OpenCV3.4两种立体匹配算法效果对比
以OpenCV自带的Aloe图像对为例:


1.BM算法(Block Matching)
参数设置如下:
int numberOfDisparities = ((imgSize.width / ) + ) & -;
cv::Ptr<cv::StereoBM> bm = cv::StereoBM::create(, );
cv::Rect roi1, roi2;
bm->setROI1(roi1);
bm->setROI2(roi2);
bm->setPreFilterCap();
bm->setBlockSize();
bm->setMinDisparity();
bm->setNumDisparities(numberOfDisparities);
bm->setTextureThreshold();
bm->setUniquenessRatio();
bm->setSpeckleWindowSize();
bm->setSpeckleRange();
bm->setDisp12MaxDiff();
bm->compute(imgL, imgR, disp);
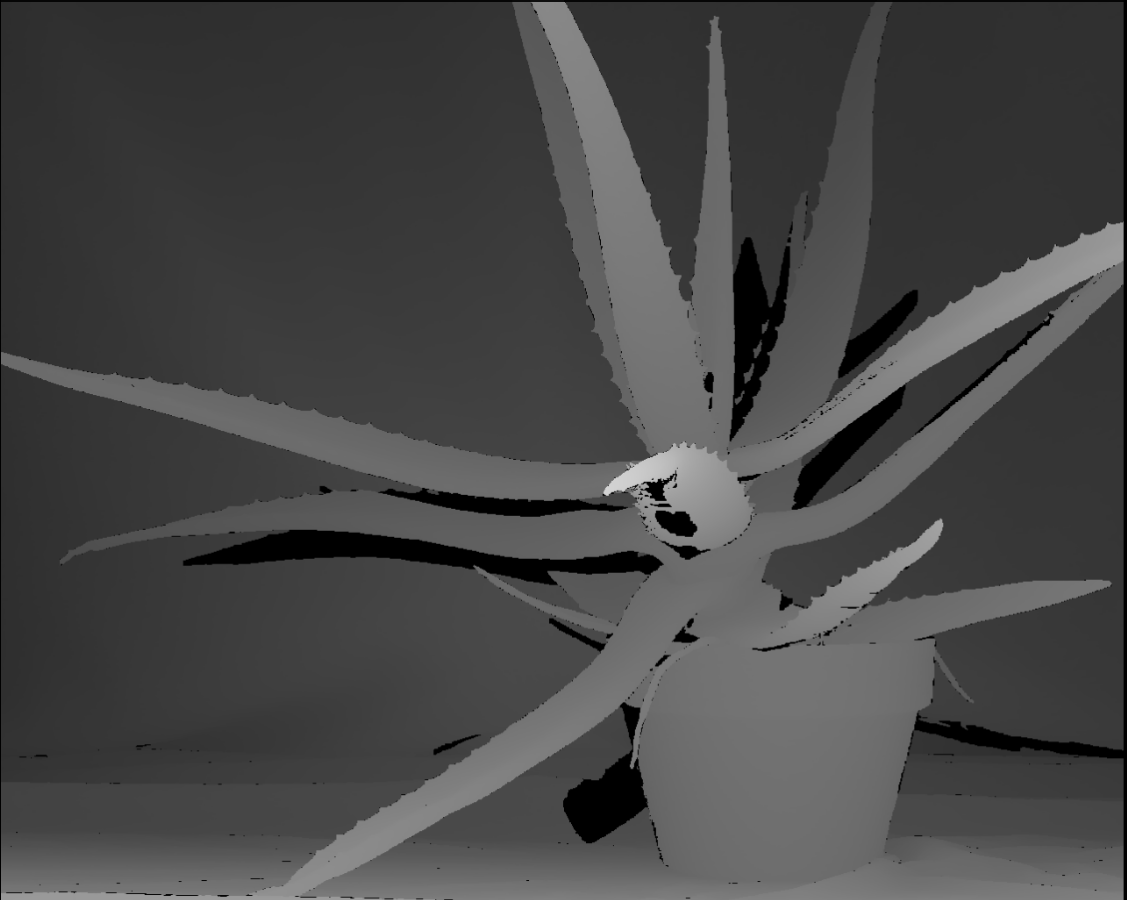
效果如下:
BM算法得到的视差图(左),空洞填充后得到的视差图(右)

2.SGBM(Semi-Global Block matching)算法:
参数设置如下:
enum { STEREO_BM = , STEREO_SGBM = , STEREO_HH = , STEREO_VAR = , STEREO_3WAY = };
int numberOfDisparities = ((imgSize.width / ) + ) & -;
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(, , );
sgbm->setPreFilterCap();
int SADWindowSize = ;
int sgbmWinSize = SADWindowSize > ? SADWindowSize : ;
sgbm->setBlockSize(sgbmWinSize);
int cn = imgL.channels();
sgbm->setP1( * cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2( * cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity();
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio();
sgbm->setSpeckleWindowSize();
sgbm->setSpeckleRange();
sgbm->setDisp12MaxDiff();
int alg = STEREO_SGBM;
if (alg == STEREO_HH)
sgbm->setMode(cv::StereoSGBM::MODE_HH);
else if (alg == STEREO_SGBM)
sgbm->setMode(cv::StereoSGBM::MODE_SGBM);
else if (alg == STEREO_3WAY)
sgbm->setMode(cv::StereoSGBM::MODE_SGBM_3WAY);
sgbm->compute(imgL, imgR, disp);
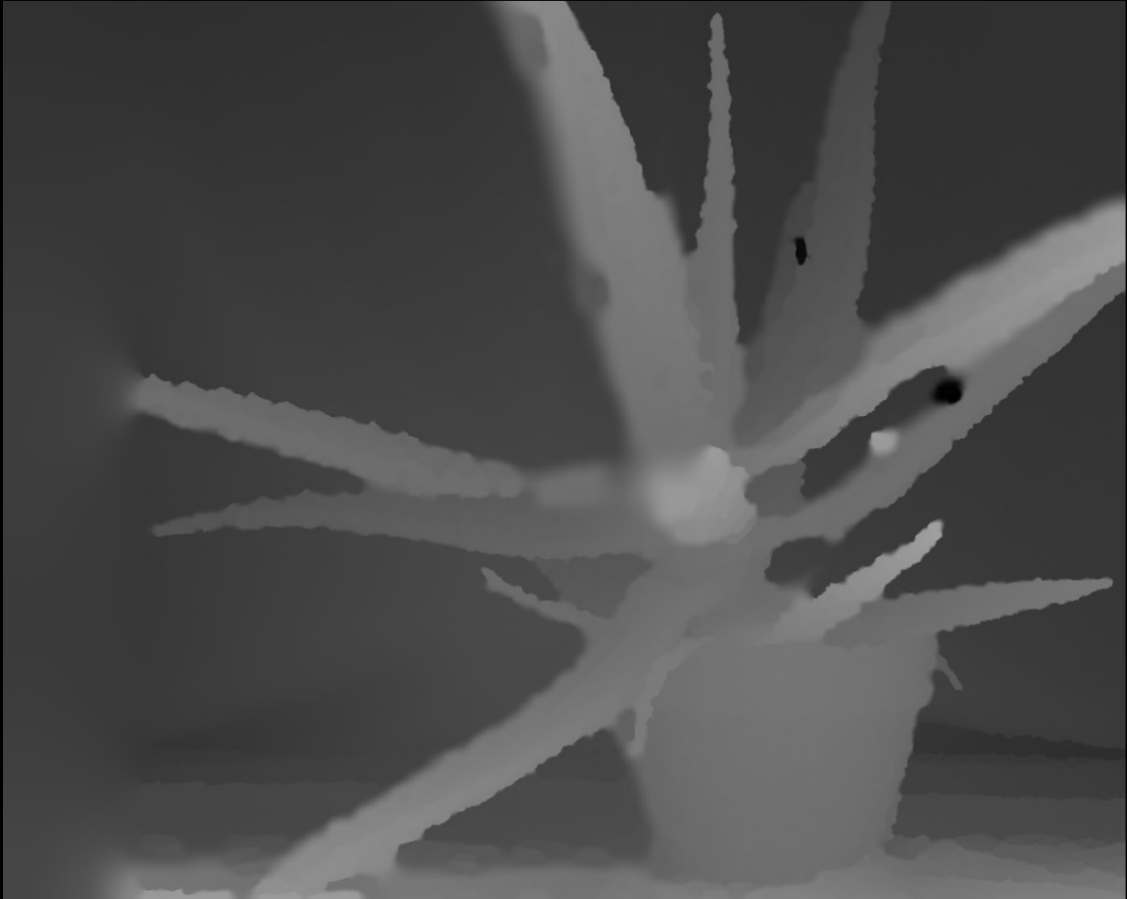
效果如图:
SGBM算法得到的视差图(左),空洞填充后得到的视差图(右)


可见SGBM算法得到的视差图相比于BM算法来说,减少了很多不准确的匹配点,尤其是在深度不连续区域,速度上SGBM要慢于BM算法。OpenCV3.0以后没有实现GC算法,可能是出于速度考虑,以后找时间补上对比图,以及各个算法的详细原理分析。
后面我填充空洞的效果不是很好,如果有更好的方法,望不吝赐教。
preFilterCap()匹配图像预处理
- 两种立体匹配算法都要先对输入图像做预处理,OpenCV源码中中调用函数 static void prefilterXSobel(const cv::Mat& src, cv::Mat& dst, int preFilterCap),参数设置中preFilterCap在此函数中用到。函数步骤如下,作用主要有两点:对于无纹理区域,能够排除噪声干扰;对于边界区域,能够提高边界的区分性,利于后续的匹配代价计算:
- 先利用水平Sobel算子求输入图像x方向的微分值Value;
- 如果Value<-preFilterCap, 则Value=0;
如果Value>preFilterCap,则Value=2*preFilterCap;
如果Value>=-preFilterCap &&Value<=preFilterCap,则Value=Value+preFilterCap; - 输出处理后的图像作为下一步计算匹配代价的输入图像。
static void prefilterXSobel(const cv::Mat& src, cv::Mat& dst, int ftzero)
{
int x, y;
const int OFS = * , TABSZ = OFS * + ;
uchar tab[TABSZ];
cv::Size size = src.size(); for (x = ; x < TABSZ; x++)
tab[x] = (uchar)(x - OFS < -ftzero ? : x - OFS > ftzero ? ftzero * : x - OFS + ftzero);
uchar val0 = tab[ + OFS]; for (y = ; y < size.height - ; y += )
{
const uchar* srow1 = src.ptr<uchar>(y);
const uchar* srow0 = y > ? srow1 - src.step : size.height > ? srow1 + src.step : srow1;
const uchar* srow2 = y < size.height - ? srow1 + src.step : size.height > ? srow1 - src.step : srow1;
const uchar* srow3 = y < size.height - ? srow1 + src.step * : srow1;
uchar* dptr0 = dst.ptr<uchar>(y);
uchar* dptr1 = dptr0 + dst.step; dptr0[] = dptr0[size.width - ] = dptr1[] = dptr1[size.width - ] = val0;
x = ;
for (; x < size.width - ; x++)
{
int d0 = srow0[x + ] - srow0[x - ], d1 = srow1[x + ] - srow1[x - ],
d2 = srow2[x + ] - srow2[x - ], d3 = srow3[x + ] - srow3[x - ];
int v0 = tab[d0 + d1 * + d2 + OFS];
int v1 = tab[d1 + d2 * + d3 + OFS];
dptr0[x] = (uchar)v0;
dptr1[x] = (uchar)v1;
}
} for (; y < size.height; y++)
{
uchar* dptr = dst.ptr<uchar>(y);
x = ;
for (; x < size.width; x++)
dptr[x] = val0;
}
}
自己实现的函数如下:
void mySobelX(cv::Mat srcImg, cv::Mat dstImg, int preFilterCap)
{
assert(srcImg.channels() == );
int radius = ;
int width = srcImg.cols;
int height = srcImg.rows;
uchar *pSrcData = srcImg.data;
uchar *pDstData = dstImg.data;
for (int i = ; i < height; i++)
{
for (int j = ; j < width; j++)
{
int idx = i*width + j;
if (i >= radius && i < height - radius && j >= radius && j < width - radius)
{
int diff0 = pSrcData[(i - )*width + j + ] - pSrcData[(i - )*width + j - ];
int diff1 = pSrcData[i*width + j + ] - pSrcData[i*width + j - ];
int diff2 = pSrcData[(i + )*width + j + ] - pSrcData[(i + )*width + j - ]; int value = diff0 + * diff1 + diff2;
if (value < -preFilterCap)
{
pDstData[idx] = ;
}
else if (value >= -preFilterCap && value <= preFilterCap)
{
pDstData[idx] = uchar(value + preFilterCap);
}
else
{
pDstData[idx] = uchar( * preFilterCap);
} }
else
{
pDstData[idx] = ;
}
}
}
}
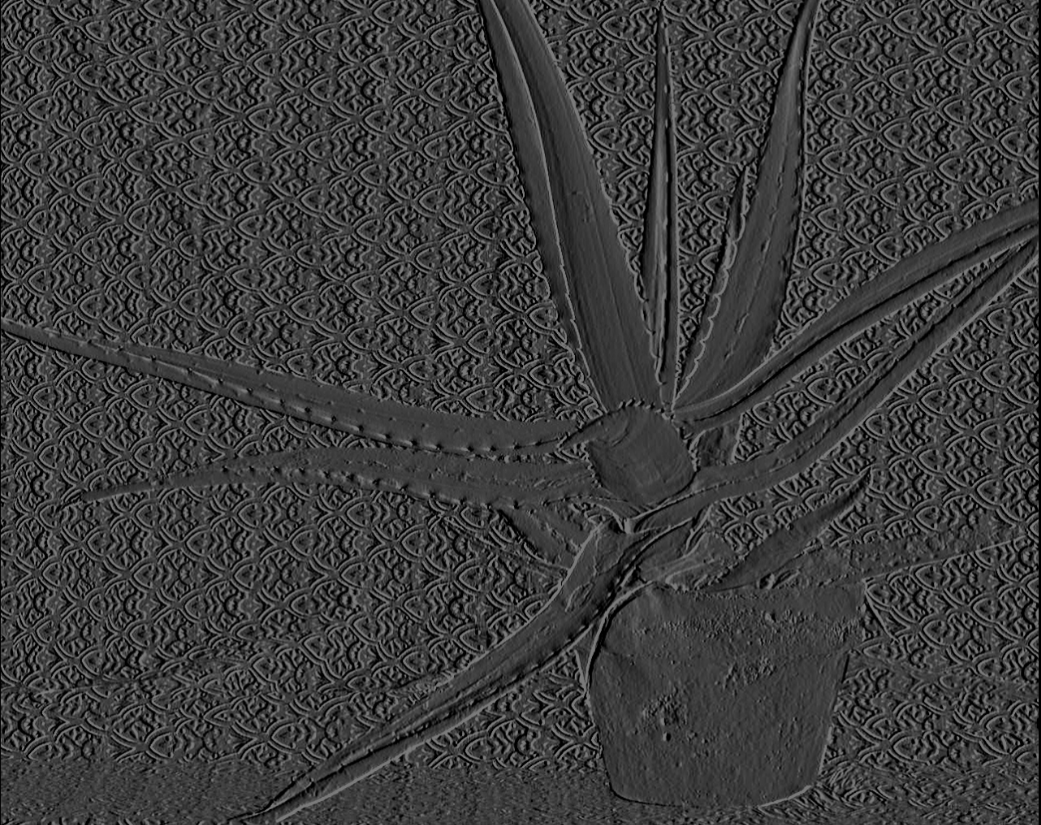
函数输入,输出结果如图:

filterSpeckles()视差图后处理
- 两种立体匹配算法在算出初始视差图后会进行视差图后处理,包括中值滤波,连通域检测等。其中中值滤波能够有效去除视差图中孤立的噪点,而连通域检测能够检测出视差图中因噪声引起小团块(blob)。在BM和SGBM中都有speckleWindowSize和speckleRange这两个参数,speckleWindowSize是指设置检测出的连通域中像素点个数,也就是连通域的大小。speckleRange是指设置判断两个点是否属于同一个连通域的阈值条件。大概流程如下:
- 判断当前像素点四邻域的邻域点与当前像素点的差值diff,如果diff<speckRange,则表示该邻域点与当前像素点是一个连通域,设置一个标记。然后再以该邻域点为中心判断其四邻域点,步骤同上。直至某一像素点四邻域的点均不满足条件,则停止。
- 步骤1完成后,判断被标记的像素点个数count,如果像素点个数count<=speckleWindowSize,则说明该连通域是一个小团块(blob),则将当前像素点值设置为newValue(表示错误的视差值,newValue一般设置为负数或者0值)。否则,表示该连通域是个大团块,不做处理。同时建立标记值与是否为小团块的关系表rtype[label],rtype[label]为0,表示label值对应的像素点属于小团块,为1则不属于小团块。
- 处理下一个像素点时,先判断其是否已经被标记:
如果已经被标记,则根据关系表rtype[label]判断是否为小团块(blob),如果是,则直接将该像素值设置为newValue;如果不是,则不做处理。继续处理下一个像素。
如果没有被标记,则按照步骤1处理。 - 所有像素点处理后,满足条件的区域会被设置为newValue值,后续可以用空洞填充等方法重新估计其视差值。
OpenCV中有对应的API函数,void filterSpeckles(InputOutputArray img, double newVal, int maxSpeckleSize, double maxDiff, InputOutputArray buf=noArray() )
函数源码如下,使用时根据视差图或者深度图数据类型设置模板中的数据类型:
typedef cv::Point_<short> Point2s;
template <typename T> void filterSpecklesImpl(cv::Mat& img, int newVal, int maxSpeckleSize, int maxDiff, cv::Mat& _buf)
{
using namespace cv; int width = img.cols, height = img.rows, npixels = width*height;
size_t bufSize = npixels*(int)(sizeof(Point2s) + sizeof(int) + sizeof(uchar));
if (!_buf.isContinuous() || _buf.empty() || _buf.cols*_buf.rows*_buf.elemSize() < bufSize)
_buf.create(, (int)bufSize, CV_8U); uchar* buf = _buf.ptr();
int i, j, dstep = (int)(img.step / sizeof(T));
int* labels = (int*)buf;
buf += npixels * sizeof(labels[]);
Point2s* wbuf = (Point2s*)buf;
buf += npixels * sizeof(wbuf[]);
uchar* rtype = (uchar*)buf;
int curlabel = ; // clear out label assignments
memset(labels, , npixels * sizeof(labels[])); for (i = ; i < height; i++)
{
T* ds = img.ptr<T>(i);
int* ls = labels + width*i; for (j = ; j < width; j++)
{
if (ds[j] != newVal) // not a bad disparity
{
if (ls[j]) // has a label, check for bad label
{
if (rtype[ls[j]]) // small region, zero out disparity
ds[j] = (T)newVal;
}
// no label, assign and propagate
else
{
Point2s* ws = wbuf; // initialize wavefront
Point2s p((short)j, (short)i); // current pixel
curlabel++; // next label
int count = ; // current region size
ls[j] = curlabel; // wavefront propagation
while (ws >= wbuf) // wavefront not empty
{
count++;
// put neighbors onto wavefront
T* dpp = &img.at<T>(p.y, p.x); //current pixel value
T dp = *dpp;
int* lpp = labels + width*p.y + p.x; //current label value //bot
if (p.y < height - && !lpp[+width] && dpp[+dstep] != newVal && std::abs(dp - dpp[+dstep]) <= maxDiff)
{
lpp[+width] = curlabel;
*ws++ = Point2s(p.x, p.y + );
}
//top
if (p.y > && !lpp[-width] && dpp[-dstep] != newVal && std::abs(dp - dpp[-dstep]) <= maxDiff)
{
lpp[-width] = curlabel;
*ws++ = Point2s(p.x, p.y - );
}
//right
if (p.x < width - && !lpp[+] && dpp[+] != newVal && std::abs(dp - dpp[+]) <= maxDiff)
{
lpp[+] = curlabel;
*ws++ = Point2s(p.x + , p.y);
}
//left
if (p.x > && !lpp[-] && dpp[-] != newVal && std::abs(dp - dpp[-]) <= maxDiff)
{
lpp[-] = curlabel;
*ws++ = Point2s(p.x - , p.y);
} // pop most recent and propagate
// NB: could try least recent, maybe better convergence
p = *--ws;
} // assign label type
if (count <= maxSpeckleSize) // speckle region
{
rtype[ls[j]] = ; // small region label
ds[j] = (T)newVal;
}
else
rtype[ls[j]] = ; // large region label
}
}
}
}
}
或者下面博主自己整理一遍的代码:
typedef cv::Point_<short> Point2s;
template <typename T> void myFilterSpeckles(cv::Mat &img, int newVal, int maxSpeckleSize, int maxDiff)
{
int width = img.cols;
int height = img.rows;
int imgSize = width*height;
int *pLabelBuf = (int*)malloc(sizeof(int)*imgSize);//标记值buffer
Point2s *pPointBuf = (Point2s*)malloc(sizeof(short)*imgSize);//点坐标buffer
uchar *pTypeBuf = (uchar*)malloc(sizeof(uchar)*imgSize);//blob判断标记buffer
//初始化Labelbuffer
int currentLabel = ;
memset(pLabelBuf, , sizeof(int)*imgSize); for (int i = ; i < height; i++)
{
T *pData = img.ptr<T>(i);
int *pLabel = pLabelBuf + width*i;
for (int j = ; j < width; j++)
{
if (pData[j] != newVal)
{
if (pLabel[j])
{
if (pTypeBuf[pLabel[j]])
{
pData[j] = (T)newVal;
}
}
else
{
Point2s *pWave = pPointBuf;
Point2s curPoint((T)j, (T)i);
currentLabel++;
int count = ;
pLabel[j] = currentLabel;
while (pWave >= pPointBuf)
{
count++;
T *pCurPos = &img.at<T>(curPoint.y, curPoint.x);
T curValue = *pCurPos;
int *pCurLabel = pLabelBuf + width*curPoint.y + curPoint.x;
//bot
if (curPoint.y < height - && !pCurLabel[+width] && pCurPos[+width] != newVal && abs(curValue - pCurPos[+width]) <= maxDiff)
{
pCurLabel[+width] = currentLabel;
*pWave++ = Point2s(curPoint.x, curPoint.y + );
}
//top
if (curPoint.y > && !pCurLabel[-width] && pCurPos[-width] != newVal && abs(curValue - pCurPos[-width]) <= maxDiff)
{
pCurLabel[-width] = currentLabel;
*pWave++ = Point2s(curPoint.x, curPoint.y - );
}
//right
if (curPoint.x < width- && !pCurLabel[+] && pCurPos[+] != newVal && abs(curValue - pCurPos[+]) <= maxDiff)
{
pCurLabel[+] = currentLabel;
*pWave++ = Point2s(curPoint.x + , curPoint.y);
}
//left
if (curPoint.x > && !pCurLabel[-] && pCurPos[-] != newVal && abs(curValue - pCurPos[-]) <= maxDiff)
{
pCurLabel[-] = currentLabel;
*pWave++ = Point2s(curPoint.x - , curPoint.y);
} --pWave;
curPoint = *pWave;
} if (count <= maxSpeckleSize)
{
pTypeBuf[pLabel[j]] = ;
pData[j] = (T)newVal;
}
else
{
pTypeBuf[pLabel[j]] = ;
}
}
}
}
} free(pLabelBuf);
free(pPointBuf);
free(pTypeBuf);
}
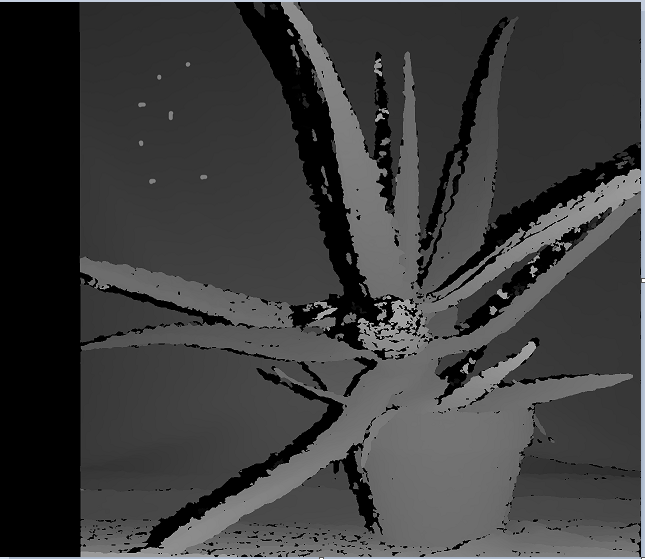
如下视差图中左上角部分有7个小团块,设置speckleWindowSize和speckleRange分别为50和32,连通域检测后结果为如下图右,小团块能够全部检测出来,方便后续用周围视差填充。当然还有一个缺点就是,图像中其他地方尤其是边界区域也会被检测为小团块,后续填充可能会对边界造成平滑。


OpenCV3.4两种立体匹配算法效果对比的更多相关文章
- Java中的ReentrantLock和synchronized两种锁定机制的对比
问题:多个访问线程将需要写入到文件中的数据先保存到一个队列里面,然后由专门的 写出线程负责从队列中取出数据并写入到文件中. http://blog.csdn.net/top_code/article/ ...
- Android代码中设置字体大小,字体颜色,显示两种颜色.倒计时效果
Android代码中设置字体大小,字体颜色,显示两种颜色 在xml文件中字体大小用的像素 <TextView android:id="@+id/uppaid_time" an ...
- Java多线程13:读写锁和两种同步方式的对比
读写锁ReentrantReadWriteLock概述 大型网站中很重要的一块内容就是数据的读写,ReentrantLock虽然具有完全互斥排他的效果(即同一时间只有一个线程正在执行lock后面的任务 ...
- Object-c:两种文件读写的对比
一.读写方法对比:(主要针对本地读取本地文件) 方式\操作 读 写 非URL方式 stringWithContentsOfFile writeToFile URL方式 stringWithConten ...
- onbeforeunload事件两种写法及效果
在符合W3C标准的浏览器里,可以使用addEventListener方法来添加事件. 当不需要为一个事件添加多个处理函数的时候,可以简单的使用onXXX=function(){}的方式来添加事件处理函 ...
- SparkSQL查询程序的两种方法,及其对比
import包: import org.apache.spark.{SparkConf, SparkContext}import org.apache.spark.rdd.RDDimport org. ...
- java多线程之:Java中的ReentrantLock和synchronized两种锁定机制的对比 (转载)
原文:http://www.ibm.com/developerworks/cn/java/j-jtp10264/index.html 多线程和并发性并不是什么新内容,但是 Java 语言设计中的创新之 ...
- Java中的ReentrantLock和synchronized两种锁机制的对比
原文:http://www.ibm.com/developerworks/cn/java/j-jtp10264/index.html 多线程和并发性并不是什么新内容,但是 Java 语言设计中的创新之 ...
- Java ReentrantLock和synchronized两种锁定机制的对比
多线程和并发性并不是什么新内容,但是 Java 语言设计中的创新之一就是,它是第一个直接把跨平台线程模型和正规的内存模型集成到语言中的主流语言.核心类库包含一个 Thread 类,可以用它来构建.启动 ...
随机推荐
- haslayout知多少
我们都知道浏览器有bug,而IE的bug似乎比大多数浏览器都多.IE的表现与其他浏览器不同的原因之一就是,显示引擎使用一个称为布局(layout)的内部概念. 因为布局是专门针对显示引擎内部工作方 ...
- Java源码解读(一)——HashMap
HashMap作为常用的一种数据结构,阅读源码去了解其底层的实现是十分有必要的.在这里也分享自己阅读源码遇到的困难以及自己的思考. HashMap的源码介绍已经有许许多多的博客,这里只记录了一些我看源 ...
- python_第2课
前言 回顾一下python+selenium基础,并整理相关知识点,分享给有需要,在前进道路上的朋友. 由于不是在python中敲的代码,有可能有缩进等相关错误,请自行检查 数据类型 #python中 ...
- Python 数据科学系列 の Numpy、Series 和 DataFrame介绍
本課主題 Numpy 的介绍和操作实战 Series 的介绍和操作实战 DataFrame 的介绍和操作实战 Numpy 的介绍和操作实战 numpy 是 Python 在数据计算领域里很常用的模块 ...
- python3之OS与sys模块
一.Python os模块 包含普遍的操作系统功能,如果你希望你的程序能够与平台无关的话,这个模块是尤为重要的. 1.os.access() 查看文件是否有指定权限,有则返回True否则返回flase ...
- 从零开始开发一个简易的类vue-cli构建工具
代码地址:https://github.com/cheer4chai/webpack-learning 仿照vue-cli开发这个工具的目的是了解webpack的基本设置,以及vue-cli的工作原理 ...
- 优雅的处理Redis访问超时
很长一段时间以来,一直在项目中使用Redis作为辅助存储,确切来说是利用Redis的内存存储,而不是将其作为缓存.比如常见的利用Set集合来判断某个数值是否存在,或者将来自不同请求的数据放在Redis ...
- es6 的循环
for-of 循环 for-of 不能直接用来遍历对象的属性,如果你想遍历对象的属性,你可以使用 for-in 语句(for-in 就是用来干这个的),或者使用下面的方式: for (let key ...
- Educational Codeforces Round 21(A.暴力,B.前缀和,C.贪心)
A. Lucky Year time limit per test:1 second memory limit per test:256 megabytes input:standard input ...
- [51nod1671]货物运输
公元2222年,l国发生了一场战争. 小Y负责领导工人运输物资. 其中有m种物资的运输方案,每种运输方案形如li,ri.表示存在一种货物从li运到ri. 这里有n个城市,第i个城市与第i+1个城市相连 ...