康谋方案 | 高精LiDAR+神经渲染3DGS的完美融合实践
在自动驾驶时代奔涌向前的路上,仿真测试早已不再是可选项,而是验证智能驾驶系统安全性、鲁棒性和泛化能力的刚需,如何提升仿真测试的保真度已成为无法避免的重要话题。
这正是“数字孪生”出现的时代背景。本文为大家详细介绍如何用传统与前沿结合的数字孪生构建流程,再配合3DGS 的神经网络重建技术,为自动驾驶仿真测试注入真正的“现实之眼”。
一、从点云到高精地图的重建
依托独家的aiData工具链与aiSim仿真平台,本文建立了一套高精度数字孪生地图构建流程,已经广泛应用于布达佩斯 Kolosy广场、ZalaZone测试场等真实道路还原项目。整个流程包括:

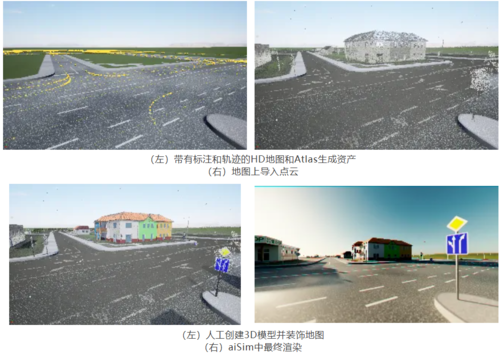
(左)带有标注的HD地图、(中)装饰HD地图、(右)aiSim中渲染
1、数据采集
采用搭载激光雷达(LiDAR)、高精度GNSS/INS系统的测绘车(如康谋DATALynx ATX4)执行移动激光扫描(MLS),通过aiData Recorder进行录制,主要路线至少绘制两次,确保厘米级空间精度。

数采车示意图
2、点云聚合
使用aiData Annotator将多帧点云拼接为统一的全局坐标系,结合反射率、时间戳等多通道信息形成高密度、低误差的空间点集。
Tips:详细数据采集精度和点云数据格式可联系康谋技术团队获取,可接受第三方数据,但建议在采集前与我们技术团队沟通优化策略。
3、高精地图建模
基于聚合点云手工标注道路元素:车道线、交通标志、人行道、护栏、红绿灯等。输出为GeoPackage格式的HD Map,用于自动驾驶系统参考。
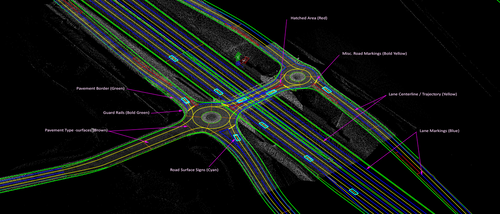
ZalaZone试验场 LiDAR点云建模

ZalaZone试验场卫星参考图像
4、三维建模与装饰
借助Atlas程序化建模引擎,生成道路、地形等基础结构,再通过aiSim Unreal插件手工装饰建筑、植被、街景设施,最大程度复现现实细节。为了获取最大精度,康谋将会采用DCC工具,例如Maya、Blender、Substance等工具利用可用数据构建新模型;
二、颠覆性革新:NeRF 与 3DGS 重建
传统方式固然精准,但高成本、高周期、强人工依赖,难以支撑大规模、快速迭代的测试需求。
本文分享的神经网络重建方案,则以NeRF+ 3DGS为核心技术,实现了从真实环境到仿真世界的跃迁:
1、仅需数日,完成街景重建
相比传统数月的手动建模,神经网络重建只需几天时间,就能将采集到的图像和点云数据自动生成高保真的三维静态场景。

在aiSim中重建Waymo场景
2、进一步消除 Domain gap,场景逼真如实地拍摄
通过DEVIANT算法验证3D目标检测精度、Mask2Former测量像素一致性等方式,验证了神经重建场景在多摄像头视角下的高可用性与仿真一致性。
请查看最新发表的论文“Hybrid Rendering for Multimodal Autonomous Driving: Merging Neural and Physics-Based Simulation”
3、降本增效,拒绝重复建模
方案致力于告别繁复的建模软件与人工建模流程,实现端到端自动化构建,大幅降低人力与制作成本。
4、场景增强与标准兼容
在生成的三维场景中,可灵活添加动态对象(车辆、行人、信号灯等),并全面兼容OpenSCENARIO标准,适配多种自动驾驶测试平台。
三、重建工作流:从采集到仿真部署
神经网络重建方案遵循高度自动化流程:
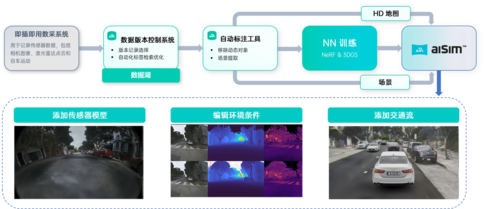
流程图
(1)数据采集: 使用DATALynx ATX4记录图像、LiDAR点云和自车位姿;推荐配置包括Hesai Pandar64、环视非鱼眼摄像头和NovAtel高精度组合导航系统。
(2)数据转换:将原始数据转化为康谋格式,统一处理点云、图像和标定信息。
(3)自动标注: 利用aiData工具链去除动态目标、生成GT数据,实现非因果式追踪。

环视系统自动标注
(4)神经网络训练: 使用NeRF/3DGS算法生成高精度三维场景。
(5)仿真部署与增强: 在aiSim仿真平台中集成重建场景,配置不同环境(暴雨、夜晚、雪天)、多模态传感器(摄像头、LiDAR、毫米波雷达等)与虚拟交通流。

雨天场景
四、仿真世界,无需困于“假”
在自动驾驶技术快速发展的今天,数字孪生已从简单的场景复制,进化为具备真实物理特性的虚拟世界。我们和众多同行们正在见证一场仿真技术的革命:
(1)通过激光雷达的精准测绘确保厘米级精度
(2)借助3DGS/NeRF实现场景的智能重建
(3)融合传统与创新的技术优势
如何致力于将传统构建流程与前沿神经网络重建技术相融合,用速度、真实与自动化重塑自动驾驶仿真测试的范式,是业内面临的共同难题。
康谋方案 | 高精LiDAR+神经渲染3DGS的完美融合实践的更多相关文章
- 【Apollo自动驾驶源码解读】车道线的感知和高精地图融合
模式选择 在modules/map/relative_map/conf/relative_map_config.pb.txt文件中对模式进行修改: lane_source: OFFLINE_GENER ...
- zz高精地图和定位在自动驾驶的应用
本次分享聚焦于高精地图在自动驾驶中的应用,主要分为以下两部分: 1. 高精地图 High Definition Map 拓扑地图 Topological Map / Road Graph 3D栅格地图 ...
- 高精地图技术专栏 | 基于空间连续性的异常3D点云修复技术
1.背景 1.1 高精资料采集 高精采集车是集成了测绘激光.高性能惯导.高分辨率相机等传感器为一体的移动测绘系统.高德高精团队经过多年深耕打造的采集车,具有精度高.速度快.数据产生周期短.自动化程度高 ...
- WEB 三维引擎在高精地图数据生产的探索和实践
1. 前言 高精地图(High Definition Map)作为自动驾驶安全性不可或缺的一部分,能有效强化自动驾驶的感知能力和决策能力,提升自动驾驶的等级.对于自动驾驶来说,高精地图主要是给机器用的 ...
- BZOJ.1210.[HNOI2004]邮递员(插头DP Hash 高精)
BZOJ 洛谷 http://www.cnblogs.com/LadyLex/p/7326874.html 插头DP.\(m+1\)个插头的状态需要用三进制表示:\(0\)表示无插头,\(1\)表示是 ...
- 洛谷P4608 [FJOI2016]所有公共子序列问题 【序列自动机 + dp + 高精】
题目链接 洛谷P4608 题解 建个序列自动机后 第一问暴搜 第二问dp + 高精 设\(f[i][j]\)为两个序列自动机分别走到\(i\)和\(j\)节点的方案数,答案就是\(f[0][0]\) ...
- BZOJ1089 [SCOI2003]严格n元树 【dp + 高精】
Description 如果一棵树的所有非叶节点都恰好有n个儿子,那么我们称它为严格n元树.如果该树中最底层的节点深度为d (根的深度为0),那么我们称它为一棵深度为d的严格n元树.例如,深度为2的严 ...
- BZOJ2729 [HNOI2012]排队 【高精 + 组合数学】
题目链接 BZOJ2729 题解 高考数学题... 我们先把老师看做男生,女生插空站 如果两个老师相邻,我们把他们看做一个男生,女生插空站 对于\(n\)个男生\(m\)个女生的方案数: \[n!m! ...
- [CEOI2007]树的匹配Treasury(树形DP+高精)
题意 给一棵树,你可以匹配有边相连的两个点,问你这棵树的最大匹配时多少,并且计算出有多少种最大匹配. N≤1000,其中40%的数据答案不超过 108 题解 显然的树形DP+高精. 这题是作为考试题考 ...
- POJ 3181完全背包(+高精)
思路: f[i]表示还剩i空间的方案数 套个高精 (网上有人把它拆成了两个long long) 其实这道题的高精并不难写-.. //By SiriusRen #include <cstdio&g ...
随机推荐
- Go配置管理神器—Viper中文教程
Viper中文教程 Viper是适用于Go应用程序的完整配置解决方案.它被设计用于在应用程序中工作,并且可以处理所有类型的配置需求和格式. 安装 go get github.com/spf13/vip ...
- 用Adobe Illustrator编辑ArcGIS地图的方法
本文介绍在ArcGIS下属的ArcMap软件中,将绘制好的地图导出为.ai或者.eps格式文件,并在Adobe Illustrator软件中进一步编辑地图,并最终导出为图片格式的结果文件的方法. ...
- BUUCTF---rsa_output
题目 点击查看代码 {21058339337354287847534107544613605305015441090508924094198816691219103399526800112802416 ...
- Golang高性能引擎:ZKmall开源商城支撑百万级日活交易流畅运行
在电商业务高并发.低延迟的严苛场景下,技术栈的选择直接决定系统上限.ZKmall开源商城基于Golang技术生态,以协程级并发.毫秒级响应为核心优势,为百万级日活电商平台提供高性能解决方案.本文从架构 ...
- 【ESP32】移植 Arduino 库到 idf 项目中
今天咱们要聊的内容非常简单,所以先扯点别的.上一篇水文中,老周没能将 TinyUSB 的源码编译进 Arduino 中,心有两百万个不甘,于是清明节的时候再试了一次,居然成功了,已经在 esp32 开 ...
- 武汉工程大学2020GPLT选拔赛(重现赛)
L2-4 缘之空 1.使用倍增法求最近公共祖先,然后利用公共祖先计算两点的树上距离 2.但是此题并没有提供根节点,所以要先找到根节点以后才可以进行倍增法求lca /** - swj - * /> ...
- socket tcp断线重连
一.网上常用方法1.当Socket.Conneted == false时,调用如下函数进行判断 点击(此处)折叠或打开 /// <summary> /// 当socket.connecte ...
- 基于transformer的机器翻译:手把手教你实现
目录 前言 transformer模型的搭建 Input embedding Encoder Decoder output transformer构建 data数据集处理 train config 参 ...
- java基础之二分查找,可变参运用
一. public class BinarySeachTest { public static void main(String[] args) { int[] arr = new int[]{22, ...
- memcached DRDOS攻击实验
memcached DRDOS攻击实验 一.前提 关于drdos DRDoS(Distributed Reflection Denial of Service) 指的是利用IP Spoofing技术, ...