Building Particle Filters and Particle MCMC in NIMBLE
This example shows how to construct and conduct inference on a state space model using particle filtering algorithms. nimblecurrently has versions of the bootstrap filter, the auxiliary particle filter, the ensemble Kalman filter, and the Liu and West filter implemented. Additionally, particle MCMC samplers are available and can be specified for both univariate and multivariate parameters.
Model Creation

## load the nimble library and set seed
library('nimble')
set.seed(1) ## define the model
stateSpaceCode <- nimbleCode({
a ~ dunif(-0.9999, 0.9999)
b ~ dnorm(0, sd = 1000)
sigPN ~ dunif(1e-04, 1)
sigOE ~ dunif(1e-04, 1)
x[1] ~ dnorm(b/(1 - a), sd = sigPN/sqrt((1-a*a)))
y[1] ~ dt(mu = x[1], sigma = sigOE, df = 5)
for (i in 2:t) {
x[i] ~ dnorm(a * x[i - 1] + b, sd = sigPN)
y[i] ~ dt(mu = x[i], sigma = sigOE, df = 5)
}
}) ## define data, constants, and initial values
data <- list(
y = c(0.213, 1.025, 0.314, 0.521, 0.895, 1.74, 0.078, 0.474, 0.656, 0.802)
)
constants <- list(
t = 10
)
inits <- list(
a = 0,
b = .5,
sigPN = .1,
sigOE = .05
) ## build the model
stateSpaceModel <- nimbleModel(stateSpaceCode,
data = data,
constants = constants,
inits = inits,
check = FALSE)
## defining model...
## building model...
## setting data and initial values...
## running calculate on model (any error reports that follow may simply
## reflect missing values in model variables) ...
##
## checking model sizes and dimensions...
## note that missing values (NAs) or non-finite values were found in model
## variables: x, lifted_a_times_x_oBi_minus_1_cB_plus_b. This is not an error,
## but some or all variables may need to be initialized for certain algorithms
## to operate properly.
##
## model building finished.
Construct and run a bootstrap filter
We next construct a bootstrap filter to conduct inference on the latent states of our state space model. Note that the bootstrap filter, along with the auxiliary particle filter and the ensemble Kalman filter, treat the top-level parameters a, b, sigPN, and sigOEas fixed. Therefore, the bootstrap filter below will proceed as though a = 0, b = .5, sigPN = .1, and sigOE = .05, which are the initial values that were assigned to the top-level parameters.
The bootstrap filter takes as arguments the name of the model and the name of the latent state variable within the model. The filter can also take a control list that can be used to fine-tune the algorithm’s configuration.
## build bootstrap filter and compile model and filter
bootstrapFilter <- buildBootstrapFilter(stateSpaceModel, nodes = 'x')
compiledList <- compileNimble(stateSpaceModel, bootstrapFilter)
## compiling... this may take a minute. Use 'showCompilerOutput = TRUE' to see C++ compiler details.
## compilation finished.
## run compiled filter with 10,000 particles.
## note that the bootstrap filter returns an estimate of the log-likelihood of the model.
compiledList$bootstrapFilter$run(10000)
## [1] -28.13009
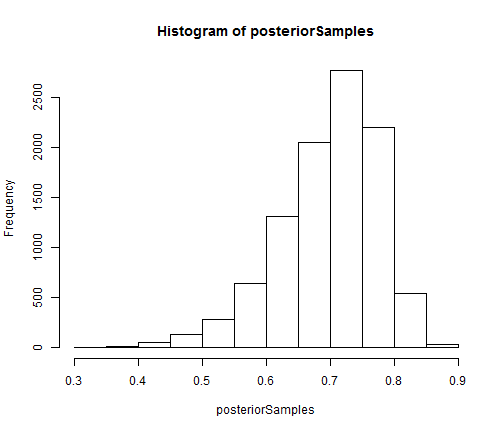
Particle filtering algorithms in nimble store weighted samples of the filtering distribution of the latent states in the mvSamplesmodelValues object. Equally weighted samples are stored in the mvEWSamples object. By default, nimble only stores samples from the final time point.
## extract equally weighted posterior samples of x[10] and create a histogram
posteriorSamples <- as.matrix(compiledList$bootstrapFilter$mvEWSamples)
hist(posteriorSamples)
The auxiliary particle filter and ensemble Kalman filter can be constructed and run in the same manner as the bootstrap filter.
Conduct inference on top-level parameters using particle MCMC
Particle MCMC can be used to conduct inference on the posterior distribution of both the latent states and any top-level parameters of interest in a state space model. The particle marginal Metropolis-Hastings sampler can be specified to jointly sample the a, b, sigPN, and sigOE top level parameters within nimble‘s MCMC framework as follows:
## create MCMC specification for the state space model
stateSpaceMCMCconf <- configureMCMC(stateSpaceModel, nodes = NULL) ## add a block pMCMC sampler for a, b, sigPN, and sigOE
stateSpaceMCMCconf$addSampler(target = c('a', 'b', 'sigPN', 'sigOE'),
type = 'RW_PF_block', control = list(latents = 'x')) ## build and compile pMCMC sampler
stateSpaceMCMC <- buildMCMC(stateSpaceMCMCconf)
compiledList <- compileNimble(stateSpaceModel, stateSpaceMCMC, resetFunctions = TRUE)
## compiling... this may take a minute. Use 'showCompilerOutput = TRUE' to see C++ compiler details.
## compilation finished.
## run compiled sampler for 5000 iterations
compiledList$stateSpaceMCMC$run(5000)
## |-------------|-------------|-------------|-------------|
## |-------------------------------------------------------|
## NULL
## create trace plots for each parameter
library('coda')
par(mfrow = c(2,2))
posteriorSamps <- as.mcmc(as.matrix(compiledList$stateSpaceMCMC$mvSamples))
traceplot(posteriorSamps[,'a'], ylab = 'a')
traceplot(posteriorSamps[,'b'], ylab = 'b')
traceplot(posteriorSamps[,'sigPN'], ylab = 'sigPN')
traceplot(posteriorSamps[,'sigOE'], ylab = 'sigOE')
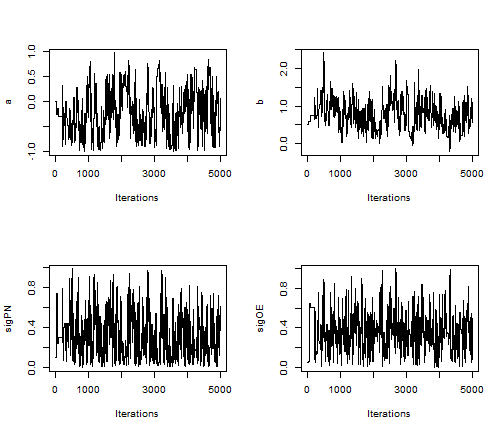
The above RW_PF_block sampler uses a multivariate normal proposal distribution to sample vectors of top-level parameters. To sample a scalar top-level parameter, use the RW_PF sampler instead.
转自:https://r-nimble.org/building-particle-filters-and-particle-mcmc-in-nimble-2
Building Particle Filters and Particle MCMC in NIMBLE的更多相关文章
- Particle Filters
|—粒子滤波原理 |—基础代码的建立—|—前进 | |—转弯 | |—噪音(误差 ...
- 基于粒子滤波的物体跟踪 Particle Filter Object Tracking
Video来源地址 一直都觉得粒子滤波是个挺牛的东西,每次试图看文献都被复杂的数学符号搞得看不下去.一个偶然的机会发现了Rob Hess(http://web.engr.oregonstate.edu ...
- Particle filter for visual tracking
Kalman Filter Cons: Kalman filtering is inadequate because it is based on the unimodal Gaussian dist ...
- Particle 粒子效果使用(适配微信小游戏,particle is not defined)
在微信小游戏中使用粒子效果 参考: 1. 粒子库下载地址 2. 粒子官方使用教程 3. 水友解决微信小游戏particle is not defined 一.下载第三方库 Git地址:https:// ...
- Cesium中级教程9 - Advanced Particle System Effects 高级粒子系统效应
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ 要了解粒子系统的基础知识,请参见粒子系统入门教程. Weathe ...
- Cesium中级教程8 - Introduction to Particle Systems 粒子系统入门
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ What is a particle system? 什么是粒子 ...
- Quick guide for converting from JAGS or BUGS to NIMBLE
Converting to NIMBLE from JAGS, OpenBUGS or WinBUGS NIMBLE is a hierarchical modeling package that u ...
- {ICIP2014}{收录论文列表}
This article come from HEREARS-L1: Learning Tuesday 10:30–12:30; Oral Session; Room: Leonard de Vinc ...
- [SLAM] GMapping SLAM源码阅读(草稿)
目前可以从很多地方得到RBPF的代码,主要看的是Cyrill Stachniss的代码,据此进行理解. Author:Giorgio Grisetti; Cyrill Stachniss http: ...
随机推荐
- AndroidStudio升级后出现Refresh gradle project和connection timed out的原因和解决方法
笔者发现现在升级AndroidStudio不需要FQ了,于是在看到了升级提醒后手贱点击了升级.可悲剧的一幕发生了, 正在写的一个项目从上到下密密麻麻的错误,看了一下提示要求升级Gradle 那就升级吧 ...
- 跟着刚哥梳理java知识点——变量之间的类型转换(四)
变量之间的类型转换主要包括自动类型转换和强制类型转换. 1.自动类型转换:当容量小的数据类型与容量大的数据类型做运算时,容量小的会自动的转换成容量大的类型. [知识点]: a)char,byte,sh ...
- 什么是RESTful?
RESTful一种软件架构风格,设计风格而不是标准,只是提供了一组设计原则和约束条件.它主要用于客户端和服务器交互类的软件.基于这个风格设计的软件可以更简洁,更有层次,更易于实现缓存等机制. REST ...
- php变量布尔值验证
使用 PHP 函数对变量 $x 进行比较 表达式 gettype() empty() is_null() isset() boolean : if($x) $x = ""; str ...
- File类遍历目录及文件
1. 构造函数 File(String args0)//使用一个表示文件或目录的路径的字符串创建一个File对象 File(URL args0)//使用一个URL对象创建File对象 File(Fil ...
- 【PAT_Basic日记】1005. 继续(3n+1)猜想
#include <stdio.h> #include <stdlib.h> /** 逻辑上的清晰和代码上的清晰要合二为一 (1)首先在逻辑上一定要清晰每一步需要干什么, (2 ...
- XSS跨站脚本攻击
1.简介 跨站脚本(cross site script)为了避免与样式css混淆,所以简称为XSS. XSS是一种经常出现在web应用中的计算机安全漏洞,也是web中最主流的攻击方式.那么什么是XSS ...
- 自定义TextView跑马灯
本篇主要介绍TextView的可控制跑马灯效果实现. Android自带的TextView添加几个属性就可以实现跑马灯效果,大概是这样 android:ellipsize="marquee& ...
- EzHttp 流传输调用代码示例
EzHttp框架提供的内置接口,用于文件流等传输 流传输调用代码示例 内置接口: public interface IEzStreamHandler { Task<byte[]> GetD ...
- linux编译安装php7
1.首先下载php7 使用wget命令下载 wget http://cn2.php.net/distributions/php-7.0.12.tar.bz2 2.然后解压 tar -xvf php-7 ...