stm32CubeMx CAN 发送数据
平台 STM32F429
软件 STM32CubeMx 5.0.0
固件库 STM32Cube_FW_F4_V1.23.0
目的: 实现 CAN 的发送
一 简介
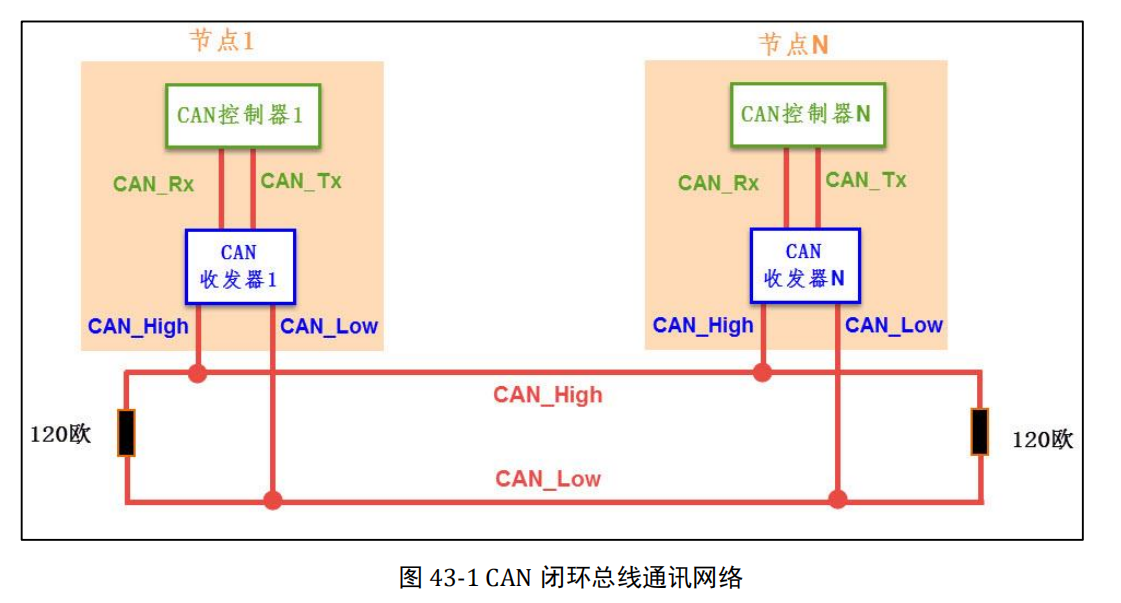
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发了的,并最终成为国际标准(ISO11898)。是国际上应用最广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
二 创建工程
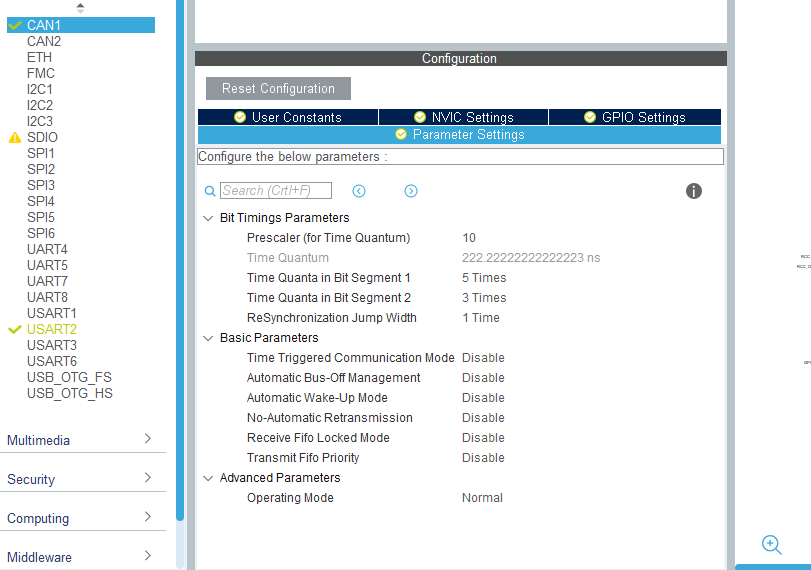
生成代码
修改代码
启动 CAN
HAL_CAN_Start(&hcan1);
发送数据
CAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[] = {0x23, 0x81, 0x60, 0x00, 0x55, 0x55, 0x08, 0x00};
uint32_t TxMailbox;
uint32_t std_id = 0x601; TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.StdId=std_id;
TxHeader.TransmitGlobalTime = DISABLE;
TxHeader.DLC = ; if (HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox) != HAL_OK)
{
/* Transmission request Error */
Error_Handler();
}
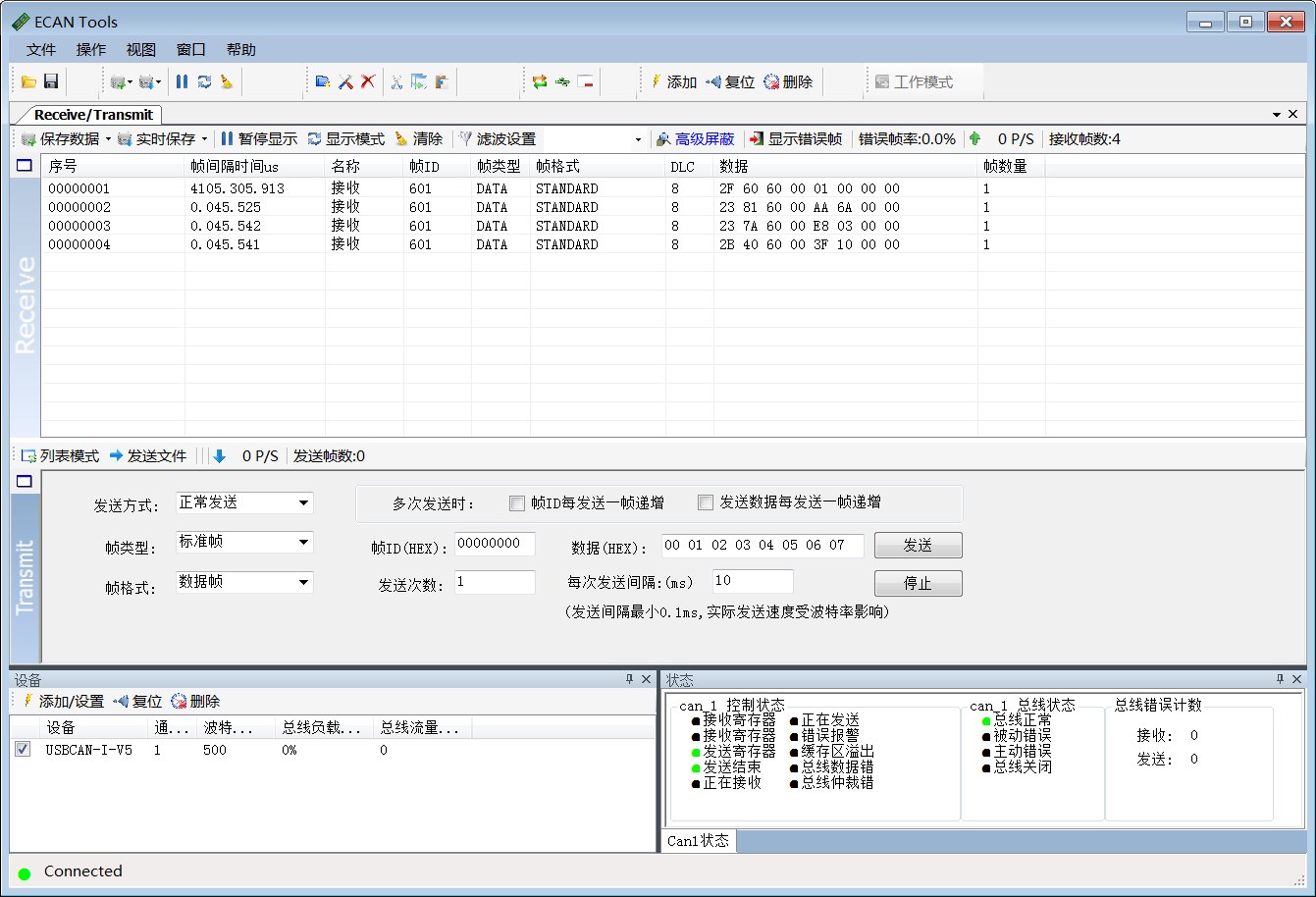
实验结果:
使用USB转CAN盒,打开ecantools软件,波特率为500k
按下按键,收到数据
代码 已上传到gitHub上 https://github.com/itachi1121/stm32-can.git
stm32CubeMx CAN 发送数据的更多相关文章
- 【原生态】Http请求数据 与 发送数据
今天项目组小弟居然问我怎么用java访问特定的地址获取数据和发送请求 Http请求都是通过输入输出流来进行操作的,首先要制定GET或者POST,默认是GET,在安全和数据量较大情况下请使用post 根 ...
- POST在发送数据的时候使用的是HTTP命令
防止SQL注入 SQL(结构化查询语言)是基于美国国家标准学会(ANSI)标准,并作为共同的语言与数据库通信.每个数据库系统增加了一些专有功能到基本的ANSI SQL. SQL注入是一门将制作好的SQ ...
- sim800 gprs发送数据的AT流程
switch(send_flag) { case 1: uart_send(&huart4,"AT\r\n",4); //AT break; case 2: uart_se ...
- 通过 UDP 发送数据的简单范例
package j2se.core.net.udp; import java.io.IOException;import java.net.DatagramPacket;import java.net ...
- STM32移植RT-Thread后的串口在调试助手上出现:(mq != RT_NULL) assert failed at rt_mq_recv:2085和串口只发送数据不能接收数据问题
STM32移植RT-Thread后的串口在调试助手上出现:(mq != RT_NULL) assert failed at rt_mq_recv:2085的问题讨论:http://www.rt-thr ...
- Linux内核--网络栈实现分析(八)--应用层发送数据(下)
本文分析基于Linux Kernel 1.2.13 原创作品,转载请标明http://blog.csdn.net/yming0221/article/details/7547826 更多请查看专栏,地 ...
- C#串口通信—向串口发送数据,同步接收返回数据
最近写C#串口通信程序,系统是B/S架构.SerialPort类有一个DataReceived事件,用来接收串口返回的数据,但这种方式在C/S架构下很好用,但B/S就不好处理了.所以写了一个同步模式接 ...
- SSH服务器与Android通信(3)--Android客户端发送数据
Android客户端向SSH服务器发送数据主要有三种情况:通过客户端删除数据.添加数据和修改数据. 1.删除数据 先看看jsp文件里面是怎样删除数据的: <td align="cent ...
- php以post方式向接口发送数据
工作需要,我负责收集服务器数据,然后定时向中心服务器发送.我看到了接口信息,需要设置heads头信息,需要发送数据,且是post方式. 这里就用到了curl //发送post请求 function r ...
随机推荐
- 「JSOI2015」最大公约数
「JSOI2015」最大公约数 传送门 考虑先枚举区间左端点, 然后我们会发现所有可能的区间虽然有 \(O(n)\) 个,但是本质不同的区间 \(\gcd\) 只有 \(\log n\) 级别,而且是 ...
- 输入url到展示页面过程发生了什么?
输入网址,首先在书签或者历史记录里面去搜索相关的网址推荐给你 浏览器查找域名的IP的地址(在hosts文件有没有对应IP -> 浏览器发出一个DNS请求到本地DNS服务器,本地服务器一般是网 ...
- SVM总结(参考源码ml.hpp)
如何使用,请查阅我的另一篇博客——SVM的使用 1.setType() SVM的类型,默认SVM::C_SVC.具体有C_SVC=100,NU_SVC=101,ONE_CLASS=102,EPS_SV ...
- [read -p应用]插拔光模块去检查port present状态
#!/bin/bash path="/sys/devices/platform/soc/fd880000.i2c-pld/i2c-0/i2c-4/i2c-15/15-0060" a ...
- WDF驱动中KMDF与UMDF区别
抄的 早期的Windows 95/98的设备驱动是VxD(Virtual Device Driver),其中x表示某一类设备.从Windows 2000开始,开发驱动程序必以WDM(Windows D ...
- rails work
4.2 Say "Hello", Rails problem weppack not install solve run the command rails webpacker:i ...
- 「Luogu P2468 [SDOI2010]粟粟的书架」
这道题分为两个部分 Part1 前置芝士 前缀和(后缀和,二维前缀和):可以预处理一下数据. 二分查找:可以在较短的时间内找出答案. 具体做法 可以发现\(R,C\)不大,只有\(200\),于是可以 ...
- vue中配置sass(包含vue-cli 3)
目录 vue vue cli 3 老版本的脚手架搭建的项目 版本 安装 不用修改任何配置 vue文件中使用 vue 更新时间: 2018-09-21 vue cli 3 选择 Manually sel ...
- Python 基础之循环结构for及break pass continue
一.for 循环 #循环 变量 迭代 都是一个意思#把列表里面的元素意义的拿出来就是遍历listvar = ["one","two","three&q ...
- 【快学springboot】使用springboot发送邮件
前言 在实际项目中,经常需要用到邮件通知功能.比如,用户通过邮件注册,通过邮件找回密码等:又比如通过邮件发送系统情况,通过邮件发送报表信息等等,实际应用场景很多.这篇文章,就教大家通过springbo ...