R 2
8 F 9
5 L 4
6 F 7
3 F 12
9 F 5
6 L 2
3 L 2
3 F 13
2 L 2
4 F 12
9 L 2
9 F 2
5 F 1
3 F 3
9 L 2
3 L 5
3 L 21
3 F 6
4 R 2
4 F 1
6 F 13
9 R 2
9 R 29
6 L 2
2 L 9
2 F 13
4 L 2
1 F 14
5 F 1
6 F 1
8 L 2
6 F 1
3 R 13
4 F 4
3 F 6
6 F 4
2 L 2
5 F 1
9 R 14
3 R 2
6 R 2
9 L 12
3 F 3
7 F 1
9 L 2
6 F 5
6 F 12
4 F 5
3 R 2
6 R 29
6 F 10
9 F 1
2 F 5
9 F 10
4 F 4
4 R 31
9 L 8
3 L 2
4 R 27
3 F 4
1 F 1
1 R 3
5 L 10
6 R 17
7 F 15
8 F 8
9 F 7
6 F 11
8 L 3
2 F 3
1 L 2
3 L 3
4 R 2
7 L 11
1 L 30
8 L 13
9 F 11
2 L 2
8 R 2
3 R 2
3 R 2
8 L 2
4 L 2
2 F 8
8 F 14
6 R 6
9 F 13
2 F 11
5 F 7
1 F 14
1 R 7
9 L 28
3 L 4
6 F 14
7 F 5
2 R 29
5 F 1
8 L 4
16 27
6 100
12 13 W
9 3 W
10 3 E
6 7 W
7 11 W
3 1 W
5 F 4
5 L 14
6 F 1
6 F 1
3 L 19
5 F 3
4 L 29
4 R 3
4 L 2
1 L 2
5 R 2
4 F 6
4 F 4
6 L 9
5 L 2
3 R 2
5 F 1
5 F 1
5 F 3
1 L 2
3 R 2
6 R 2
1 L 26
3 R 2
5 L 2
5 L 11
5 F 6
3 R 2
2 F 1
3 F 3
5 L 10
3 F 1
2 F 3
4 R 2
6 F 6
2 F 1
6 F 1
2 R 2
1 L 2
1 R 2
4 R 5
4 R 2
4 F 4
6 L 12
3 L 2
3 F 1
4 L 15
4 L 4
3 F 4
6 F 4
2 R 2
4 F 4
3 L 2
5 L 2
2 R 2
6 F 1
3 F 1
2 F 2
6 R 2
5 R 23
5 L 14
3 R 1
6 L 2
3 F 6
6 R 6
4 F 1
6 L 2
2 F 6
1 L 24
5 F 3
1 R 21
4 L 2
1 R 2
5 F 6
2 R 20
5 L 9
6 F 2
3 F 2
5 F 2
1 F 1
5 L 13
4 R 2
1 F 5
6 R 2
2 F 1
2 R 2
6 L 23
3 F 1
2 F 3
4 R 2
4 L 2
5 F 5
1 F 3
4 F 1
2 F 5
3 R 19
5 L 21
6 F 2
4 L 2
1 L 2
15 48
35 1
10 32 W
7 40 E
14 45 E
11 30 S
2 38 W
14 2 W
5 10 W
11 13 W
7 44 N
8 13 S
1 5 N
13 47 E
10 34 S
1 35 E
2 9 W
1 9 W
3 43 W
9 14 N
5 32 E
6 1 W
2 14 S
5 33 W
9 36 S
13 22 E
11 19 S
4 1 W
1 38 N
14 35 W
4 7 W
11 21 N
5 17 W
3 21 N
2 25 E
6 5 N
13 10 E
12 F 5
40 13
5 100
31 8 E
25 12 N
35 1 S
34 2 S
19 5 E
5 R 2
2 F 8
3 L 2
1 F 7
4 F 3
1 F 5
2 F 7
3 F 4
1 F 2
1 R 2
2 L 2
2 F 4
4 L 19
4 F 3
2 R 2
5 L 23
5 R 8
1 R 28
3 F 5
4 R 18
1 F 3
2 F 6
2 F 1
2 R 2
4 R 2
4 R 31
4 L 11
3 R 2
5 F 3
1 F 1
1 R 2
5 F 4
4 F 4
2 L 28
5 L 4
1 F 4
4 F 1
3 F 6
2 R 2
2 F 6
1 F 5
5 F 8
5 R 2
3 L 2
1 F 1
1 F 1
4 F 1
2 F 1
1 R 21
1 L 2
5 F 5
2 F 8
4 F 1
2 L 6
2 L 2
2 L 2
5 R 8
2 F 7
4 L 2
3 F 6
5 F 1
3 R 2
3 F 8
1 F 1
5 R 15
3 L 17
3 F 4
3 R 4
5 L 2
2 F 8
5 L 1
2 L 2
1 F 4
1 L 31
3 F 3
3 F 1
1 F 4
1 F 3
4 L 2
3 F 1
3 L 2
4 F 5
4 F 3
2 R 2
3 F 2
5 R 2
1 R 19
5 F 2
2 L 2
2 F 7
1 L 21
3 F 1
5 F 7
2 R 3
2 F 4
1 F 7
2 R 5
2 F 4
5 L 25
2 F 2
49 7
15 11
43 5 N
23 2 S
30 1 N
24 5 E
13 6 E
29 4 S
5 3 S
15 3 N
28 5 E
29 6 E
10 3 W
7 6 N
6 5 N
13 2 S
10 5 W
5 F 4
3 R 22
11 R 13
5 L 2
6 F 1
9 F 1
3 F 8
15 F 2
3 F 1
11 L 2
6 R 2
4 41
2 100
1 37 S
2 10 W
1 R 2
2 F 3
1 R 2
1 F 2
2 R 2
1 F 3
2 R 2
1 F 1
2 L 23
2 L 13
2 R 30
1 F 1
1 L 2
2 F 4
1 R 28
2 R 18
1 F 1
1 F 6
2 F 6
2 F 6
1 L 2
1 F 3
1 R 2
2 F 6
2 L 26
2 L 2
1 R 19
2 L 2
2 F 1
2 R 30
2 F 1
2 F 1
2 F 1
2 L 19
2 R 2
2 F 2
1 F 3
1 L 21
2 F 6
1 L 15
2 R 30
1 F 1
1 L 26
1 L 2
2 F 6
2 L 1
1 F 7
2 L 17
1 F 1
1 L 21
1 F 6
2 L 26
1 F 2
1 F 7
2 L 2
2 R 20
2 R 27
2 F 3
1 F 6
1 L 6
2 R 9
1 F 6
1 L 2
1 F 1
2 F 4
2 R 2
2 L 2
2 R 2
1 F 3
2 R 2
1 R 2
1 R 5
1 F 4
2 L 14
1 F 1
2 R 24
1 R 2
2 L 13
2 F 2
2 F 4
1 F 4
1 R 9
2 F 4
2 L 29
2 F 5
1 F 3
2 F 4
1 R 7
2 R 2
1 L 2
1 R 25
1 R 20
2 L 25
1 R 28
1 R 2
1 F 6
1 L 2
1 F 4
1 R 20
2 L 15
3 20
2 1
2 14 N
2 13 W
2 F 2
42 27
19 1
19 25 E
24 20 S
14 3 E
41 3 N
3 18 W
30 2 E
8 24 N
35 13 E
20 7 S
32 23 E
29 1 W
1 14 E
39 7 E
1 12 E
10 4 E
19 18 W
28 6 E
29 21 W
7 13 W
12 F 1
29 44
52 10
28 29 E
25 31 S
22 31 N
5 2 E
16 28 E
19 2 W
5 4 S
22 38 S
6 37 E
2 25 N
17 19 N
4 6 S
8 25 N
13 22 N
4 11 N
5 39 S
18 34 S
17 1 W
11 17 N
14 34 W
13 31 W
26 1 S
12 38 E
14 21 W
2 2 S
23 20 S
24 14 S
5 29 E
2 10 W
26 24 W
24 34 N
17 38 E
17 29 N
20 26 S
10 7 N
19 8 N
27 7 W
5 5 W
4 39 S
27 32 S
25 12 S
28 25 S
18 31 W
15 41 S
20 20 E
6 22 W
9 12 W
24 2 E
19 32 N
23 34 S
17 11 W
6 4 S
46 L 2
43 F 4
47 F 2
33 F 5
36 L 11
3 L 2
45 L 2
40 F 5
33 F 10
45 F 6
27 37
46 100
20 22 S
26 3 N
22 28 S
17 16 W
15 18 N
11 17 S
7 15 W
17 2 E
7 16 W
13 14 S
11 27 N
21 23 S
11 12 E
22 11 S
19 11 E
22 1 S
8 16 S
21 18 S
2 20 W
16 6 S
5 22 N
3 15 S
2 29 W
14 23 S
19 9 W
12 30 N
3 28 N
23 33 S
25 24 N
6 4 S
12 6 N
1 14 N
24 1 E
8 21 W
23 22 W
10 21 N
17 31 S
7 11 S
13 7 E
6 27 S
3 6 W
12 35 E
23 16 E
5 29 W
20 23 S
1 22 E
3 L 2
25 R 25
33 R 5
24 F 9
25 F 2
15 F 2
46 L 4
46 L 13
45 L 14
26 F 4
4 F 5
42 F 1
39 R 3
24 L 2
6 F 2
46 F 5
12 F 8
6 F 3
9 F 5
36 F 5
38 R 2
35 L 30
38 F 7
2 R 6
46 L 3
21 R 2
44 F 1
36 F 2
23 F 1
40 R 30
11 F 3
20 L 6
10 F 6
10 R 20
11 F 1
35 L 29
27 F 8
3 L 24
14 L 6
32 F 10
40 F 8
26 R 3
12 F 5
10 L 19
10 L 2
36 R 2
27 F 1
21 L 2
39 F 1
17 F 7
46 L 25
2 L 13
5 R 2
2 R 18
22 F 9
45 L 18
16 F 6
5 F 9
34 F 1
5 L 2
21 F 6
36 L 26
41 F 6
2 F 1
5 F 8
38 F 5
35 F 9
15 R 2
31 F 2
37 L 2
44 F 2
46 F 1
40 F 1
42 F 4
12 F 9
22 F 2
7 R 2
9 R 24
17 F 6
15 R 2
34 F 5
46 F 6
29 R 2
9 F 10
34 R 11
15 L 10
16 F 7
8 R 22
1 F 8
38 F 3
41 F 5
22 L 7
45 R 2
2 F 5
20 F 3
24 L 1
32 L 2
43 F 6
38 F 2
32 F 6
46 5
2 8
33 1 E
12 1 W
1 F 2
2 L 21
1 R 2
2 F 1
2 F 2
2 L 2
1 L 2
1 R 2
33 3
3 70
21 2 E
26 2 N
16 2 N
3 F 4
2 L 16
3 L 15
2 R 2
1 L 2
1 L 16
1 R 19
1 R 2
1 F 3
1 F 2
1 R 2
3 F 4
1 F 1
1 R 2
3 F 1
1 F 2
2 R 2
2 F 2
2 F 2
1 L 2
3 F 1
2 F 2
3 L 30
3 L 2
1 L 24
1 R 12
3 L 31
3 L 2
3 F 5
1 F 2
3 L 2
3 F 1
2 L 20
1 F 2
1 L 19
2 L 2
1 R 2
2 F 2
1 F 5
1 L 28
1 R 1
2 L 2
1 L 2
3 R 2
3 L 17
3 L 2
1 R 25
2 R 19
3 F 1
3 F 2
1 R 21
1 L 2
2 F 1
2 R 14
3 F 4
1 F 3
1 R 13
1 R 2
1 F 1
2 L 2
1 F 1
1 L 2
2 F 5
2 L 9
3 F 1
1 F 3
1 F 1
3 F 1
2 L 5
2 F 2
46 3
4 14
34 1 E
28 2 S
34 2 W
23 1 E
3 F 2
1 F 4
1 L 2
4 F 6
3 F 4
2 F 6
4 F 5
4 F 5
3 F 6
2 F 5
4 F 2
3 F 6
4 L 29
1 L 2
22 18
7 43
1 5 W
17 11 S
1 14 W
7 13 N
6 1 E
15 9 W
18 1 S
1 F 5
4 F 1
6 F 1
7 F 4
3 F 2
4 F 1
3 L 3
4 L 2
1 F 1
4 F 2
7 L 2
2 R 10
1 F 2
7 F 4
4 F 4
3 R 9
3 R 17
5 F 6
4 R 2
2 F 6
5 F 1
1 F 1
1 F 5
5 R 2
1 F 3
7 R 2
7 R 2
6 F 5
5 F 1
5 L 2
2 R 2
5 F 5
7 L 28
7 R 2
7 L 2
2 F 1
4 F 5
2 F 6
7 R 2
1 F 1
1 R 2
5 F 4
7 F 4
33 26
40 100
9 16 E
1 14 N
13 23 W
3 6 W
6 20 S
4 21 E
12 25 E
5 23 S
24 4 W
20 3 E
17 7 N
8 22 S
6 12 W
1 16 N
32 22 E
15 1 E
4 14 S
17 19 S
1 4 W
26 9 E
24 24 E
14 10 E
1 17 S
10 20 N
31 8 N
15 5 E
24 20 E
27 13 E
9 7 N
30 20 W
21 4 S
27 5 N
26 15 W
32 7 E
18 21 W
21 19 N
6 18 W
9 4 W
13 1 E
2 8 S
36 R 2
39 F 1
3 F 5
35 L 2
30 F 9
29 L 2
3 L 2
26 F 5
14 L 10
24 F 9
9 L 24
17 F 5
23 F 2
23 F 4
34 F 2
18 F 4
15 F 1
17 F 7
39 L 6
32 F 1
7 F 6
38 R 2
19 L 6
2 R 2
5 F 1
10 F 5
4 L 2
38 F 3
2 F 8
37 R 2
6 L 13
5 F 2
13 F 5
1 F 9
33 F 6
20 F 3
12 F 1
21 L 27
22 F 9
21 F 3
32 L 16
28 F 1
29 L 7
15 F 1
12 F 8
23 F 8
33 F 5
9 F 4
14 R 11
38 F 7
16 L 2
18 R 4
27 F 7
40 R 8
23 F 1
11 L 31
39 F 6
24 F 4
23 F 1
12 F 7
19 F 6
14 F 5
7 L 2
27 R 2
11 F 9
27 L 4
38 F 7
4 L 8
29 F 2
29 L 31
33 F 4
33 F 9
7 F 7
11 F 6
14 F 1
25 F 9
6 R 5
8 R 2
32 R 2
34 R 2
19 L 20
27 L 5
16 R 28
18 F 9
20 F 3
21 L 2
39 F 4
31 F 3
16 F 2
19 R 2
31 F 4
38 F 1
28 R 2
33 F 1
8 F 5
37 R 18
8 L 8
15 R 2
22 F 8
2 R 2
14 26
2 1
13 24 W
4 13 E
1 L 2
30 35
11 100
10 8 S
19 3 E
22 7 N
17 32 E
19 4 N
8 4 E
26 23 S
11 14 N
21 30 N
8 1 S
21 3 S
1 R 28
2 F 2
10 F 7
6 R 2
8 F 2
4 F 6
4 R 2
4 F 1
1 F 10
1 L 2
6 F 7
10 R 27
3 L 2
7 F 2
5 F 1
8 F 1
1 R 2
1 L 2
11 F 8
3 F 2
7 R 2
10 R 2
4 L 30
3 F 1
3 F 5
10 F 5
6 R 2
4 F 1
6 L 27
4 F 7
8 R 17
9 F 10
1 L 20
1 F 6
4 F 1
11 R 26
3 F 2
1 F 6
4 F 1
10 F 1
8 F 1
8 R 13
7 F 2
1 F 2
8 L 24
5 F 8
11 F 1
6 F 1
11 R 2
3 R 2
3 F 6
3 R 11
5 F 8
10 F 6
11 L 2
11 L 2
4 F 9
4 R 23
5 F 6
1 R 2
10 F 8
1 L 2
4 L 31
7 L 2
5 F 3
4 F 7
2 L 6
4 R 1
10 R 24
8 F 10
2 R 12
7 F 4
4 L 2
1 F 1
8 F 1
5 L 24
1 L 2
3 F 1
4 L 14
10 L 2
11 F 3
3 F 1
2 L 2
5 F 2
4 R 2
11 F 3
11 F 6
8 F 9
5 L 2
6 F 9
10 F 8
2 F 1
1 F 7
1 L 20
8 F 6
1 R 2
3 F 3
11 R 2
1 R 16
3 F 9
19 8
2 2
14 1 W
12 7 E
2 F 4
2 F 1
27 32
2 6
21 23 E
10 16 E
2 F 1
2 F 3
1 F 4
2 F 6
1 L 15
1 F 7
24 39
29 1
22 22 W
5 5 N
6 1 S
8 29 N
12 30 N
14 34 S
4 21 E
3 28 N
15 9 E
1 12 E
20 1 W
15 27 N
23 1 N
20 36 E
19 1 S
2 32 N
9 5 N
4 37 S
17 6 N
11 23 S
18 36 N
9 11 N
12 35 W
12 21 S
1 5 W
5 17 E
4 3 E
17 9 E
5 19 W
12 L 4
90 24
100 21
24 24 N
13 7 S
65 22 S
57 20 N
62 8 W
34 21 S
70 23 W
58 19 W
26 17 S
23 4 E
56 12 N
21 18 S
23 21 S
24 19 S
36 11 S
25 5 N
9 17 N
36 1 E
21 17 E
71 11 E
89 20 W
75 15 E
84 12 S
80 8 W
46 16 E
6 9 N
89 9 W
14 20 E
31 1 W
66 13 E
2 6 W
69 24 W
78 15 E
5 4 N
11 11 N
16 15 E
50 10 S
2 19 W
88 11 N
46 4 W
23 3 S
42 18 S
84 14 E
10 5 N
25 7 W
4 24 E
23 6 E
44 2 E
43 19 E
46 20 E
48 11 E
37 22 N
35 1 W
57 8 W
56 6 W
24 5 W
12 16 W
72 6 W
62 6 W
83 4 N
38 12 S
59 7 S
87 2 N
56 8 S
78 8 S
90 18 N
13 17 S
62 11 S
81 17 W
65 2 S
90 11 W
82 17 E
78 7 S
79 23 W
57 18 W
64 23 E
49 14 S
58 18 S
53 9 N
5 3 S
81 18 N
38 5 S
59 1 E
56 21 S
9 6 S
61 24 W
25 10 S
19 21 E
57 13 N
37 7 E
35 18 N
83 7 N
30 10 N
86 3 W
29 6 N
5 6 S
5 14 W
42 8 S
50 1 N
30 6 S
38 R 9
49 F 5
35 L 17
18 R 25
1 R 2
72 R 19
3 L 2
42 R 2
43 R 2
61 F 10
23 F 7
96 L 31
49 F 3
58 F 18
54 F 9
43 F 15
61 R 2
84 F 8
16 F 1
6 R 2
95 R 2
98 27
100 100
22 27 N
57 13 E
46 16 E
73 27 S
42 14 E
26 17 W
69 22 E
28 3 N
11 19 E
21 3 W
58 8 E
6 20 N
19 7 E
25 15 E
63 26 S
96 27 N
38 9 N
10 19 W
67 12 N
73 24 E
38 15 W
14 21 E
22 10 E
48 3 S
22 13 N
7 12 W
85 12 W
29 13 E
64 23 E
6 23 E
77 3 W
53 18 E
45 26 N
9 22 W
77 7 S
7 21 W
65 19 N
62 22 W
31 25 W
72 20 S
34 5 E
8 26 E
98 10 S
74 4 N
29 17 W
48 5 E
42 26 S
13 21 S
83 16 N
56 21 W
87 11 S
65 13 W
8 5 W
68 8 W
62 7 E
50 23 N
61 24 S
48 4 N
62 24 E
79 1 W
64 7 N
63 6 N
16 14 E
76 8 N
29 18 N
16 12 E
5 19 W
77 11 N
44 25 S
36 21 W
85 25 W
16 11 N
71 9 S
27 13 S
43 9 W
87 3 N
11 5 N
49 8 W
82 6 E
36 3 N
38 14 S
41 25 S
72 2 W
98 6 E
16 4 E
31 21 W
78 8 W
75 21 N
4 21 W
48 14 W
62 13 N
27 11 W
79 21 S
45 13 E
31 15 S
26 14 E
31 9 W
10 2 N
38 27 W
57 7 S
19 L 29
42 F 1
56 R 2
44 F 1
90 R 19
53 R 6
52 R 2
16 R 30
34 R 28
78 F 6
1 F 4
12 F 2
41 R 2
24 L 2
71 F 17
10 F 12
52 L 2
83 F 10
37 F 14
49 L 27
25 F 16
71 F 5
44 L 2
50 R 26
94 F 3
15 F 1
73 F 11
34 F 3
91 L 26
19 L 2
25 L 2
46 R 2
84 L 18
3 F 12
44 L 2
11 F 8
48 L 2
73 L 30
74 L 2
19 L 2
54 R 23
9 F 6
49 F 11
78 L 2
56 R 2
36 R 19
57 F 6
2 F 5
88 L 29
33 L 27
37 R 2
88 F 16
61 F 18
53 R 2
13 R 8
100 L 28
20 L 2
49 F 13
48 F 10
4 L 15
45 F 1
1 F 7
68 L 2
30 L 6
80 R 10
44 F 1
73 F 16
82 L 2
62 L 2
94 L 10
4 F 5
86 F 18
43 L 9
99 F 4
97 F 7
100 L 2
61 F 17
70 R 2
20 F 9
70 F 5
34 F 17
43 R 8
15 F 11
24 F 15
25 F 20
78 F 10
43 R 19
96 R 2
95 R 15
50 F 9
55 F 13
1 F 17
87 R 2
86 L 25
69 L 2
74 R 26
6 L 7
77 F 9
49 F 8
12 R 6
79 61
100 100
69 58 S
8 37 N
30 10 E
75 23 S
9 58 N
35 46 N
6 50 S
36 22 W
5 28 S
42 32 E
72 41 N
73 8 W
65 46 S
11 23 E
3 42 S
35 17 S
36 30 N
48 17 S
33 44 W
7 22 W
62 54 E
17 43 S
37 17 E
74 7 S
44 15 N
65 13 N
41 17 S
15 21 N
51 46 E
50 10 E
29 30 W
40 60 W
27 24 S
10 13 E
21 45 S
36 54 E
54 41 W
39 6 S
45 47 W
63 34 S
12 31 S
56 43 S
51 54 W
42 7 N
72 45 W
63 24 W
50 38 S
53 21 N
55 36 S
54 60 S
71 44 N
44 55 N
68 48 W
2 47 W
12 37 N
17 57 E
51 61 N
55 8 N
18 21 N
78 36 E
61 27 W
7 27 N
37 9 S
13 29 W
49 12 W
67 61 S
78 3 S
58 31 S
51 4 W
77 29 W
42 22 S
45 43 S
9 6 W
63 11 S
31 21 N
78 42 E
39 13 S
16 2 N
56 58 S
68 25 W
72 6 W
57 51 W
40 42 E
31 7 E
69 11 S
60 22 N
56 44 S
59 13 W
3 53 N
54 44 N
70 51 N
58 50 N
32 32 W
17 16 E
63 13 E
37 51 N
22 29 E
27 60 S
2 18 E
20 59 S
71 F 15
25 R 8
8 F 17
26 R 30
72 F 20
22 R 2
92 R 31
12 F 19
35 L 2
72 F 5
55 F 19
37 F 14
91 L 18
8 L 31
91 F 5
92 L 2
40 L 1
90 F 1
5 F 8
63 R 22
67 R 5
70 F 21
84 F 1
90 L 2
80 L 2
74 F 19
52 F 18
55 L 18
50 L 2
60 F 17
26 F 4
51 F 23
65 F 9
13 F 7
5 R 2
61 R 2
30 F 8
24 F 19
6 L 2
51 F 9
19 R 25
58 F 22
62 R 5
93 L 5
58 R 2
69 L 2
84 L 2
55 L 31
91 F 6
69 L 29
62 F 6
67 F 3
64 R 2
1 R 30
90 F 9
8 L 2
15 R 2
46 R 27
45 F 11
86 F 10
34 R 2
66 F 19
63 F 4
94 L 19
25 F 12
30 L 2
86 L 27
34 F 1
31 F 9
70 L 31
72 L 30
10 F 2
88 L 2
13 F 10
80 F 14
19 L 25
77 R 2
72 F 13
44 R 31
25 F 8
27 R 1
19 F 21
88 F 19
79 F 5
49 F 11
63 L 22
91 L 30
30 F 19
40 R 2
18 L 2
88 L 2
28 R 3
27 R 2
82 F 1
14 F 1
100 R 2
46 F 5
2 R 2
70 L 25
23 F 16
20 90
73 4
5 88 N
10 9 N
4 28 W
10 36 E
4 88 W
4 68 S
3 2 S
12 44 E
4 84 W
14 48 E
1 7 S
12 84 S
8 2 N
18 44 S
2 80 S
18 15 N
12 58 W
7 34 S
19 64 E
9 20 W
18 81 S
4 30 S
10 21 W
14 18 N
11 90 N
18 17 S
14 69 W
10 16 N
12 81 W
17 21 E
15 77 S
8 25 S
19 47 S
1 57 E
16 21 E
13 22 S
9 68 W
16 3 S
12 37 E
19 73 S
13 30 E
14 24 E
11 65 E
13 39 W
9 36 E
13 27 S
13 67 W
10 48 E
15 75 E
2 1 W
12 75 E
3 45 S
9 58 E
8 9 S
4 32 E
11 54 E
13 75 S
11 75 N
7 81 E
1 59 S
10 42 E
12 31 S
4 87 N
20 46 E
5 29 N
16 20 S
13 84 W
9 78 N
5 63 S
10 90 W
6 46 W
14 57 W
11 43 S
15 F 10
56 R 2
34 F 16
39 F 10
100 100
100 100
42 58 S
49 6 N
40 70 W
8 97 N
57 65 S
85 68 E
75 45 E
17 59 N
43 40 W
2 84 W
14 96 E
12 7 W
10 26 N
48 41 N
82 73 N
53 39 N
49 87 W
96 43 W
4 11 E
63 72 W
45 58 N
23 20 W
69 77 W
15 49 N
61 8 E
47 90 E
88 11 W
60 26 S
89 25 E
11 9 N
62 61 E
62 60 N
93 32 N
59 30 E
38 64 N
14 46 W
74 2 N
47 40 N
72 87 S
58 17 E
97 89 E
68 6 W
82 20 W
73 85 E
61 75 N
42 9 N
45 96 E
84 94 N
26 36 S
44 63 W
35 52 E
97 67 E
98 22 W
2 16 W
88 36 S
86 92 W
67 39 W
4 82 N
48 61 S
23 7 W
41 4 N
98 38 E
65 36 N
48 16 N
61 11 N
52 30 S
16 46 E
54 75 N
42 63 W
37 79 W
29 50 N
81 58 S
42 32 S
60 75 E
6 56 W
82 9 W
23 96 N
95 26 E
62 18 S
54 1 N
87 89 W
26 79 N
20 20 N
91 56 W
6 74 W
57 9 N
25 12 N
39 58 S
57 2 W
33 21 N
69 59 N
10 23 W
26 7 E
25 76 S
74 12 W
87 40 E
7 97 W
50 81 S
78 63 N
51 96 N
34 F 12
77 F 4
75 F 3
5 L 27
17 F 8
77 R 2
87 F 30
8 F 5
95 F 13
17 L 12
70 R 2
45 F 15
44 R 27
76 L 59
91 F 9
89 L 2
67 F 27
76 F 7
73 F 10
73 F 8
15 R 27
47 F 5
49 L 16
82 R 2
15 F 10
56 F 2
40 F 26
37 L 26
7 R 2
19 L 2
42 F 1
76 F 2
37 L 3
73 R 14
5 R 2
67 F 25
15 R 2
64 F 1
61 L 2
16 L 21
89 R 2
37 F 12
80 R 29
96 R 11
90 F 20
44 R 3
46 F 3
56 L 2
36 L 2
95 L 16
45 R 2
75 F 2
22 R 27
71 F 6
22 L 7
27 F 3
90 F 5
10 F 1
88 R 2
24 L 29
91 R 14
21 L 22
91 F 9
46 L 2
82 R 3
50 R 2
76 R 11
47 L 2
96 L 4
34 F 9
72 F 27
35 L 28
96 F 17
21 F 16
55 F 22
89 L 17
60 R 26
7 F 22
23 R 20
16 R 31
62 L 12
60 L 2
8 L 1
29 R 10
58 F 18
36 F 8
55 F 7
4 F 2
69 L 23
76 L 2
31 F 21
29 F 3
14 L 2
94 R 2
34 L 27
21 L 2
78 L 7
4 R 2
9 F 29
78 F 16 output:
Robot 1 crashes into the wall
OK
Robot 9 crashes into robot 6
Robot 9 crashes into robot 2
Robot 9 crashes into robot 3
Robot 9 crashes into robot 7
Robot 2 crashes into the wall
Robot 3 crashes into robot 2
Robot 4 crashes into the wall
Robot 12 crashes into the wall
Robot 2 crashes into the wall
Robot 3 crashes into the wall
Robot 2 crashes into the wall
Robot 2 crashes into the wall
OK
Robot 33 crashes into robot 32
Robot 25 crashes into robot 15
Robot 2 crashes into the wall
Robot 3 crashes into the wall
Robot 3 crashes into robot 2
Robot 1 crashes into the wall
Robot 30 crashes into robot 27
OK
Robot 2 crashes into robot 11
OK
OK
OK
Robot 61 crashes into robot 82
Robot 1 crashes into the wall
Robot 71 crashes into robot 44
Robot 34 crashes into robot 72
OK
POJ 2632 Crashing Robots (坑爹的模拟题)的更多相关文章
- 模拟 POJ 2632 Crashing Robots
题目地址:http://poj.org/problem?id=2632 /* 题意:几个机器人按照指示,逐个朝某个(指定)方向的直走,如果走过的路上有机器人则输出谁撞到:如果走出界了,输出谁出界 如果 ...
- poj 2632 Crashing Robots(模拟)
链接:poj 2632 题意:在n*m的房间有num个机器,它们的坐标和方向已知,现给定一些指令及机器k运行的次数, L代表机器方向向左旋转90°,R代表机器方向向右旋转90°,F表示前进,每次前进一 ...
- POJ 2632 Crashing Robots (模拟 坐标调整)(fflush导致RE)
题目链接:http://poj.org/problem?id=2632 先话说昨天顺利1Y之后,直到今天下午才再出题 TAT,真是刷题计划深似海,从此AC是路人- - 本来2632是道略微恶心点的模拟 ...
- poj 2632 Crashing Robots
点击打开链接 Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6655 Accepted: ...
- POJ 2632 Crashing Robots(较为繁琐的模拟)
题目链接:http://poj.org/problem?id=2632 题目大意:题意简单,N个机器人在一个A*B的网格上运动,告诉你机器人的起始位置和对它的具体操作,输出结果: 1.Robot i ...
- poj 2632 Crashing Robots 模拟
题目链接: http://poj.org/problem?id=2632 题目描述: 有一个B*A的厂库,分布了n个机器人,机器人编号1~n.我们知道刚开始时全部机器人的位置和朝向,我们可以按顺序操控 ...
- POJ 2632 Crashing Robots 模拟 难度:0
http://poj.org/problem?id=2632 #include<cstdio> #include <cstring> #include <algorith ...
- Poj OpenJudge 百练 2632 Crashing Robots
1.Link: http://poj.org/problem?id=2632 http://bailian.openjudge.cn/practice/2632/ 2.Content: Crashin ...
- poj 2632 Crashing Robots_模拟
做的差点想吐,调来调去,编译器都犯毛病,wlgq,幸好1a. 题意:给你机器人怎走的路线,碰撞就输出 #include <cstdlib> #include <iostream> ...
随机推荐
- TCP和UDP的"保护消息边界" (经典)
在socket网络程序中,TCP和UDP分别是面向连接和非面向连接的.因此TCP的socket编程,收发两端(客户端和服务器端)都要有一一成对的socket,因此,发送端为了将多个发往接收端的包,更有 ...
- Android AES加密算法及事实上现
昨天老大叫我看看android加密算法.于是网上找了找,找到了AES加密算法.(当然还有MD5,BASE64什么的http://snowolf.iteye.com/blog/379860这篇文章列举了 ...
- G-Sensor 校准标准
在桌面上水平平,自己的前表面. 此时Z轴应+值,和值至9.8大约,x.y轴应0值大约.它是平行于主体x轴,固定的左,提起右侧时,,x轴数值它应0开始增加.直到垂直时,+9.8大约. 为y轴.下面固定. ...
- UVa 725暴力求解
A - Time Limit:3000MS Memory Limit:0KB 64bit IO Format:%lld & %llu Su Description Writ ...
- linux eclipse中运行android AVD 错误
当使用android的AVD时提示以下错误: Starting emulator for AVD 'NexusOne' ERROR: 32-bit Linux Android emulator bin ...
- 再写KMP算法
#include<iostream> #include<string> using namespace std; void getNext(char const*T,int l ...
- C-最长回文子串(2)
在上一篇的文章中说到了,最长回文子串的问题,并且提到了基本的解决办法,即暴力求解法.效率O(N^3) 中心法求最长回文子串 我们知道回文字符串是以字符串中心对称的,如abba以及aba等.一个更好的办 ...
- [置顶] 小白学习KM算法详细总结--附上模板题hdu2255
KM算法是基于匈牙利算法求最大或最小权值的完备匹配 关于KM不知道看了多久,每次都不能完全理解,今天花了很久的时间做个总结,归纳以及结合别人的总结给出自己的理解,希望自己以后来看能一目了然,也希望对刚 ...
- oracle 11gR2 在VM中安装步骤
oacle的安装 一.在oracle官网可以免费下载oracle的软件和安装文档,如果是在虚拟机中的linux系统里安装,可以用FileZilla Client把软件发送到系统中. linux_11g ...
- <脱机手写汉字识别若干关键技术研究>
脱机手写汉字识别若干关键技术研究 对于大字符集识别问题,一般采用模板匹配的算法,主要是因为该算法比较简单,识别速度快.但直接的模板匹配算法往往无法满足实际应用中对识别精度的需求.为此任俊玲编著的< ...