AnswerOpenCV(0826-0901)一周佳作欣赏
1、OpenCV to detect how missing tooth in equipment
Hello everyone. I am just starting with OpenCV and still a bit lost.
Is OpenCV helpful to detect the position of a missing object (tooth for example)?
I would like to build a code to analyze an image of an equipment and detect which tooth is missing and its position.
For example in the image attached below of an equipment that has 9 teeth normally: the code should show a message that the 2nd tooth is missing.
Is this possible with OpenCV? If yes, where do I start?
Attached you will find the figure. 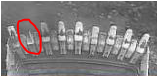
寻找这种类似齿轮的问题,可以在hull距的前提下,进行专门的处理。有兴趣可以继续研究,当然它这个图像质量比较差。
相关函数
convexityDefects
https://docs.opencv.org/master/d3/dc0/group__imgproc__shape.html#gada4437098113fd8683c932e0567f47ba
提供教程:https://docs.opencv.org/master/d5/d45/tutorial_py_contours_more_functions.html
2、Detect equipment in desired position
Hello everyone!
Is It possible to evaluate some pictures and save them Just when the object is in some desired position?
For example: monitoring a vídeo of an equipment that moves in and out of the scene. I would like to detect the time when the equipment is fully in the scene and then save It in a desired folder.
Thanks a Lot and have a great weekend
这个问题问的有点不清楚,也可能是非英语为母语的人提出的。实际上他想说明的、寻求的应该是一个MOG问题。
一旦项目由静态的图片提升到了动态的视频,在维度上面就有了提高,因此也会出现许多新的问题。
3、Does findContours create duplicates
Hi,I'm considering a binary image from which I extract its edges using cv::Canny. Consequently, I perform cv::findContours, storing all the contours points coordinates in a
vector < vector < Point > >
I noticed that the number of pixels (Points) in this structure is greater than the number of pixels I get by computing
vector<point> white_pixels;
findNonZero(silhouette, white_pixels);
on the same image.
Therefore I'm wondering if this happens because findContours includes duplicate points in its result or because findNonZero is less precise.
E.g. on a 200x200 sample image with the first method I get 1552 points while with the second I get 877.
In case the first hypothesis is correct, is there a way to either ignore the duplicates or remove them?
非常关键的一题,许多大神给出解答
a、
In case of a Canny edge image findContours will find most of the contour points twice, because the line width is only 1 and findContours is looking for closed contours.
To remove duplicates you can map the contour points to an empty (zero) image.For every contour point add 1 at the image position and only copy the contour point to your new contour vector if the value at this position is zero. That would be the easiest way I think.
Comments
Thanks! Actually, I did what you suggested using the same sample image and also counting how many pixels were set to 1 (without repetitions). I ended up with having exactly 877 white pixels in the new Mat::zeros image. At this point, i think the result I get by using "findNonZero" is correct, accurate and in this case more efficient since I can avoid the double for loop I used for mapping the contour points for this test.
b、My first answer was wrong. @matman answer is good but I think problem is in blurred image.
If you don't blur enough image you will have many double points. You shape become a line but at beginning your shape could be a rectangle.
if you find double point in your contour may be you have to increase blurring (shape like 8 could be a problem). For fractal shape (or with a large rugosity) it is difficult to delete those points.
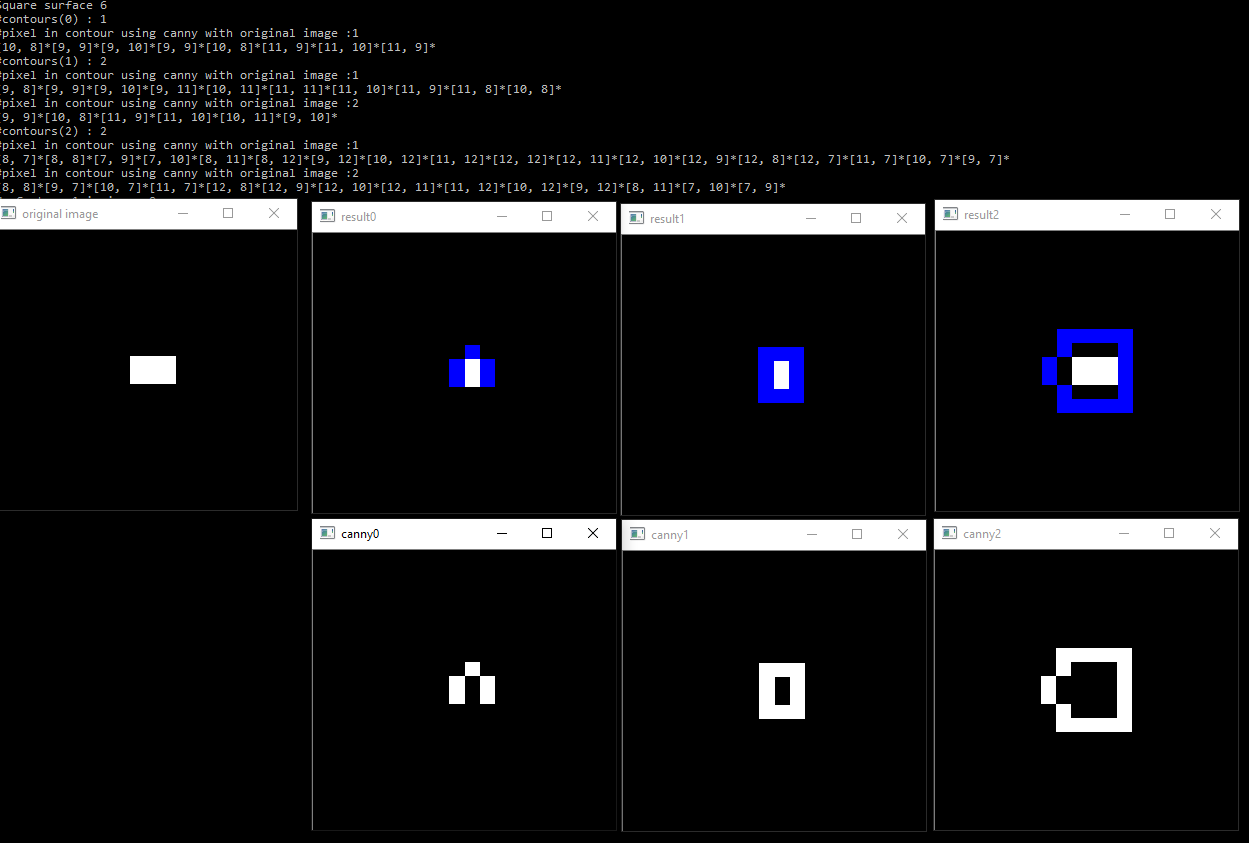
In this example I use :surface rectangle 6 (width 3 and height 2)
canny witout blurring Image 0
canny with blur size 3 image 1
Canny with blur size 5 image 2
Source file
{
Mat x = Mat::zeros(20,20,CV_8UC1);
Mat result = Mat::zeros(20,20,CV_8UC3);
vector<Vec3b> c = { Vec3b(255, 0, 0), Vec3b(0,255,0),Vec3b(0,0,255),Vec3b(255, 255, 0),Vec3b(255, 0, 255),Vec3b(0, 255, 255) };
for (int i=9;i<=10;i++)
for (int j = 9; j <= 11; j++)
{
x.at<uchar>(i,j)=255;
result.at<Vec3b>(i,j)=Vec3b(255,255,255);
}
imwrite("square.png",x);
Mat idx;
findNonZero(x,idx);
cout << "Square surface " << idx.rows<<endl;
vector<vector<vector<Point> >> contours(3);
vector<Vec4i> hierarchy;
double thresh=1;
int aperture_size=3;
vector<Mat> xx(3);
vector<Mat> dst(3);
for (size_t i = 0; i < xx.size(); i++)
{
if (i==0)
xx[i]=x.clone();
else
blur(x, xx[i], Size(static_cast<int>(2*i+1),static_cast<int>(2*i+1)));
Canny(xx[i], dst[i],thresh, thresh, 3,true );
namedWindow(format("canny%d",i),WINDOW_NORMAL);
namedWindow(format("result%d",i),WINDOW_NORMAL);
imshow(format("canny%d",i),dst[i]);
findContours(dst[i],contours[i], hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
}
namedWindow("original image",WINDOW_NORMAL);
imshow("original image",x);
/*
Mat dx,dy,g;
Sobel(x, dx, CV_16S, 1, 0, aperture_size, 1, 0, BORDER_REPLICATE);
Sobel(x, dy, CV_16S, 0, 1, aperture_size, 1, 0, BORDER_REPLICATE);
namedWindow("gradient modulus",WINDOW_NORMAL);
g = dx.mul(dx) + dy.mul(dy);
imshow("gradient modulus",g);
findContours(x,contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
cout << "#contours : " << contours.size()<<endl;
if (contours.size() > 0)
{
for (size_t i = 0; i < contours.size(); i++)
{
cout << "#pixel in contour of original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[i].size();j++)
cout << contours[i][j] << "*";
cout<<endl;
drawContours(result, contours, i, c[i]);
}
}*/
size_t maxContour=0;
for (size_t k = 0; k < 3; k++)
{
cout << "#contours("<<k<<") : " << contours[k].size()<<endl;;
if (maxContour<contours[k].size())
maxContour= contours[k].size();
if (contours[k].size() > 0)
{
for (size_t i = 0; i<contours[k].size();i++)
{
cout << "#pixel in contour using canny with original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[k][i].size();j++)
cout << contours[k][i][j] << "*";
cout<<endl;
}
}
else
cout << "No contour found "<<endl;
}
int index=0;
while (true)
{
char key = (char)waitKey();
if( key == 27 )
break;
if (key == '+')
{
index = (index+1)%maxContour;
}
if (key == '-')
{
index = (index-1);
if (index<0)
index = maxContour-1;
}
vector<Mat> result(contours.size());
for (size_t k = 0; k < contours.size(); k++)
{
result[k] = Mat::zeros(20,20,CV_8UC3);
for (int ii=9;ii<=10;ii++)
for (int jj = 9; jj <= 11; jj++)
{
result[k].at<Vec3b>(ii,jj)=Vec3b(255,255,255);
}
if (index<contours[k].size())
drawContours(result[k], contours[k], static_cast<int>(index), c[index]);
else
cout << "No Contour "<<index<<" in image "<<k<<endl;
imshow(format("result%d",k),result[k]);
}
cout << "Contour "<<index<<endl;
}
exit(0);
}
但是对于今天的我来说,分析重复轮廓的意义在哪里了?很多时候,我都只是找最大的外围轮廓就可以的。
4、FindContours Duplicate Points
I am using OpenCV 3.4.1 with VS2015 C++ on a Win10 platform.
My question relates to findContours and whether that should be returning duplicate points within a contour.
For example, I have a test image like this:
I do Canny on it and then I run findContours like this:
findContours(this->MaskFrame,this->Contours,this->Hierarchy,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
When I check the resulting contours like this:
for (int x = 0; x < Images->Contours.size(); x++)
for (int y = 0; y < Images->Contours[x].size(); y++)
for (int z = y + 1; z < Images->Contours[x].size(); z++)
if (Images->Contours[x][y] == Images->Contours[x][z])
printf("Contours duplicate point: x: %d, y: %d z: %d\n", x, y, z);
I can see there there are many/hundreds of duplicate points within a given contour.
The presence of the duplicates seems to cause a problem with the drawContours function.
Nevertheless, this image shows that 6 contours were detected with ~19,000 points comprising all the contours, the largest contour has ~18,000 points, but there are 478 points that are duplicated within a contour.
However, this only seems to occur if the total number of points in a given contour is fairly large, e.g., > 2000 points.If I arrange the image so that no contour has more than ~2000 points, as below, then there are no duplicates.
In this image, there are 11 contours, there are ~10,000 points comprising all the contours, with the largest contour having ~1,600 points, and no duplicates.
Before I try and get deep into findContours or something else, I thought I would ask: anyone have any ideas why I am seeing duplicate points within a contour?
Thanks for any help.
这里的具体运用,可能就是问题3的意义所在:通过轮廓分析来获得定量数据。
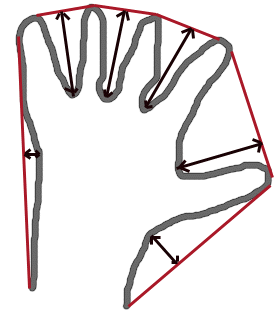
5、how to find the REAL width and height of contours
这道题目是我问的,而且也给出了最优回答,应该说是有价值的。
there is a image of 3 shapes 
int main( int argc, char** argv )
{
//read the image
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (int i = 0;i<contours.size();i++)
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
but ,in fact ,the contour 1 and contour 2 which i fingure out in RED do not get the right widht and height.
what i want should be this
i did't find the appropriate function or any Doc from Opencv to do this workIt's been bothering me for daysany help will be appreciate!
e 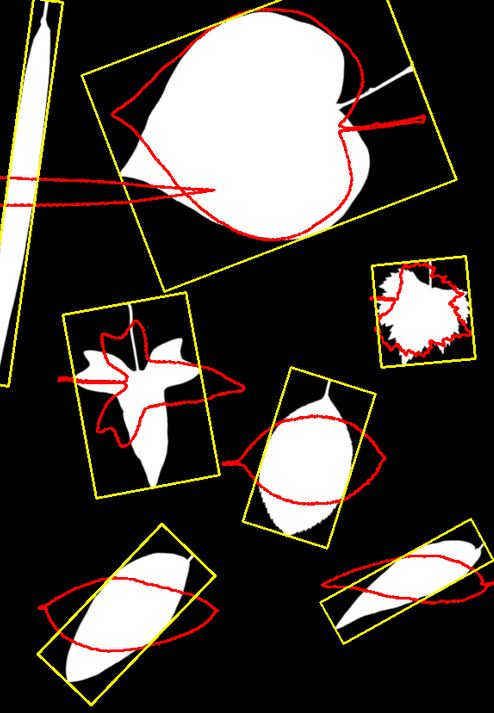
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
#define DEBUG FALSE
Point2f GetPointAfterRotate(Point2f inputpoint,Point2f center,double angle){
Point2d preturn;
preturn.x = (inputpoint.x - center.x)*cos(-angle) - (inputpoint.y - center.y)*sin(-angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-angle) + (inputpoint.y - center.y)*cos(-angle)+center.y;
return preturn;
}
Point GetPointAfterRotate(Point inputpoint,Point center,double angle){
Point preturn;
preturn.x = (inputpoint.x - center.x)*cos(-1*angle) - (inputpoint.y - center.y)*sin(-1*angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-1*angle) + (inputpoint.y - center.y)*cos(-1*angle)+center.y;
return preturn;
}
double getOrientation(vector<Point> &pts, Point2f& pos,Mat& img)
{
//Construct a buffer used by the pca analysis
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//Perform PCA analysis
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//Store the position of the object
pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1));
//Store the eigenvalues and eigenvectors
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
int main( int argc, char** argv )
{
Mat img = imread("e:/sandbox/leaf.jpg");
pyrDown(img,img);
pyrDown(img,img);
Mat bw;
bool dRet;
cvtColor(img, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); ++i)
{
double area = contourArea(contours[i]);
if (area < 1e2 || 1e5 < area) continue;
Point2f* pos = new Point2f();
double dOrient = getOrientation(contours[i], *pos,img);
int xmin = 99999;
int xmax = 0;
int ymin = 99999;
int ymax = 0;
for (size_t j = 0;j<contours[i].size();j++)
{
contours[i][j] = GetPointAfterRotate(contours[i][j],(Point)*pos,dOrient);
if (contours[i][j].x < xmin)
xmin = contours[i][j].x;
if (contours[i][j].x > xmax)
xmax = contours[i][j].x;
if (contours[i][j].y < ymin)
ymin = contours[i][j].y;
if (contours[i][j].y > ymax)
ymax = contours[i][j].y;
}
Point lt = Point(xmin,ymin);
Point ld = Point(xmin,ymax);
Point rd = Point(xmax,ymax);
Point rt = Point(xmax,ymin);
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
lt = GetPointAfterRotate((Point)lt,(Point)*pos,-dOrient);
ld = GetPointAfterRotate((Point)ld,(Point)*pos,-dOrient);
rd = GetPointAfterRotate((Point)rd,(Point)*pos,-dOrient);
rt = GetPointAfterRotate((Point)rt,(Point)*pos,-dOrient);
line( img, lt, ld,Scalar(0,255,255),2);
line( img, lt, rt,Scalar(0,255,255),2);
line( img, rd, ld,Scalar(0,255,255),2);
line( img, rd, rt,Scalar(0,255,255),2);
}
return 0;
}
6、Is findContours fast enough ?
For current vision algorithms (e.g. object detection, object enhancing) does findCountours perform fast enough ? I've studied the algorithm behind it [1] and by a first look it's rather difficult to perform in parallel especially on SIMD units like GPUs. I took a usage example from [2] and did a simple trace of findCountours on [3] and [4]. While [3] requires 1ms, [4] requires about 40ms (AMD 5400K @3.6ghz). If high resolution video processing frame by frame is considered these results could be problematic. I think i may have an ideea for a faster algorithm oriented towards SIMD units. So i would like some feedback from people who have worked in vision problems to the question:
Is findCountours fast enough for current problems on current hardware ? Would improving it help in a significant way any specific algorithm ?
Thank you in advance,Grigor
[1] http://tpf-robotica.googlecode.com/svn-history/r397/trunk/Vision/papers/SA-CVGIP.PDF[2] http://docs.opencv.org/doc/tutorials/imgproc/shapedescriptors/find_contours/find_contours.html[3] http://jerome.berbiqui.org/eusipco2005/lena.png[4] http://www.lordkilgore.com/wordpress/wp-content/uploads/2010/12/big-maze.png
非常专业的提问,commit也非常有趣,注意下一行标红的部分,是object detection的state of art的方法。
I am wondering how object detection and findContours work together. I am working fulltime on object detection using the viola-jones cascade classification, the latentSVM of felzenszwalb and the dollar channelftrs framework which are all state of the art techniques and none of them need findContours ...
 StevenPuttemans (May 2 '14)
StevenPuttemans (May 2 '14)
It was more of an assumption than a confirmation. I previously worked on image vectorization (raster->vector, e.g. algorithm [1],[2]) and noticed that contour extraction was one of the problems on large scale images (such as maps). The question is actually more oriented towards "are there any problems that require fast contour extraction" or is there a scenario where "contour extraction is the slowest step" ? I think image vectorization is not enough for me to continue and invest time into this topic.
[1]http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_Ghuneim/intro.html[2] http://potrace.sourceforge.net/potrace.pdf
 glupescu (May 2 '14)
1
glupescu (May 2 '14)
1
So you want insight in the fact 'is it interesting to improve the findContours algorithm' ?
StevenPuttemans (May 2 '14)
1
Yes. I mean i have an idea how to make it faster but would like to write it for GPUs using OpenCL and that would take some time. And if i manage to improve it by a % margin why would anyone bother integrating it or checking it out if contour extraction itself isn't very used (assuming) hence the current OpenCV findCountour would be enough for most people.
glupescu (May 2 '14)
1
It is usefull in many other cases. I for example use it to detect blobs after an optimized segmentation. Increasing the blob detection process is always usefull.
StevenPuttemans (May 2 '14)
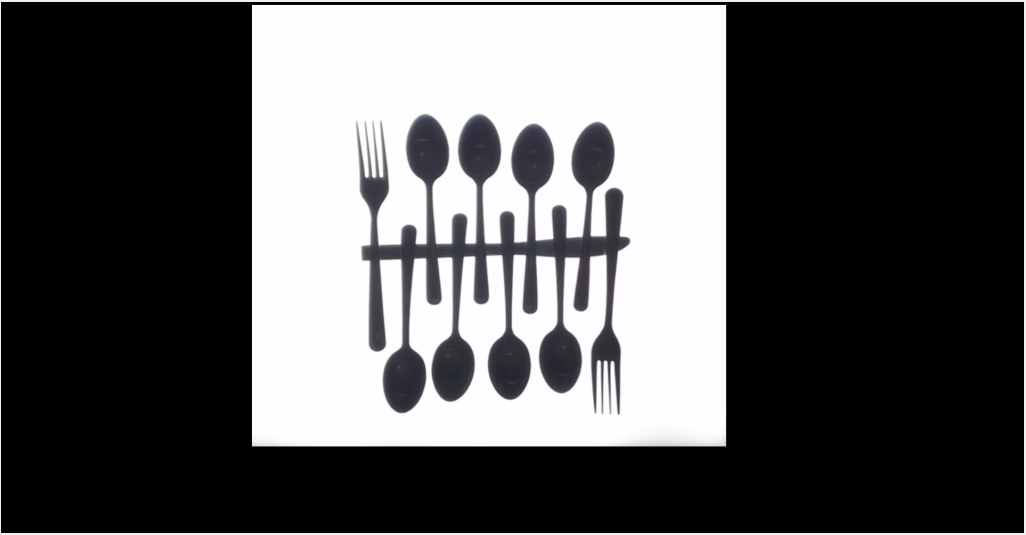
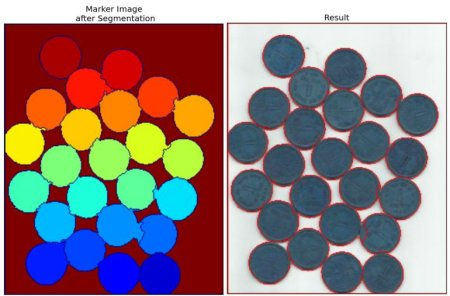
7、Circle detection,
I'm trying to find circles around the white disks (see example pictures below). The background is always darker than the foreground. The dots can sometimes be a bit damaged and therefore not of a full disk shape. Nevertheless I would like to fit circles as accurate as possible to the white disks. The found circles should all have a very similar radius (max. 5-10% difference). The circle detection should be focusing on determining the disks radius as accurate as possible.
What I tried so far: - Hough circle detection with various settings and preprocessing of the images - findContours
I was not able to produce satisfying results with these two algorithms. I guess it must have something to do how I preprocess the image but I have no idea where to start. Can anyone give me any advice for a setup that will solve this kind of problem?
Thank you very much in advance!
找圆是非常常见的问题。

https://docs.opencv.org/trunk/d3/db4/tutorial_py_watershed.html
这里的回答给出的漫水方法还是有一定借鉴价值的
Like @LBerger linked (but I do not really like links only responses) you should apply the following pipeline.
- Binarize your image, using for example OTSU thresholding
- Apply the distance transform to find the centers of all disk regions
- Use those to apply a watershed segmentation
It will give you a result, like described in the tutorial and should look something like this:
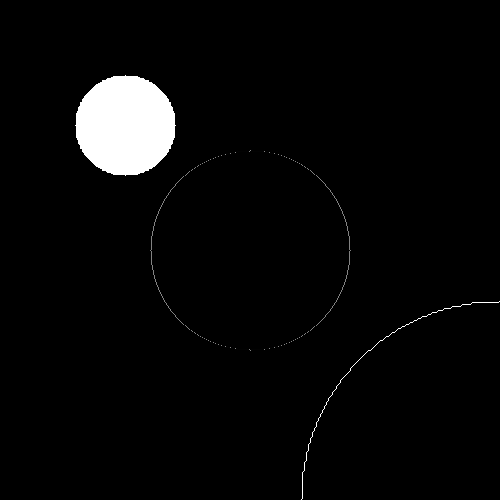
8、Can I resize a contour?
I have an application that detects an object by finding its contour. Because the image where I search for the object may be at a very big scale is affecting my detection because the contour can be too long and I skip the contours longer than a threshold. For fixing this, I have thought of resizing the image larger than a maximum size to that maw size. Doing so, I am detecting the object in the smaller image, and when drawing the contour on the initial image, I am getting a "wrong detection". Is there a possibility to resize the contour?
很有趣的思路,一般来说我会首先缩放图片,然后再去寻找新的contour,它这里所做的可能是为了满足特定需要的。
Nice, it is working, and it is working very nice. More, your idea of resizing the mask is introducing errors, because the cv::fillPoly is introducing errors (small "stairs") and resizing it is just making the errors to appear in the new contour, and they are even bigger.
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
int main( int argc, char** argv )
{
vector<vector<Point> > contours;
Mat img = Mat::zeros( 500, 500, CV_8UC1 );
circle( img, Point(250,250), 100, Scalar(255) );
findContours( img, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
fillConvexPoly( img, Mat( contours[0] ) / 2, Scalar(255)); // draws contour resized 1x/2
polylines( img, Mat( contours[0] ) * 2, true, Scalar(255)); // draws contour resized 2x
imshow("result",img);
waitKey();
return 0;
}
You can use the following method to resize the contour by keeping the contour center like the morphology operation.
void contourOffset(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, const cv::Point& offset) {
dst.clear();
dst.resize(src.size());
for (int j = 0; j < src.size(); j++)
dst[j] = src[j] + offset;
}
void scaleContour(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, float scale)
{
cv::Rect rct = cv::boundingRect(src);
std::vector<cv::Point> dc_contour;
cv::Point rct_offset(-rct.tl().x, -rct.tl().y);
contourOffset(src, dc_contour, rct_offset);
std::vector<cv::Point> dc_contour_scale(dc_contour.size());
for (int i = 0; i < dc_contour.size(); i++)
dc_contour_scale[i] = dc_contour[i] * scale;
cv::Rect rct_scale = cv::boundingRect(dc_contour_scale);
cv::Point offset((rct.width - rct_scale.width) / 2, (rct.height - rct_scale.height) / 2);
offset -= rct_offset;
dst.clear();
dst.resize(dc_contour_scale.size());
for (int i = 0; i < dc_contour_scale.size(); i++)
dst[i] = dc_contour_scale[i] + offset;
}
void scaleContours(const std::vector<std::vector<cv::Point>>& src, std::vector<std::vector<cv::Point>>& dst, float scale)
{
dst.clear();
dst.resize(src.size());
for (int i = 0; i < src.size(); i++)
scaleContour(src[i], dst[i], scale);
}
void main(){
std::vector<std::vector<cv::Point>> src,dst;
scaleContours(src,dst,0.95);
}
In the sample below, the green contour is main contour and the red contour is scaled contour with a coefficient of 0.95.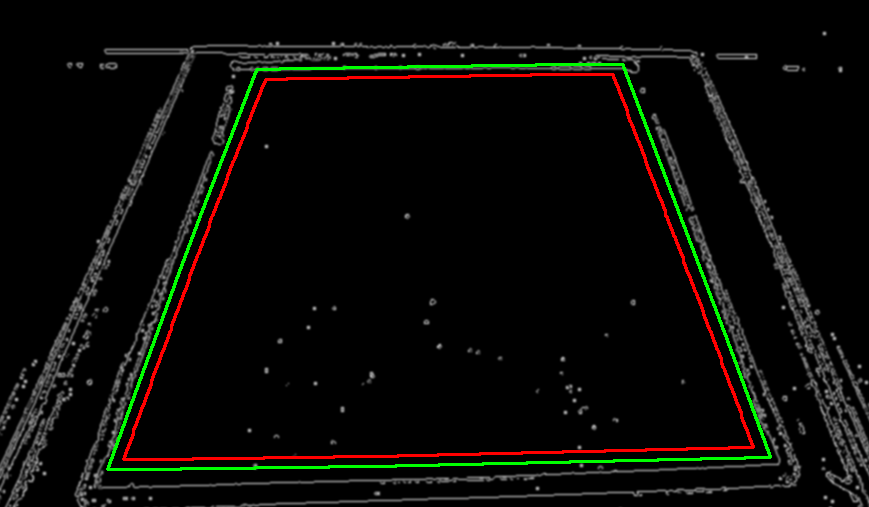
AnswerOpenCV(0826-0901)一周佳作欣赏的更多相关文章
- AnswerOpenCV(1001-1007)一周佳作欣赏
外国不过十一,所以利用十一假期,看看他们都在干什么. 一.小白问题 http://answers.opencv.org/question/199987/contour-single-blob-with ...
- AnswerOpenCV一周佳作欣赏(0615-0622)
一.How to make auto-adjustments(brightness and contrast) for image Android Opencv Image Correction i' ...
- (原创)古典主义——平凡之美 佳作欣赏(摄影,欣赏)
文中图片摘自腾讯文化网:www.cal.qq.com 1.Abstract 生活本就是平淡的,如同真理一般寂静.平时生活中不经意的瞬间,也有它本来的美丽.下面一组图是上上个世纪到上个世纪末一个 ...
- Python爬虫之抓取豆瓣影评数据
脚本功能: 1.访问豆瓣最受欢迎影评页面(http://movie.douban.com/review/best/?start=0),抓取所有影评数据中的标题.作者.影片以及影评信息 2.将抓取的信息 ...
- 2017年4月16日 一周AnswerOpenCV佳作赏析
2017年4月16日 一周AnswerOpenCV佳作赏析 1.HelloHow to smooth edge of text in binary image, based on threshold. ...
- 一个java实习生两周八次的面试经历
以前从来没有因为求职出去面试过,一直觉得面试很可怕,没想到最近两周我也成为了面霸,两周面试八次,我的找工作之路就这样开始了!大概两个星期之前,我看着自己在招聘网站上写好的简历连投出去的勇气都没有,战战 ...
- html5开发制作,漂亮html5模板欣赏,H5网站建设
html5是什么? HTML5 是下一代的 HTML(超文本标记语言,网页的组成部分),HTML5是web开发世界的一次重大的改变,能适配pc.手机等各终端,跨平台性能极强,移动互联网是未来的趋势,h ...
- mysql 按年度、季度、月度、周、日SQL统计查询
创建Table CREATE TABLE `test` ( `cdate` datetime DEFAULT NULL, `id` ) DEFAULT NULL, `name` ) DEFAULT N ...
- 0901~0907面试总结(腾讯CDC、金蝶)
纯脑记,但应该不会差太多 20150901腾讯CDC面试(初级外包岗) 0826的上午先用QQ进行了初步沟通,要求做一个不考虑AI的井字棋游戏,0830上午E-mail上交了做好的DEMO,然后等了几 ...
随机推荐
- cycript使用
cycript的原理是动态库注入,但是其动态库注入的原理,与我们常见的通过LC_LOAD_DYLIB在可执行文件中注入动态库不同. cycript的操作是 : 抓取到要挂载的应用, 由于越狱机上拥有权 ...
- pyqt常用窗口组件
扩展知识: 熟悉常用的窗口组件: 1 按钮类 QPushButton 普通按钮 QToolButton 工具按钮:通常在工具栏使用 QRadioButton 单选框 QCheckBox ...
- windows连接远程win服务器失败,win7win10都存在此问题,显示出现身份验证错误,要求的函数不受支持,可能由于CredSSP加密Oracle修正 (原)
之前电脑windows+mstsc连接另一个windows服务器正常登陆,可在更新本地系统为win10以后,登陆就出现了问题,提示的错误是,出现身份验证错误.要求的函数不受支持,可能由于CredSSP ...
- webpack使用三
Webpack的强大功能 生成Source Maps(使调试更容易) 开发总是离不开调试,方便的调试能极大的提高开发效率,不过有时候通过打包后的文件,你是不容易找到出错了的地方,对应的你写的代码的位置 ...
- Minecraft 1.8.9 FML Mod 开发教程
Mod开发教程 https://fmltutor.ustc-zzzz.net/
- selenium获取文本
# 标题list_title = driver.find_elements_by_xpath('//*[@id="share-content"]/div/div[1]/ul/li/ ...
- Visio 保存卡死解决办法
右键Visio图标 属性--兼容性--以兼容模式运行这个程序 要打上对勾 且下面的系统版本要选和你电脑版本一致的选项 特权等级 以管理员身份运行次程序 要打上对勾
- python中的IO操作
python中的基本IO操作: 1) 键盘输入函数:raw_input(string),不作处理的显示,与返回. input(string),可以接受一个python表达式作为返回,python内部得 ...
- Python全栈-day4-语法基础2
一.字符串 1.字符串基础 1)作用:用于描述姓名.性别.地址等信息 2)定义方式:单引号或者双引号以及三引号内添加字符 注:day3中介绍 name = 'zhang' user_name = &q ...
- python2.7之乱码问题
python 3之后当然不存在乱码问题了.python 2的乱码问题有时就有点头疼了.(代码均为在windows下测试) 示例:保存为test1.py 报错信息如下: 解决办法: 我将代码保存为tes ...
Hello everyone. I am just starting with OpenCV and still a bit lost.
Is OpenCV helpful to detect the position of a missing object (tooth for example)?
I would like to build a code to analyze an image of an equipment and detect which tooth is missing and its position.
For example in the image attached below of an equipment that has 9 teeth normally: the code should show a message that the 2nd tooth is missing.
Is this possible with OpenCV? If yes, where do I start?
Attached you will find the figure.
寻找这种类似齿轮的问题,可以在hull距的前提下,进行专门的处理。有兴趣可以继续研究,当然它这个图像质量比较差。
相关函数
convexityDefects
提供教程:https://docs.opencv.org/master/d5/d45/tutorial_py_contours_more_functions.html
2、Detect equipment in desired position
Hello everyone!
Is It possible to evaluate some pictures and save them Just when the object is in some desired position?
For example: monitoring a vídeo of an equipment that moves in and out of the scene. I would like to detect the time when the equipment is fully in the scene and then save It in a desired folder.
Thanks a Lot and have a great weekend
这个问题问的有点不清楚,也可能是非英语为母语的人提出的。实际上他想说明的、寻求的应该是一个MOG问题。
一旦项目由静态的图片提升到了动态的视频,在维度上面就有了提高,因此也会出现许多新的问题。
3、Does findContours create duplicates
Hi,I'm considering a binary image from which I extract its edges using cv::Canny. Consequently, I perform cv::findContours, storing all the contours points coordinates in a
vector < vector < Point > >
I noticed that the number of pixels (Points) in this structure is greater than the number of pixels I get by computing
vector<point> white_pixels;
findNonZero(silhouette, white_pixels);
on the same image.
Therefore I'm wondering if this happens because findContours includes duplicate points in its result or because findNonZero is less precise.
E.g. on a 200x200 sample image with the first method I get 1552 points while with the second I get 877.
In case the first hypothesis is correct, is there a way to either ignore the duplicates or remove them?
非常关键的一题,许多大神给出解答
a、
In case of a Canny edge image findContours will find most of the contour points twice, because the line width is only 1 and findContours is looking for closed contours.
To remove duplicates you can map the contour points to an empty (zero) image.For every contour point add 1 at the image position and only copy the contour point to your new contour vector if the value at this position is zero. That would be the easiest way I think.
Comments
Thanks! Actually, I did what you suggested using the same sample image and also counting how many pixels were set to 1 (without repetitions). I ended up with having exactly 877 white pixels in the new Mat::zeros image. At this point, i think the result I get by using "findNonZero" is correct, accurate and in this case more efficient since I can avoid the double for loop I used for mapping the contour points for this test.
b、My first answer was wrong. @matman answer is good but I think problem is in blurred image.
If you don't blur enough image you will have many double points. You shape become a line but at beginning your shape could be a rectangle.
if you find double point in your contour may be you have to increase blurring (shape like 8 could be a problem). For fractal shape (or with a large rugosity) it is difficult to delete those points.
In this example I use :surface rectangle 6 (width 3 and height 2)
canny witout blurring Image 0
canny with blur size 3 image 1
Canny with blur size 5 image 2
Source file
{
Mat x = Mat::zeros(20,20,CV_8UC1);
Mat result = Mat::zeros(20,20,CV_8UC3);
vector<Vec3b> c = { Vec3b(255, 0, 0), Vec3b(0,255,0),Vec3b(0,0,255),Vec3b(255, 255, 0),Vec3b(255, 0, 255),Vec3b(0, 255, 255) };
for (int i=9;i<=10;i++)
for (int j = 9; j <= 11; j++)
{
x.at<uchar>(i,j)=255;
result.at<Vec3b>(i,j)=Vec3b(255,255,255);
}
imwrite("square.png",x);
Mat idx;
findNonZero(x,idx);
cout << "Square surface " << idx.rows<<endl;
vector<vector<vector<Point> >> contours(3);
vector<Vec4i> hierarchy;
double thresh=1;
int aperture_size=3;
vector<Mat> xx(3);
vector<Mat> dst(3);
for (size_t i = 0; i < xx.size(); i++)
{
if (i==0)
xx[i]=x.clone();
else
blur(x, xx[i], Size(static_cast<int>(2*i+1),static_cast<int>(2*i+1)));
Canny(xx[i], dst[i],thresh, thresh, 3,true );
namedWindow(format("canny%d",i),WINDOW_NORMAL);
namedWindow(format("result%d",i),WINDOW_NORMAL);
imshow(format("canny%d",i),dst[i]);
findContours(dst[i],contours[i], hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
}
namedWindow("original image",WINDOW_NORMAL);
imshow("original image",x);
/*
Mat dx,dy,g;
Sobel(x, dx, CV_16S, 1, 0, aperture_size, 1, 0, BORDER_REPLICATE);
Sobel(x, dy, CV_16S, 0, 1, aperture_size, 1, 0, BORDER_REPLICATE);
namedWindow("gradient modulus",WINDOW_NORMAL);
g = dx.mul(dx) + dy.mul(dy);
imshow("gradient modulus",g);
findContours(x,contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
cout << "#contours : " << contours.size()<<endl;
if (contours.size() > 0)
{
for (size_t i = 0; i < contours.size(); i++)
{
cout << "#pixel in contour of original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[i].size();j++)
cout << contours[i][j] << "*";
cout<<endl;
drawContours(result, contours, i, c[i]);
}
}*/
size_t maxContour=0;
for (size_t k = 0; k < 3; k++)
{
cout << "#contours("<<k<<") : " << contours[k].size()<<endl;;
if (maxContour<contours[k].size())
maxContour= contours[k].size();
if (contours[k].size() > 0)
{
for (size_t i = 0; i<contours[k].size();i++)
{
cout << "#pixel in contour using canny with original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[k][i].size();j++)
cout << contours[k][i][j] << "*";
cout<<endl;
}
}
else
cout << "No contour found "<<endl;
}
int index=0;
while (true)
{
char key = (char)waitKey();
if( key == 27 )
break;
if (key == '+')
{
index = (index+1)%maxContour;
}
if (key == '-')
{
index = (index-1);
if (index<0)
index = maxContour-1;
}
vector<Mat> result(contours.size());
for (size_t k = 0; k < contours.size(); k++)
{
result[k] = Mat::zeros(20,20,CV_8UC3);
for (int ii=9;ii<=10;ii++)
for (int jj = 9; jj <= 11; jj++)
{
result[k].at<Vec3b>(ii,jj)=Vec3b(255,255,255);
}
if (index<contours[k].size())
drawContours(result[k], contours[k], static_cast<int>(index), c[index]);
else
cout << "No Contour "<<index<<" in image "<<k<<endl;
imshow(format("result%d",k),result[k]);
}
cout << "Contour "<<index<<endl;
}
exit(0);
}
但是对于今天的我来说,分析重复轮廓的意义在哪里了?很多时候,我都只是找最大的外围轮廓就可以的。
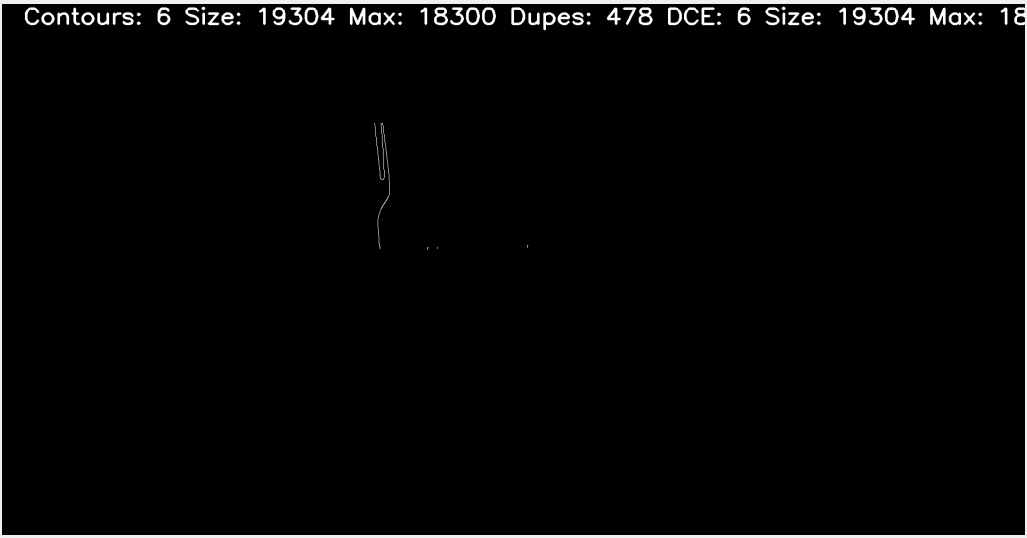
4、FindContours Duplicate Points
I am using OpenCV 3.4.1 with VS2015 C++ on a Win10 platform.
My question relates to findContours and whether that should be returning duplicate points within a contour.
For example, I have a test image like this:
I do Canny on it and then I run findContours like this:
findContours(this->MaskFrame,this->Contours,this->Hierarchy,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
When I check the resulting contours like this:
for (int x = 0; x < Images->Contours.size(); x++)
for (int y = 0; y < Images->Contours[x].size(); y++)
for (int z = y + 1; z < Images->Contours[x].size(); z++)
if (Images->Contours[x][y] == Images->Contours[x][z])
printf("Contours duplicate point: x: %d, y: %d z: %d\n", x, y, z);
I can see there there are many/hundreds of duplicate points within a given contour.
The presence of the duplicates seems to cause a problem with the drawContours function.
Nevertheless, this image shows that 6 contours were detected with ~19,000 points comprising all the contours, the largest contour has ~18,000 points, but there are 478 points that are duplicated within a contour.
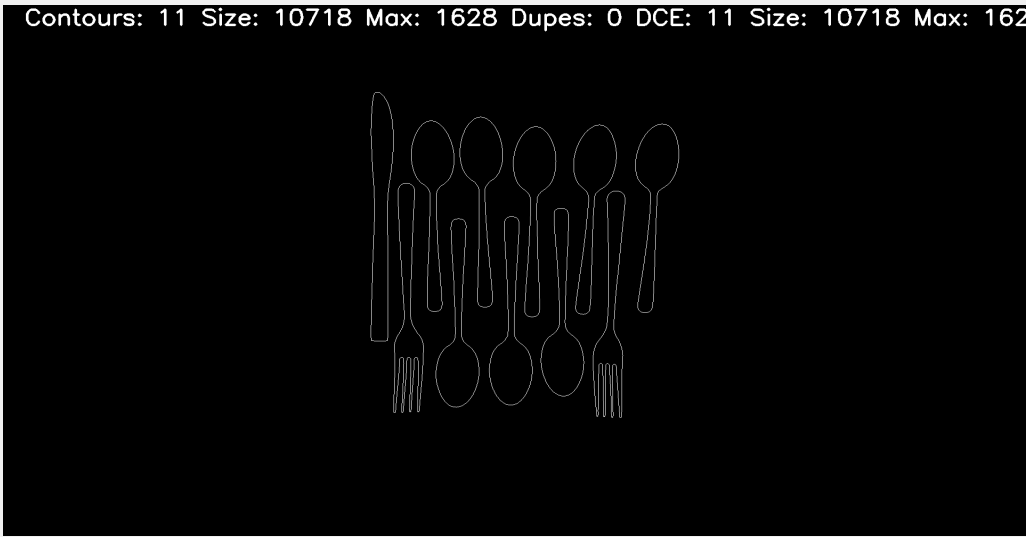
However, this only seems to occur if the total number of points in a given contour is fairly large, e.g., > 2000 points.If I arrange the image so that no contour has more than ~2000 points, as below, then there are no duplicates.
In this image, there are 11 contours, there are ~10,000 points comprising all the contours, with the largest contour having ~1,600 points, and no duplicates.
Before I try and get deep into findContours or something else, I thought I would ask: anyone have any ideas why I am seeing duplicate points within a contour?
Thanks for any help.
这里的具体运用,可能就是问题3的意义所在:通过轮廓分析来获得定量数据。
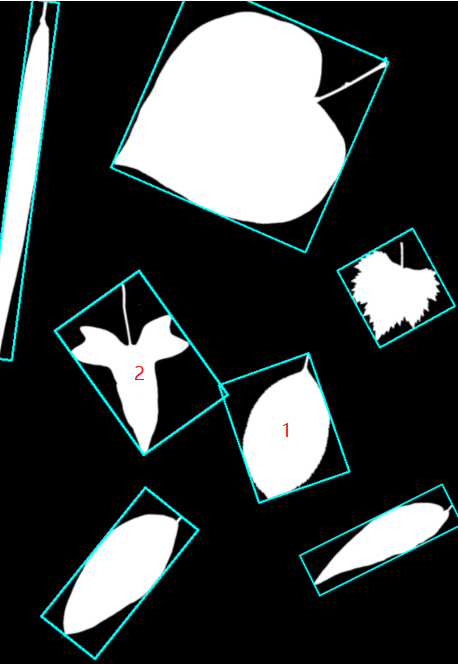
5、how to find the REAL width and height of contours
这道题目是我问的,而且也给出了最优回答,应该说是有价值的。
there is a image of 3 shapes
int main( int argc, char** argv )
{
//read the image
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (int i = 0;i<contours.size();i++)
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
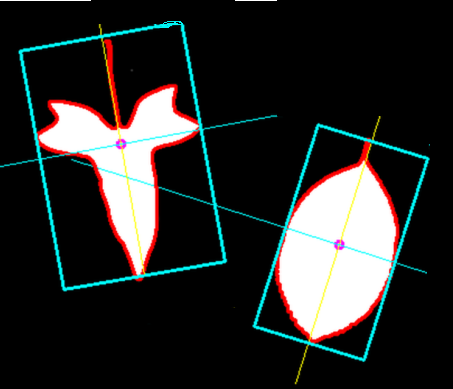
but ,in fact ,the contour 1 and contour 2 which i fingure out in RED do not get the right widht and height.
what i want should be this
i did't find the appropriate function or any Doc from Opencv to do this workIt's been bothering me for daysany help will be appreciate!
e
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
#define DEBUG FALSE
Point2f GetPointAfterRotate(Point2f inputpoint,Point2f center,double angle){
Point2d preturn;
preturn.x = (inputpoint.x - center.x)*cos(-angle) - (inputpoint.y - center.y)*sin(-angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-angle) + (inputpoint.y - center.y)*cos(-angle)+center.y;
return preturn;
}
Point GetPointAfterRotate(Point inputpoint,Point center,double angle){
Point preturn;
preturn.x = (inputpoint.x - center.x)*cos(-1*angle) - (inputpoint.y - center.y)*sin(-1*angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-1*angle) + (inputpoint.y - center.y)*cos(-1*angle)+center.y;
return preturn;
}
double getOrientation(vector<Point> &pts, Point2f& pos,Mat& img)
{
//Construct a buffer used by the pca analysis
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//Perform PCA analysis
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//Store the position of the object
pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1));
//Store the eigenvalues and eigenvectors
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
int main( int argc, char** argv )
{
Mat img = imread("e:/sandbox/leaf.jpg");
pyrDown(img,img);
pyrDown(img,img);
Mat bw;
bool dRet;
cvtColor(img, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); ++i)
{
double area = contourArea(contours[i]);
if (area < 1e2 || 1e5 < area) continue;
Point2f* pos = new Point2f();
double dOrient = getOrientation(contours[i], *pos,img);
int xmin = 99999;
int xmax = 0;
int ymin = 99999;
int ymax = 0;
for (size_t j = 0;j<contours[i].size();j++)
{
contours[i][j] = GetPointAfterRotate(contours[i][j],(Point)*pos,dOrient);
if (contours[i][j].x < xmin)
xmin = contours[i][j].x;
if (contours[i][j].x > xmax)
xmax = contours[i][j].x;
if (contours[i][j].y < ymin)
ymin = contours[i][j].y;
if (contours[i][j].y > ymax)
ymax = contours[i][j].y;
}
Point lt = Point(xmin,ymin);
Point ld = Point(xmin,ymax);
Point rd = Point(xmax,ymax);
Point rt = Point(xmax,ymin);
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
lt = GetPointAfterRotate((Point)lt,(Point)*pos,-dOrient);
ld = GetPointAfterRotate((Point)ld,(Point)*pos,-dOrient);
rd = GetPointAfterRotate((Point)rd,(Point)*pos,-dOrient);
rt = GetPointAfterRotate((Point)rt,(Point)*pos,-dOrient);
line( img, lt, ld,Scalar(0,255,255),2);
line( img, lt, rt,Scalar(0,255,255),2);
line( img, rd, ld,Scalar(0,255,255),2);
line( img, rd, rt,Scalar(0,255,255),2);
}
return 0;
}
6、Is findContours fast enough ?
For current vision algorithms (e.g. object detection, object enhancing) does findCountours perform fast enough ? I've studied the algorithm behind it [1] and by a first look it's rather difficult to perform in parallel especially on SIMD units like GPUs. I took a usage example from [2] and did a simple trace of findCountours on [3] and [4]. While [3] requires 1ms, [4] requires about 40ms (AMD 5400K @3.6ghz). If high resolution video processing frame by frame is considered these results could be problematic. I think i may have an ideea for a faster algorithm oriented towards SIMD units. So i would like some feedback from people who have worked in vision problems to the question:
Is findCountours fast enough for current problems on current hardware ? Would improving it help in a significant way any specific algorithm ?
Thank you in advance,Grigor
[1] http://tpf-robotica.googlecode.com/svn-history/r397/trunk/Vision/papers/SA-CVGIP.PDF[2] http://docs.opencv.org/doc/tutorials/imgproc/shapedescriptors/find_contours/find_contours.html[3] http://jerome.berbiqui.org/eusipco2005/lena.png[4] http://www.lordkilgore.com/wordpress/wp-content/uploads/2010/12/big-maze.png
非常专业的提问,commit也非常有趣,注意下一行标红的部分,是object detection的state of art的方法。
I am wondering how object detection and findContours work together. I am working fulltime on object detection using the viola-jones cascade classification, the latentSVM of felzenszwalb and the dollar channelftrs framework which are all state of the art techniques and none of them need findContours ...
StevenPuttemans (May 2 '14)
It was more of an assumption than a confirmation. I previously worked on image vectorization (raster->vector, e.g. algorithm [1],[2]) and noticed that contour extraction was one of the problems on large scale images (such as maps). The question is actually more oriented towards "are there any problems that require fast contour extraction" or is there a scenario where "contour extraction is the slowest step" ? I think image vectorization is not enough for me to continue and invest time into this topic.
[1]http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_Ghuneim/intro.html[2] http://potrace.sourceforge.net/potrace.pdf
glupescu (May 2 '14)
1
So you want insight in the fact 'is it interesting to improve the findContours algorithm' ?
StevenPuttemans (May 2 '14)
1
Yes. I mean i have an idea how to make it faster but would like to write it for GPUs using OpenCL and that would take some time. And if i manage to improve it by a % margin why would anyone bother integrating it or checking it out if contour extraction itself isn't very used (assuming) hence the current OpenCV findCountour would be enough for most people.
glupescu (May 2 '14)
1
It is usefull in many other cases. I for example use it to detect blobs after an optimized segmentation. Increasing the blob detection process is always usefull.
StevenPuttemans (May 2 '14)
7、Circle detection,
I'm trying to find circles around the white disks (see example pictures below). The background is always darker than the foreground. The dots can sometimes be a bit damaged and therefore not of a full disk shape. Nevertheless I would like to fit circles as accurate as possible to the white disks. The found circles should all have a very similar radius (max. 5-10% difference). The circle detection should be focusing on determining the disks radius as accurate as possible.
What I tried so far: - Hough circle detection with various settings and preprocessing of the images - findContours
I was not able to produce satisfying results with these two algorithms. I guess it must have something to do how I preprocess the image but I have no idea where to start. Can anyone give me any advice for a setup that will solve this kind of problem?
Thank you very much in advance!
找圆是非常常见的问题。
https://docs.opencv.org/trunk/d3/db4/tutorial_py_watershed.html
这里的回答给出的漫水方法还是有一定借鉴价值的
Like @LBerger linked (but I do not really like links only responses) you should apply the following pipeline.
- Binarize your image, using for example OTSU thresholding
- Apply the distance transform to find the centers of all disk regions
- Use those to apply a watershed segmentation
It will give you a result, like described in the tutorial and should look something like this:
8、Can I resize a contour?
I have an application that detects an object by finding its contour. Because the image where I search for the object may be at a very big scale is affecting my detection because the contour can be too long and I skip the contours longer than a threshold. For fixing this, I have thought of resizing the image larger than a maximum size to that maw size. Doing so, I am detecting the object in the smaller image, and when drawing the contour on the initial image, I am getting a "wrong detection". Is there a possibility to resize the contour?
很有趣的思路,一般来说我会首先缩放图片,然后再去寻找新的contour,它这里所做的可能是为了满足特定需要的。
Nice, it is working, and it is working very nice. More, your idea of resizing the mask is introducing errors, because the cv::fillPoly is introducing errors (small "stairs") and resizing it is just making the errors to appear in the new contour, and they are even bigger.
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
int main( int argc, char** argv )
{
vector<vector<Point> > contours;
Mat img = Mat::zeros( 500, 500, CV_8UC1 );
circle( img, Point(250,250), 100, Scalar(255) );
findContours( img, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
fillConvexPoly( img, Mat( contours[0] ) / 2, Scalar(255)); // draws contour resized 1x/2
polylines( img, Mat( contours[0] ) * 2, true, Scalar(255)); // draws contour resized 2x
imshow("result",img);
waitKey();
return 0;
}
You can use the following method to resize the contour by keeping the contour center like the morphology operation.
void contourOffset(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, const cv::Point& offset) {
dst.clear();
dst.resize(src.size());
for (int j = 0; j < src.size(); j++)
dst[j] = src[j] + offset;
}
void scaleContour(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, float scale)
{
cv::Rect rct = cv::boundingRect(src);
std::vector<cv::Point> dc_contour;
cv::Point rct_offset(-rct.tl().x, -rct.tl().y);
contourOffset(src, dc_contour, rct_offset);
std::vector<cv::Point> dc_contour_scale(dc_contour.size());
for (int i = 0; i < dc_contour.size(); i++)
dc_contour_scale[i] = dc_contour[i] * scale;
cv::Rect rct_scale = cv::boundingRect(dc_contour_scale);
cv::Point offset((rct.width - rct_scale.width) / 2, (rct.height - rct_scale.height) / 2);
offset -= rct_offset;
dst.clear();
dst.resize(dc_contour_scale.size());
for (int i = 0; i < dc_contour_scale.size(); i++)
dst[i] = dc_contour_scale[i] + offset;
}
void scaleContours(const std::vector<std::vector<cv::Point>>& src, std::vector<std::vector<cv::Point>>& dst, float scale)
{
dst.clear();
dst.resize(src.size());
for (int i = 0; i < src.size(); i++)
scaleContour(src[i], dst[i], scale);
}
void main(){
std::vector<std::vector<cv::Point>> src,dst;
scaleContours(src,dst,0.95);
}
In the sample below, the green contour is main contour and the red contour is scaled contour with a coefficient of 0.95.
Hello everyone!
Is It possible to evaluate some pictures and save them Just when the object is in some desired position?
For example: monitoring a vídeo of an equipment that moves in and out of the scene. I would like to detect the time when the equipment is fully in the scene and then save It in a desired folder.
Thanks a Lot and have a great weekend
这个问题问的有点不清楚,也可能是非英语为母语的人提出的。实际上他想说明的、寻求的应该是一个MOG问题。
一旦项目由静态的图片提升到了动态的视频,在维度上面就有了提高,因此也会出现许多新的问题。
3、Does findContours create duplicates
Hi,I'm considering a binary image from which I extract its edges using cv::Canny. Consequently, I perform cv::findContours, storing all the contours points coordinates in a
vector < vector < Point > >
I noticed that the number of pixels (Points) in this structure is greater than the number of pixels I get by computing
vector<point> white_pixels;
findNonZero(silhouette, white_pixels);
on the same image.
Therefore I'm wondering if this happens because findContours includes duplicate points in its result or because findNonZero is less precise.
E.g. on a 200x200 sample image with the first method I get 1552 points while with the second I get 877.
In case the first hypothesis is correct, is there a way to either ignore the duplicates or remove them?
非常关键的一题,许多大神给出解答
a、
In case of a Canny edge image findContours will find most of the contour points twice, because the line width is only 1 and findContours is looking for closed contours.
To remove duplicates you can map the contour points to an empty (zero) image.For every contour point add 1 at the image position and only copy the contour point to your new contour vector if the value at this position is zero. That would be the easiest way I think.
Comments
Thanks! Actually, I did what you suggested using the same sample image and also counting how many pixels were set to 1 (without repetitions). I ended up with having exactly 877 white pixels in the new Mat::zeros image. At this point, i think the result I get by using "findNonZero" is correct, accurate and in this case more efficient since I can avoid the double for loop I used for mapping the contour points for this test.
b、My first answer was wrong. @matman answer is good but I think problem is in blurred image.
If you don't blur enough image you will have many double points. You shape become a line but at beginning your shape could be a rectangle.
if you find double point in your contour may be you have to increase blurring (shape like 8 could be a problem). For fractal shape (or with a large rugosity) it is difficult to delete those points.
In this example I use :surface rectangle 6 (width 3 and height 2)
canny witout blurring Image 0
canny with blur size 3 image 1
Canny with blur size 5 image 2
Source file
{
Mat x = Mat::zeros(20,20,CV_8UC1);
Mat result = Mat::zeros(20,20,CV_8UC3);
vector<Vec3b> c = { Vec3b(255, 0, 0), Vec3b(0,255,0),Vec3b(0,0,255),Vec3b(255, 255, 0),Vec3b(255, 0, 255),Vec3b(0, 255, 255) };
for (int i=9;i<=10;i++)
for (int j = 9; j <= 11; j++)
{
x.at<uchar>(i,j)=255;
result.at<Vec3b>(i,j)=Vec3b(255,255,255);
}
imwrite("square.png",x);
Mat idx;
findNonZero(x,idx);
cout << "Square surface " << idx.rows<<endl;
vector<vector<vector<Point> >> contours(3);
vector<Vec4i> hierarchy;
double thresh=1;
int aperture_size=3;
vector<Mat> xx(3);
vector<Mat> dst(3);
for (size_t i = 0; i < xx.size(); i++)
{
if (i==0)
xx[i]=x.clone();
else
blur(x, xx[i], Size(static_cast<int>(2*i+1),static_cast<int>(2*i+1)));
Canny(xx[i], dst[i],thresh, thresh, 3,true );
namedWindow(format("canny%d",i),WINDOW_NORMAL);
namedWindow(format("result%d",i),WINDOW_NORMAL);
imshow(format("canny%d",i),dst[i]);
findContours(dst[i],contours[i], hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
}
namedWindow("original image",WINDOW_NORMAL);
imshow("original image",x);
/*
Mat dx,dy,g;
Sobel(x, dx, CV_16S, 1, 0, aperture_size, 1, 0, BORDER_REPLICATE);
Sobel(x, dy, CV_16S, 0, 1, aperture_size, 1, 0, BORDER_REPLICATE);
namedWindow("gradient modulus",WINDOW_NORMAL);
g = dx.mul(dx) + dy.mul(dy);
imshow("gradient modulus",g);
findContours(x,contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
cout << "#contours : " << contours.size()<<endl;
if (contours.size() > 0)
{
for (size_t i = 0; i < contours.size(); i++)
{
cout << "#pixel in contour of original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[i].size();j++)
cout << contours[i][j] << "*";
cout<<endl;
drawContours(result, contours, i, c[i]);
}
}*/
size_t maxContour=0;
for (size_t k = 0; k < 3; k++)
{
cout << "#contours("<<k<<") : " << contours[k].size()<<endl;;
if (maxContour<contours[k].size())
maxContour= contours[k].size();
if (contours[k].size() > 0)
{
for (size_t i = 0; i<contours[k].size();i++)
{
cout << "#pixel in contour using canny with original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[k][i].size();j++)
cout << contours[k][i][j] << "*";
cout<<endl;
}
}
else
cout << "No contour found "<<endl;
}
int index=0;
while (true)
{
char key = (char)waitKey();
if( key == 27 )
break;
if (key == '+')
{
index = (index+1)%maxContour;
}
if (key == '-')
{
index = (index-1);
if (index<0)
index = maxContour-1;
}
vector<Mat> result(contours.size());
for (size_t k = 0; k < contours.size(); k++)
{
result[k] = Mat::zeros(20,20,CV_8UC3);
for (int ii=9;ii<=10;ii++)
for (int jj = 9; jj <= 11; jj++)
{
result[k].at<Vec3b>(ii,jj)=Vec3b(255,255,255);
}
if (index<contours[k].size())
drawContours(result[k], contours[k], static_cast<int>(index), c[index]);
else
cout << "No Contour "<<index<<" in image "<<k<<endl;
imshow(format("result%d",k),result[k]);
}
cout << "Contour "<<index<<endl;
}
exit(0);
}
但是对于今天的我来说,分析重复轮廓的意义在哪里了?很多时候,我都只是找最大的外围轮廓就可以的。
4、FindContours Duplicate Points
I am using OpenCV 3.4.1 with VS2015 C++ on a Win10 platform.
My question relates to findContours and whether that should be returning duplicate points within a contour.
For example, I have a test image like this:
I do Canny on it and then I run findContours like this:
findContours(this->MaskFrame,this->Contours,this->Hierarchy,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
When I check the resulting contours like this:
for (int x = 0; x < Images->Contours.size(); x++)
for (int y = 0; y < Images->Contours[x].size(); y++)
for (int z = y + 1; z < Images->Contours[x].size(); z++)
if (Images->Contours[x][y] == Images->Contours[x][z])
printf("Contours duplicate point: x: %d, y: %d z: %d\n", x, y, z);
I can see there there are many/hundreds of duplicate points within a given contour.
The presence of the duplicates seems to cause a problem with the drawContours function.
Nevertheless, this image shows that 6 contours were detected with ~19,000 points comprising all the contours, the largest contour has ~18,000 points, but there are 478 points that are duplicated within a contour.
However, this only seems to occur if the total number of points in a given contour is fairly large, e.g., > 2000 points.If I arrange the image so that no contour has more than ~2000 points, as below, then there are no duplicates.
In this image, there are 11 contours, there are ~10,000 points comprising all the contours, with the largest contour having ~1,600 points, and no duplicates.
Before I try and get deep into findContours or something else, I thought I would ask: anyone have any ideas why I am seeing duplicate points within a contour?
Thanks for any help.
这里的具体运用,可能就是问题3的意义所在:通过轮廓分析来获得定量数据。
5、how to find the REAL width and height of contours
这道题目是我问的,而且也给出了最优回答,应该说是有价值的。
there is a image of 3 shapes
int main( int argc, char** argv )
{
//read the image
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (int i = 0;i<contours.size();i++)
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
but ,in fact ,the contour 1 and contour 2 which i fingure out in RED do not get the right widht and height.
what i want should be this
i did't find the appropriate function or any Doc from Opencv to do this workIt's been bothering me for daysany help will be appreciate!
e
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
#define DEBUG FALSE
Point2f GetPointAfterRotate(Point2f inputpoint,Point2f center,double angle){
Point2d preturn;
preturn.x = (inputpoint.x - center.x)*cos(-angle) - (inputpoint.y - center.y)*sin(-angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-angle) + (inputpoint.y - center.y)*cos(-angle)+center.y;
return preturn;
}
Point GetPointAfterRotate(Point inputpoint,Point center,double angle){
Point preturn;
preturn.x = (inputpoint.x - center.x)*cos(-1*angle) - (inputpoint.y - center.y)*sin(-1*angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-1*angle) + (inputpoint.y - center.y)*cos(-1*angle)+center.y;
return preturn;
}
double getOrientation(vector<Point> &pts, Point2f& pos,Mat& img)
{
//Construct a buffer used by the pca analysis
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//Perform PCA analysis
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//Store the position of the object
pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1));
//Store the eigenvalues and eigenvectors
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
int main( int argc, char** argv )
{
Mat img = imread("e:/sandbox/leaf.jpg");
pyrDown(img,img);
pyrDown(img,img);
Mat bw;
bool dRet;
cvtColor(img, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); ++i)
{
double area = contourArea(contours[i]);
if (area < 1e2 || 1e5 < area) continue;
Point2f* pos = new Point2f();
double dOrient = getOrientation(contours[i], *pos,img);
int xmin = 99999;
int xmax = 0;
int ymin = 99999;
int ymax = 0;
for (size_t j = 0;j<contours[i].size();j++)
{
contours[i][j] = GetPointAfterRotate(contours[i][j],(Point)*pos,dOrient);
if (contours[i][j].x < xmin)
xmin = contours[i][j].x;
if (contours[i][j].x > xmax)
xmax = contours[i][j].x;
if (contours[i][j].y < ymin)
ymin = contours[i][j].y;
if (contours[i][j].y > ymax)
ymax = contours[i][j].y;
}
Point lt = Point(xmin,ymin);
Point ld = Point(xmin,ymax);
Point rd = Point(xmax,ymax);
Point rt = Point(xmax,ymin);
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
lt = GetPointAfterRotate((Point)lt,(Point)*pos,-dOrient);
ld = GetPointAfterRotate((Point)ld,(Point)*pos,-dOrient);
rd = GetPointAfterRotate((Point)rd,(Point)*pos,-dOrient);
rt = GetPointAfterRotate((Point)rt,(Point)*pos,-dOrient);
line( img, lt, ld,Scalar(0,255,255),2);
line( img, lt, rt,Scalar(0,255,255),2);
line( img, rd, ld,Scalar(0,255,255),2);
line( img, rd, rt,Scalar(0,255,255),2);
}
return 0;
}
Hi,I'm considering a binary image from which I extract its edges using cv::Canny. Consequently, I perform cv::findContours, storing all the contours points coordinates in a
vector < vector < Point > >
I noticed that the number of pixels (Points) in this structure is greater than the number of pixels I get by computing
vector<point> white_pixels;
findNonZero(silhouette, white_pixels);
on the same image.
Therefore I'm wondering if this happens because findContours includes duplicate points in its result or because findNonZero is less precise.
E.g. on a 200x200 sample image with the first method I get 1552 points while with the second I get 877.
In case the first hypothesis is correct, is there a way to either ignore the duplicates or remove them?
非常关键的一题,许多大神给出解答
a、
In case of a Canny edge image findContours will find most of the contour points twice, because the line width is only 1 and findContours is looking for closed contours.
To remove duplicates you can map the contour points to an empty (zero) image.For every contour point add 1 at the image position and only copy the contour point to your new contour vector if the value at this position is zero. That would be the easiest way I think.
Comments
Thanks! Actually, I did what you suggested using the same sample image and also counting how many pixels were set to 1 (without repetitions). I ended up with having exactly 877 white pixels in the new Mat::zeros image. At this point, i think the result I get by using "findNonZero" is correct, accurate and in this case more efficient since I can avoid the double for loop I used for mapping the contour points for this test.
b、My first answer was wrong. @matman answer is good but I think problem is in blurred image.
If you don't blur enough image you will have many double points. You shape become a line but at beginning your shape could be a rectangle.
if you find double point in your contour may be you have to increase blurring (shape like 8 could be a problem). For fractal shape (or with a large rugosity) it is difficult to delete those points.
In this example I use :surface rectangle 6 (width 3 and height 2)
canny witout blurring Image 0
canny with blur size 3 image 1
Canny with blur size 5 image 2
Source file
{
Mat x = Mat::zeros(20,20,CV_8UC1);
Mat result = Mat::zeros(20,20,CV_8UC3);
vector<Vec3b> c = { Vec3b(255, 0, 0), Vec3b(0,255,0),Vec3b(0,0,255),Vec3b(255, 255, 0),Vec3b(255, 0, 255),Vec3b(0, 255, 255) };
for (int i=9;i<=10;i++)
for (int j = 9; j <= 11; j++)
{
x.at<uchar>(i,j)=255;
result.at<Vec3b>(i,j)=Vec3b(255,255,255);
}
imwrite("square.png",x);
Mat idx;
findNonZero(x,idx);
cout << "Square surface " << idx.rows<<endl;
vector<vector<vector<Point> >> contours(3);
vector<Vec4i> hierarchy;
double thresh=1;
int aperture_size=3;
vector<Mat> xx(3);
vector<Mat> dst(3);
for (size_t i = 0; i < xx.size(); i++)
{
if (i==0)
xx[i]=x.clone();
else
blur(x, xx[i], Size(static_cast<int>(2*i+1),static_cast<int>(2*i+1)));
Canny(xx[i], dst[i],thresh, thresh, 3,true );
namedWindow(format("canny%d",i),WINDOW_NORMAL);
namedWindow(format("result%d",i),WINDOW_NORMAL);
imshow(format("canny%d",i),dst[i]);
findContours(dst[i],contours[i], hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
}
namedWindow("original image",WINDOW_NORMAL);
imshow("original image",x);
/*
Mat dx,dy,g;
Sobel(x, dx, CV_16S, 1, 0, aperture_size, 1, 0, BORDER_REPLICATE);
Sobel(x, dy, CV_16S, 0, 1, aperture_size, 1, 0, BORDER_REPLICATE);
namedWindow("gradient modulus",WINDOW_NORMAL);
g = dx.mul(dx) + dy.mul(dy);
imshow("gradient modulus",g);
findContours(x,contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE, Point(0, 0));
cout << "#contours : " << contours.size()<<endl;
if (contours.size() > 0)
{
for (size_t i = 0; i < contours.size(); i++)
{
cout << "#pixel in contour of original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[i].size();j++)
cout << contours[i][j] << "*";
cout<<endl;
drawContours(result, contours, i, c[i]);
}
}*/
size_t maxContour=0;
for (size_t k = 0; k < 3; k++)
{
cout << "#contours("<<k<<") : " << contours[k].size()<<endl;;
if (maxContour<contours[k].size())
maxContour= contours[k].size();
if (contours[k].size() > 0)
{
for (size_t i = 0; i<contours[k].size();i++)
{
cout << "#pixel in contour using canny with original image :"<<contours[i].size()<<endl;
for (size_t j=0;j<contours[k][i].size();j++)
cout << contours[k][i][j] << "*";
cout<<endl;
}
}
else
cout << "No contour found "<<endl;
}
int index=0;
while (true)
{
char key = (char)waitKey();
if( key == 27 )
break;
if (key == '+')
{
index = (index+1)%maxContour;
}
if (key == '-')
{
index = (index-1);
if (index<0)
index = maxContour-1;
}
vector<Mat> result(contours.size());
for (size_t k = 0; k < contours.size(); k++)
{
result[k] = Mat::zeros(20,20,CV_8UC3);
for (int ii=9;ii<=10;ii++)
for (int jj = 9; jj <= 11; jj++)
{
result[k].at<Vec3b>(ii,jj)=Vec3b(255,255,255);
}
if (index<contours[k].size())
drawContours(result[k], contours[k], static_cast<int>(index), c[index]);
else
cout << "No Contour "<<index<<" in image "<<k<<endl;
imshow(format("result%d",k),result[k]);
}
cout << "Contour "<<index<<endl;
}
exit(0);
}
但是对于今天的我来说,分析重复轮廓的意义在哪里了?很多时候,我都只是找最大的外围轮廓就可以的。
4、FindContours Duplicate Points
I am using OpenCV 3.4.1 with VS2015 C++ on a Win10 platform.
My question relates to findContours and whether that should be returning duplicate points within a contour.
For example, I have a test image like this:
I do Canny on it and then I run findContours like this:
findContours(this->MaskFrame,this->Contours,this->Hierarchy,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
When I check the resulting contours like this:
for (int x = 0; x < Images->Contours.size(); x++)
for (int y = 0; y < Images->Contours[x].size(); y++)
for (int z = y + 1; z < Images->Contours[x].size(); z++)
if (Images->Contours[x][y] == Images->Contours[x][z])
printf("Contours duplicate point: x: %d, y: %d z: %d\n", x, y, z);
I can see there there are many/hundreds of duplicate points within a given contour.
The presence of the duplicates seems to cause a problem with the drawContours function.
Nevertheless, this image shows that 6 contours were detected with ~19,000 points comprising all the contours, the largest contour has ~18,000 points, but there are 478 points that are duplicated within a contour.
However, this only seems to occur if the total number of points in a given contour is fairly large, e.g., > 2000 points.If I arrange the image so that no contour has more than ~2000 points, as below, then there are no duplicates.
In this image, there are 11 contours, there are ~10,000 points comprising all the contours, with the largest contour having ~1,600 points, and no duplicates.
Before I try and get deep into findContours or something else, I thought I would ask: anyone have any ideas why I am seeing duplicate points within a contour?
Thanks for any help.
这里的具体运用,可能就是问题3的意义所在:通过轮廓分析来获得定量数据。
I am using OpenCV 3.4.1 with VS2015 C++ on a Win10 platform.
My question relates to findContours and whether that should be returning duplicate points within a contour.
For example, I have a test image like this:
I do Canny on it and then I run findContours like this:
findContours(this->MaskFrame,this->Contours,this->Hierarchy,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);When I check the resulting contours like this:
for (int x = 0; x < Images->Contours.size(); x++)
for (int y = 0; y < Images->Contours[x].size(); y++)
for (int z = y + 1; z < Images->Contours[x].size(); z++)
if (Images->Contours[x][y] == Images->Contours[x][z])
printf("Contours duplicate point: x: %d, y: %d z: %d\n", x, y, z);
I can see there there are many/hundreds of duplicate points within a given contour.
The presence of the duplicates seems to cause a problem with the drawContours function.
Nevertheless, this image shows that 6 contours were detected with ~19,000 points comprising all the contours, the largest contour has ~18,000 points, but there are 478 points that are duplicated within a contour.
However, this only seems to occur if the total number of points in a given contour is fairly large, e.g., > 2000 points.If I arrange the image so that no contour has more than ~2000 points, as below, then there are no duplicates.
In this image, there are 11 contours, there are ~10,000 points comprising all the contours, with the largest contour having ~1,600 points, and no duplicates.
Before I try and get deep into findContours or something else, I thought I would ask: anyone have any ideas why I am seeing duplicate points within a contour?
Thanks for any help.
5、how to find the REAL width and height of contours
这道题目是我问的,而且也给出了最优回答,应该说是有价值的。
there is a image of 3 shapes
int main( int argc, char** argv )
{
//read the image
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (int i = 0;i<contours.size();i++)
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
but ,in fact ,the contour 1 and contour 2 which i fingure out in RED do not get the right widht and height.
what i want should be this
i did't find the appropriate function or any Doc from Opencv to do this workIt's been bothering me for daysany help will be appreciate!
e
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
#define DEBUG FALSE
Point2f GetPointAfterRotate(Point2f inputpoint,Point2f center,double angle){
Point2d preturn;
preturn.x = (inputpoint.x - center.x)*cos(-angle) - (inputpoint.y - center.y)*sin(-angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-angle) + (inputpoint.y - center.y)*cos(-angle)+center.y;
return preturn;
}
Point GetPointAfterRotate(Point inputpoint,Point center,double angle){
Point preturn;
preturn.x = (inputpoint.x - center.x)*cos(-1*angle) - (inputpoint.y - center.y)*sin(-1*angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-1*angle) + (inputpoint.y - center.y)*cos(-1*angle)+center.y;
return preturn;
}
double getOrientation(vector<Point> &pts, Point2f& pos,Mat& img)
{
//Construct a buffer used by the pca analysis
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//Perform PCA analysis
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//Store the position of the object
pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1));
//Store the eigenvalues and eigenvectors
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
int main( int argc, char** argv )
{
Mat img = imread("e:/sandbox/leaf.jpg");
pyrDown(img,img);
pyrDown(img,img);
Mat bw;
bool dRet;
cvtColor(img, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); ++i)
{
double area = contourArea(contours[i]);
if (area < 1e2 || 1e5 < area) continue;
Point2f* pos = new Point2f();
double dOrient = getOrientation(contours[i], *pos,img);
int xmin = 99999;
int xmax = 0;
int ymin = 99999;
int ymax = 0;
for (size_t j = 0;j<contours[i].size();j++)
{
contours[i][j] = GetPointAfterRotate(contours[i][j],(Point)*pos,dOrient);
if (contours[i][j].x < xmin)
xmin = contours[i][j].x;
if (contours[i][j].x > xmax)
xmax = contours[i][j].x;
if (contours[i][j].y < ymin)
ymin = contours[i][j].y;
if (contours[i][j].y > ymax)
ymax = contours[i][j].y;
}
Point lt = Point(xmin,ymin);
Point ld = Point(xmin,ymax);
Point rd = Point(xmax,ymax);
Point rt = Point(xmax,ymin);
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
lt = GetPointAfterRotate((Point)lt,(Point)*pos,-dOrient);
ld = GetPointAfterRotate((Point)ld,(Point)*pos,-dOrient);
rd = GetPointAfterRotate((Point)rd,(Point)*pos,-dOrient);
rt = GetPointAfterRotate((Point)rt,(Point)*pos,-dOrient);
line( img, lt, ld,Scalar(0,255,255),2);
line( img, lt, rt,Scalar(0,255,255),2);
line( img, rd, ld,Scalar(0,255,255),2);
line( img, rd, rt,Scalar(0,255,255),2);
}
return 0;
}
there is a image of 3 shapes
{
//read the image
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (int i = 0;i<contours.size();i++)
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
but ,in fact ,the contour 1 and contour 2 which i fingure out in RED do not get the right widht and height.
what i want should be this
i did't find the appropriate function or any Doc from Opencv to do this workIt's been bothering me for daysany help will be appreciate!
e
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
#define DEBUG FALSE
Point2f GetPointAfterRotate(Point2f inputpoint,Point2f center,double angle){
Point2d preturn;
preturn.x = (inputpoint.x - center.x)*cos(-angle) - (inputpoint.y - center.y)*sin(-angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-angle) + (inputpoint.y - center.y)*cos(-angle)+center.y;
return preturn;
}
Point GetPointAfterRotate(Point inputpoint,Point center,double angle){
Point preturn;
preturn.x = (inputpoint.x - center.x)*cos(-1*angle) - (inputpoint.y - center.y)*sin(-1*angle)+center.x;
preturn.y = (inputpoint.x - center.x)*sin(-1*angle) + (inputpoint.y - center.y)*cos(-1*angle)+center.y;
return preturn;
}
double getOrientation(vector<Point> &pts, Point2f& pos,Mat& img)
{
//Construct a buffer used by the pca analysis
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//Perform PCA analysis
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//Store the position of the object
pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1));
//Store the eigenvalues and eigenvectors
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
int main( int argc, char** argv )
{
Mat img = imread("e:/sandbox/leaf.jpg");
pyrDown(img,img);
pyrDown(img,img);
Mat bw;
bool dRet;
cvtColor(img, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); ++i)
{
double area = contourArea(contours[i]);
if (area < 1e2 || 1e5 < area) continue;
Point2f* pos = new Point2f();
double dOrient = getOrientation(contours[i], *pos,img);
int xmin = 99999;
int xmax = 0;
int ymin = 99999;
int ymax = 0;
for (size_t j = 0;j<contours[i].size();j++)
{
contours[i][j] = GetPointAfterRotate(contours[i][j],(Point)*pos,dOrient);
if (contours[i][j].x < xmin)
xmin = contours[i][j].x;
if (contours[i][j].x > xmax)
xmax = contours[i][j].x;
if (contours[i][j].y < ymin)
ymin = contours[i][j].y;
if (contours[i][j].y > ymax)
ymax = contours[i][j].y;
}
Point lt = Point(xmin,ymin);
Point ld = Point(xmin,ymax);
Point rd = Point(xmax,ymax);
Point rt = Point(xmax,ymin);
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
lt = GetPointAfterRotate((Point)lt,(Point)*pos,-dOrient);
ld = GetPointAfterRotate((Point)ld,(Point)*pos,-dOrient);
rd = GetPointAfterRotate((Point)rd,(Point)*pos,-dOrient);
rt = GetPointAfterRotate((Point)rt,(Point)*pos,-dOrient);
line( img, lt, ld,Scalar(0,255,255),2);
line( img, lt, rt,Scalar(0,255,255),2);
line( img, rd, ld,Scalar(0,255,255),2);
line( img, rd, rt,Scalar(0,255,255),2);
}
return 0;
}
6、Is findContours fast enough ?
For current vision algorithms (e.g. object detection, object enhancing) does findCountours perform fast enough ? I've studied the algorithm behind it [1] and by a first look it's rather difficult to perform in parallel especially on SIMD units like GPUs. I took a usage example from [2] and did a simple trace of findCountours on [3] and [4]. While [3] requires 1ms, [4] requires about 40ms (AMD 5400K @3.6ghz). If high resolution video processing frame by frame is considered these results could be problematic. I think i may have an ideea for a faster algorithm oriented towards SIMD units. So i would like some feedback from people who have worked in vision problems to the question:
Is findCountours fast enough for current problems on current hardware ? Would improving it help in a significant way any specific algorithm ?
Thank you in advance,Grigor
[1] http://tpf-robotica.googlecode.com/svn-history/r397/trunk/Vision/papers/SA-CVGIP.PDF[2] http://docs.opencv.org/doc/tutorials/imgproc/shapedescriptors/find_contours/find_contours.html[3] http://jerome.berbiqui.org/eusipco2005/lena.png[4] http://www.lordkilgore.com/wordpress/wp-content/uploads/2010/12/big-maze.png
非常专业的提问,commit也非常有趣,注意下一行标红的部分,是object detection的state of art的方法。
For current vision algorithms (e.g. object detection, object enhancing) does findCountours perform fast enough ? I've studied the algorithm behind it [1] and by a first look it's rather difficult to perform in parallel especially on SIMD units like GPUs. I took a usage example from [2] and did a simple trace of findCountours on [3] and [4]. While [3] requires 1ms, [4] requires about 40ms (AMD 5400K @3.6ghz). If high resolution video processing frame by frame is considered these results could be problematic. I think i may have an ideea for a faster algorithm oriented towards SIMD units. So i would like some feedback from people who have worked in vision problems to the question:
Is findCountours fast enough for current problems on current hardware ? Would improving it help in a significant way any specific algorithm ?
Thank you in advance,Grigor
[1] http://tpf-robotica.googlecode.com/svn-history/r397/trunk/Vision/papers/SA-CVGIP.PDF[2] http://docs.opencv.org/doc/tutorials/imgproc/shapedescriptors/find_contours/find_contours.html[3] http://jerome.berbiqui.org/eusipco2005/lena.png[4] http://www.lordkilgore.com/wordpress/wp-content/uploads/2010/12/big-maze.png
{kind=link}
{kind=link}
非常专业的提问,commit也非常有趣,注意下一行标红的部分,是object detection的state of art的方法。
I am wondering how object detection and findContours work together. I am working fulltime on object detection using the viola-jones cascade classification, the latentSVM of felzenszwalb and the dollar channelftrs framework which are all state of the art techniques and none of them need findContours ...
StevenPuttemans (May 2 '14)It was more of an assumption than a confirmation. I previously worked on image vectorization (raster->vector, e.g. algorithm [1],[2]) and noticed that contour extraction was one of the problems on large scale images (such as maps). The question is actually more oriented towards "are there any problems that require fast contour extraction" or is there a scenario where "contour extraction is the slowest step" ? I think image vectorization is not enough for me to continue and invest time into this topic.
[1]http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_Ghuneim/intro.html[2] http://potrace.sourceforge.net/potrace.pdf
glupescu (May 2 '14)So you want insight in the fact 'is it interesting to improve the findContours algorithm' ?
StevenPuttemans (May 2 '14)Yes. I mean i have an idea how to make it faster but would like to write it for GPUs using OpenCL and that would take some time. And if i manage to improve it by a % margin why would anyone bother integrating it or checking it out if contour extraction itself isn't very used (assuming) hence the current OpenCV findCountour would be enough for most people.
glupescu (May 2 '14)It is usefull in many other cases. I for example use it to detect blobs after an optimized segmentation. Increasing the blob detection process is always usefull.
StevenPuttemans (May 2 '14)7、Circle detection,
I'm trying to find circles around the white disks (see example pictures below). The background is always darker than the foreground. The dots can sometimes be a bit damaged and therefore not of a full disk shape. Nevertheless I would like to fit circles as accurate as possible to the white disks. The found circles should all have a very similar radius (max. 5-10% difference). The circle detection should be focusing on determining the disks radius as accurate as possible.
What I tried so far: - Hough circle detection with various settings and preprocessing of the images - findContours
I was not able to produce satisfying results with these two algorithms. I guess it must have something to do how I preprocess the image but I have no idea where to start. Can anyone give me any advice for a setup that will solve this kind of problem?
Thank you very much in advance!
I'm trying to find circles around the white disks (see example pictures below). The background is always darker than the foreground. The dots can sometimes be a bit damaged and therefore not of a full disk shape. Nevertheless I would like to fit circles as accurate as possible to the white disks. The found circles should all have a very similar radius (max. 5-10% difference). The circle detection should be focusing on determining the disks radius as accurate as possible.
What I tried so far: - Hough circle detection with various settings and preprocessing of the images - findContours
I was not able to produce satisfying results with these two algorithms. I guess it must have something to do how I preprocess the image but I have no idea where to start. Can anyone give me any advice for a setup that will solve this kind of problem?
Thank you very much in advance!
找圆是非常常见的问题。
https://docs.opencv.org/trunk/d3/db4/tutorial_py_watershed.html
这里的回答给出的漫水方法还是有一定借鉴价值的
Like @LBerger linked (but I do not really like links only responses) you should apply the following pipeline.
- Binarize your image, using for example OTSU thresholding
- Apply the distance transform to find the centers of all disk regions
- Use those to apply a watershed segmentation
It will give you a result, like described in the tutorial and should look something like this:
8、Can I resize a contour?
I have an application that detects an object by finding its contour. Because the image where I search for the object may be at a very big scale is affecting my detection because the contour can be too long and I skip the contours longer than a threshold. For fixing this, I have thought of resizing the image larger than a maximum size to that maw size. Doing so, I am detecting the object in the smaller image, and when drawing the contour on the initial image, I am getting a "wrong detection". Is there a possibility to resize the contour?
很有趣的思路,一般来说我会首先缩放图片,然后再去寻找新的contour,它这里所做的可能是为了满足特定需要的。
Nice, it is working, and it is working very nice. More, your idea of resizing the mask is introducing errors, because the cv::fillPoly is introducing errors (small "stairs") and resizing it is just making the errors to appear in the new contour, and they are even bigger.
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
int main( int argc, char** argv )
{
vector<vector<Point> > contours;
Mat img = Mat::zeros( 500, 500, CV_8UC1 );
circle( img, Point(250,250), 100, Scalar(255) );
findContours( img, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
fillConvexPoly( img, Mat( contours[0] ) / 2, Scalar(255)); // draws contour resized 1x/2
polylines( img, Mat( contours[0] ) * 2, true, Scalar(255)); // draws contour resized 2x
imshow("result",img);
waitKey();
return 0;
}
You can use the following method to resize the contour by keeping the contour center like the morphology operation.
void contourOffset(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, const cv::Point& offset) {
dst.clear();
dst.resize(src.size());
for (int j = 0; j < src.size(); j++)
dst[j] = src[j] + offset;
}
void scaleContour(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, float scale)
{
cv::Rect rct = cv::boundingRect(src);
std::vector<cv::Point> dc_contour;
cv::Point rct_offset(-rct.tl().x, -rct.tl().y);
contourOffset(src, dc_contour, rct_offset);
std::vector<cv::Point> dc_contour_scale(dc_contour.size());
for (int i = 0; i < dc_contour.size(); i++)
dc_contour_scale[i] = dc_contour[i] * scale;
cv::Rect rct_scale = cv::boundingRect(dc_contour_scale);
cv::Point offset((rct.width - rct_scale.width) / 2, (rct.height - rct_scale.height) / 2);
offset -= rct_offset;
dst.clear();
dst.resize(dc_contour_scale.size());
for (int i = 0; i < dc_contour_scale.size(); i++)
dst[i] = dc_contour_scale[i] + offset;
}
void scaleContours(const std::vector<std::vector<cv::Point>>& src, std::vector<std::vector<cv::Point>>& dst, float scale)
{
dst.clear();
dst.resize(src.size());
for (int i = 0; i < src.size(); i++)
scaleContour(src[i], dst[i], scale);
}
void main(){
std::vector<std::vector<cv::Point>> src,dst;
scaleContours(src,dst,0.95);
}
I have an application that detects an object by finding its contour. Because the image where I search for the object may be at a very big scale is affecting my detection because the contour can be too long and I skip the contours longer than a threshold. For fixing this, I have thought of resizing the image larger than a maximum size to that maw size. Doing so, I am detecting the object in the smaller image, and when drawing the contour on the initial image, I am getting a "wrong detection". Is there a possibility to resize the contour?
很有趣的思路,一般来说我会首先缩放图片,然后再去寻找新的contour,它这里所做的可能是为了满足特定需要的。
Nice, it is working, and it is working very nice. More, your idea of resizing the mask is introducing errors, because the cv::fillPoly is introducing errors (small "stairs") and resizing it is just making the errors to appear in the new contour, and they are even bigger.
#include "opencv2/highgui.hpp"
using namespace cv;
int main( int argc, char** argv )
{
vector<vector<Point> > contours;
Mat img = Mat::zeros( 500, 500, CV_8UC1 );
circle( img, Point(250,250), 100, Scalar(255) );
findContours( img, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
fillConvexPoly( img, Mat( contours[0] ) / 2, Scalar(255)); // draws contour resized 1x/2
polylines( img, Mat( contours[0] ) * 2, true, Scalar(255)); // draws contour resized 2x
imshow("result",img);
waitKey();
return 0;
}
void contourOffset(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, const cv::Point& offset) {
dst.clear();
dst.resize(src.size());
for (int j = 0; j < src.size(); j++)
dst[j] = src[j] + offset;
}
void scaleContour(const std::vector<cv::Point>& src, std::vector<cv::Point>& dst, float scale)
{
cv::Rect rct = cv::boundingRect(src);
std::vector<cv::Point> dc_contour;
cv::Point rct_offset(-rct.tl().x, -rct.tl().y);
contourOffset(src, dc_contour, rct_offset);
std::vector<cv::Point> dc_contour_scale(dc_contour.size());
for (int i = 0; i < dc_contour.size(); i++)
dc_contour_scale[i] = dc_contour[i] * scale;
cv::Rect rct_scale = cv::boundingRect(dc_contour_scale);
cv::Point offset((rct.width - rct_scale.width) / 2, (rct.height - rct_scale.height) / 2);
offset -= rct_offset;
dst.clear();
dst.resize(dc_contour_scale.size());
for (int i = 0; i < dc_contour_scale.size(); i++)
dst[i] = dc_contour_scale[i] + offset;
}
void scaleContours(const std::vector<std::vector<cv::Point>>& src, std::vector<std::vector<cv::Point>>& dst, float scale)
{
dst.clear();
dst.resize(src.size());
for (int i = 0; i < src.size(); i++)
scaleContour(src[i], dst[i], scale);
}
void main(){
std::vector<std::vector<cv::Point>> src,dst;
scaleContours(src,dst,0.95);
}
In the sample below, the green contour is main contour and the red contour is scaled contour with a coefficient of 0.95.
外国不过十一,所以利用十一假期,看看他们都在干什么. 一.小白问题 http://answers.opencv.org/question/199987/contour-single-blob-with ...
一.How to make auto-adjustments(brightness and contrast) for image Android Opencv Image Correction i' ...
文中图片摘自腾讯文化网:www.cal.qq.com 1.Abstract 生活本就是平淡的,如同真理一般寂静.平时生活中不经意的瞬间,也有它本来的美丽.下面一组图是上上个世纪到上个世纪末一个 ...
脚本功能: 1.访问豆瓣最受欢迎影评页面(http://movie.douban.com/review/best/?start=0),抓取所有影评数据中的标题.作者.影片以及影评信息 2.将抓取的信息 ...
2017年4月16日 一周AnswerOpenCV佳作赏析 1.HelloHow to smooth edge of text in binary image, based on threshold. ...
以前从来没有因为求职出去面试过,一直觉得面试很可怕,没想到最近两周我也成为了面霸,两周面试八次,我的找工作之路就这样开始了!大概两个星期之前,我看着自己在招聘网站上写好的简历连投出去的勇气都没有,战战 ...
html5是什么? HTML5 是下一代的 HTML(超文本标记语言,网页的组成部分),HTML5是web开发世界的一次重大的改变,能适配pc.手机等各终端,跨平台性能极强,移动互联网是未来的趋势,h ...
创建Table CREATE TABLE `test` ( `cdate` datetime DEFAULT NULL, `id` ) DEFAULT NULL, `name` ) DEFAULT N ...
纯脑记,但应该不会差太多 20150901腾讯CDC面试(初级外包岗) 0826的上午先用QQ进行了初步沟通,要求做一个不考虑AI的井字棋游戏,0830上午E-mail上交了做好的DEMO,然后等了几 ...
cycript的原理是动态库注入,但是其动态库注入的原理,与我们常见的通过LC_LOAD_DYLIB在可执行文件中注入动态库不同. cycript的操作是 : 抓取到要挂载的应用, 由于越狱机上拥有权 ...
扩展知识: 熟悉常用的窗口组件: 1 按钮类 QPushButton 普通按钮 QToolButton 工具按钮:通常在工具栏使用 QRadioButton 单选框 QCheckBox ...
之前电脑windows+mstsc连接另一个windows服务器正常登陆,可在更新本地系统为win10以后,登陆就出现了问题,提示的错误是,出现身份验证错误.要求的函数不受支持,可能由于CredSSP ...
Webpack的强大功能 生成Source Maps(使调试更容易) 开发总是离不开调试,方便的调试能极大的提高开发效率,不过有时候通过打包后的文件,你是不容易找到出错了的地方,对应的你写的代码的位置 ...
Mod开发教程 https://fmltutor.ustc-zzzz.net/
# 标题list_title = driver.find_elements_by_xpath('//*[@id="share-content"]/div/div[1]/ul/li/ ...
右键Visio图标 属性--兼容性--以兼容模式运行这个程序 要打上对勾 且下面的系统版本要选和你电脑版本一致的选项 特权等级 以管理员身份运行次程序 要打上对勾
python中的基本IO操作: 1) 键盘输入函数:raw_input(string),不作处理的显示,与返回. input(string),可以接受一个python表达式作为返回,python内部得 ...
一.字符串 1.字符串基础 1)作用:用于描述姓名.性别.地址等信息 2)定义方式:单引号或者双引号以及三引号内添加字符 注:day3中介绍 name = 'zhang' user_name = &q ...
python 3之后当然不存在乱码问题了.python 2的乱码问题有时就有点头疼了.(代码均为在windows下测试) 示例:保存为test1.py 报错信息如下: 解决办法: 我将代码保存为tes ...