MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生。跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢?
海拔高度测量
对于喜欢登山的人来说,会非常关心自己所处的高度。海拔高度的测量方法,一般常用的有2种方式,一是通过GPS全球定位系统,二是通过测出大气压,然后根据气压值计算出海拔高度。由于受到技术和其它方面原因的限制,GPS计算海拔高度一般误差都会有十米左右,而如果在树林里或者是在悬崖下面时,有时候甚至接收不到GPS卫星信号。而气压的方式可选择的范围会广些,而且可以把成本控制的比较低。在手机原有GPS的基础上再增加气压传感器的功能,可让三维定位更加精准。
最近发现一块好玩的开发板——TPYBoardv702,这个板子可以定位、发短信、打电话,并且板载温湿度传感器、光敏传感器以及蜂鸣器,可以DIY很多有趣的东西,下面我们可以用这个板子加一个气压传感器来做一个小型气象站,来张实物图:
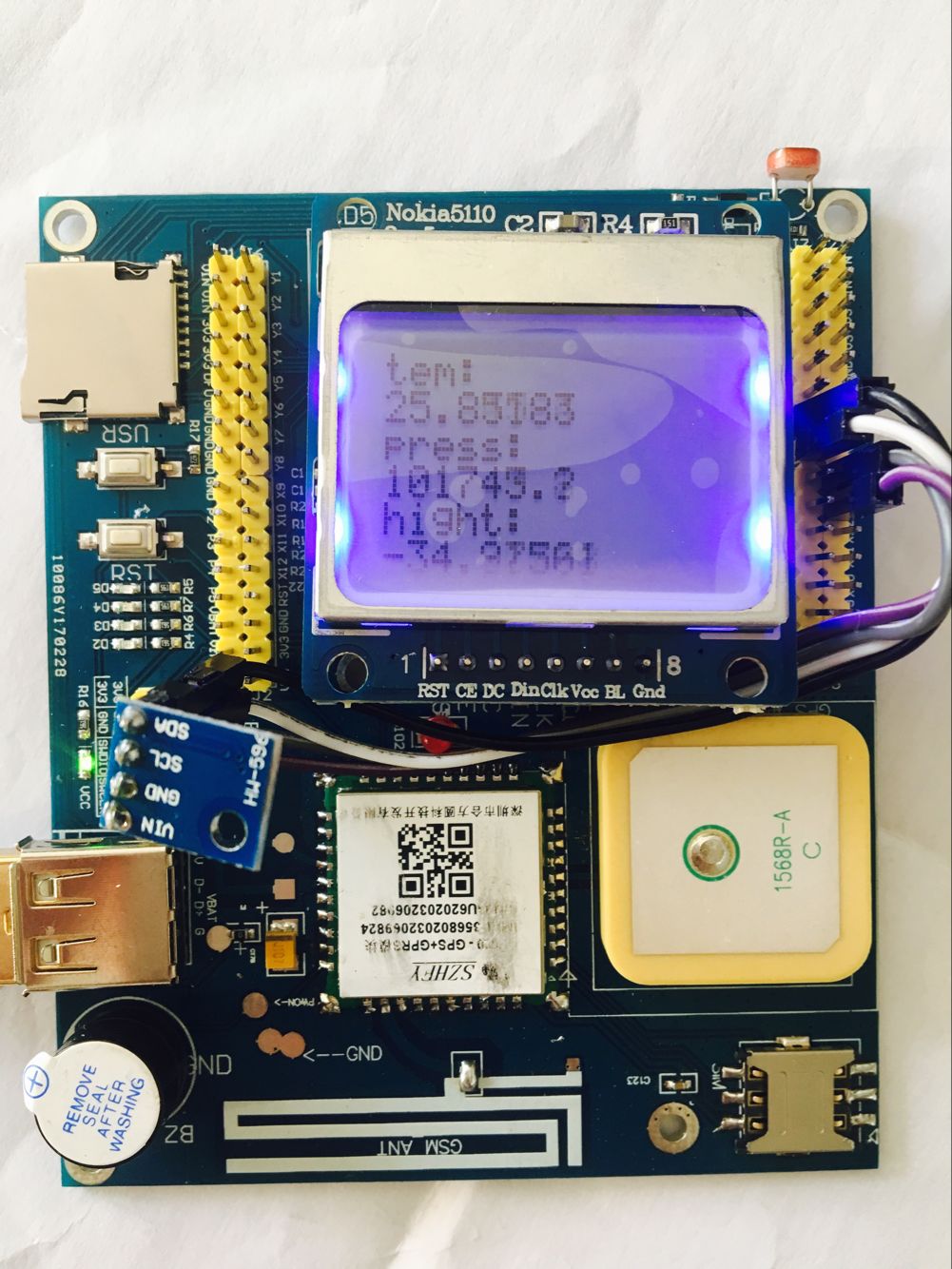
TPYBoardv702
定位功能我就不多说了,如果需要的话可以参考
http://docs.tpyboard.com/zh/latest/tpyboard/tutorial/v702/latitude/。
那么我们利用这块板子跟BMP180气压传感器来做一个小型家庭气象站,来检测当地温度以及当地气压与海拔,如果想做更好玩的东西,可以接其他传感器或者加个继电器来控制其他设备。
BMP180是一直常见的气压传感器,BMP180是一款高精度、小体积、超低能耗的压力传感器,可以应用在移动设备中,它的性能卓越,精度最低可以达到0.03hPa,并且耗电极低,只有3μA;BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。

BMP180实物图
硬件接线图
效果展示图
连接完毕后,将font.py,upcd8544.py与bmp180的库导入,就可以通过以下方法分别读取温度、气压、海拔高度了。
源代码
foot.py,upcd8544.py库的下载地址
http://www.tpyboard.com/support/studyexample14/206.html
导入需要的类库,编辑好main.py,直接运行就ok了,下面是main.py的程序源码
# main.py -- put your code here!
import pyb
import upcd8544
from machine import SPI,Pin
from ubinascii import hexlify
from ubinascii import *
from bmp180 import BMP180 bmp=BMP180(2)
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('X20')
CE = pyb.Pin('X19')
DC = pyb.Pin('X18')
LIGHT = pyb.Pin('X17')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT) while True:
tem=bmp.getTemp()
press=bmp.getPress()
altitude=bmp.getAltitude()
lcd_5110.lcd_write_string('Tem:',0,0)
lcd_5110.lcd_write_string(str(tem),0,1)
lcd_5110.lcd_write_string('C',65,1)
lcd_5110.lcd_write_string('Press:',0,2)
lcd_5110.lcd_write_string(str(press),0,3)
lcd_5110.lcd_write_string('Pa',65,3)
lcd_5110.lcd_write_string('Hight:',0,4)
lcd_5110.lcd_write_string(str(altitude),0,5)
lcd_5110.lcd_write_string('M',65,5) bmp180.py库的源码 import pyb
from pyb import I2C BMP180_I2C_ADDR = const(0x77)
class BMP180():
def __init__(self, i2c_num):
self.i2c = I2C(i2c_num, I2C.MASTER, baudrate = 100000)
self.AC1 = self.short(self.get2Reg(0xAA))
self.AC2 = self.short(self.get2Reg(0xAC))
self.AC3 = self.short(self.get2Reg(0xAE))
self.AC4 = self.get2Reg(0xB0)
self.AC5 = self.get2Reg(0xB2)
self.AC6 = self.get2Reg(0xB4)
self.B1 = self.short(self.get2Reg(0xB6))
self.B2 = self.short(self.get2Reg(0xB8))
self.MB = self.short(self.get2Reg(0xBA))
self.MC = self.short(self.get2Reg(0xBC))
self.MD = self.short(self.get2Reg(0xBE))
self.UT = 0
self.UP = 0
self.B3 = 0
self.B4 = 0
self.B5 = 0
self.B6 = 0
self.B7 = 0
self.X1 = 0
self.X2 = 0
self.X3 = 0 def short(self, dat):
if dat > 32767:
return dat - 65536
else:
return dat def setReg(self, dat, reg):
buf = bytearray(2)
buf[0] = reg
buf[1] = dat
self.i2c.send(buf, BMP180_I2C_ADDR) def getReg(self, reg):
buf = bytearray(1)
buf[0] = reg
self.i2c.send(buf, BMP180_I2C_ADDR)
t = self.i2c.recv(1, BMP180_I2C_ADDR)
return t[0] def get2Reg(self, reg):
a = self.getReg(reg)
b = self.getReg(reg + 1)
return a*256 + b def measure(self):
self.setReg(0x2E, 0xF4)
pyb.delay(5)
self.UT = self.get2Reg(0xF6)
self.setReg(0x34, 0xF4)
pyb.delay(5)
self.UP = self.get2Reg(0xF6) def getTemp(self):
self.measure()
self.X1 = (self.UT - self.AC6) * self.AC5/(1<<15)
self.X2 = self.MC * (1<<11) / (self.X1 + self.MD)
self.B5 = self.X1 + self.X2
return (self.B5 + 8)/160 def getPress(self):
self.getTemp()
self.B6 = self.B5 - 4000
self.X1 = (self.B2 * (self.B6*self.B6/(1<<12))) / (1<<11)
self.X2 = (self.AC2 * self.B6)/(1<<11)
self.X3 = self.X1 + self.X2
self.B3 = ((self.AC1*4+self.X3) + 2)/4
self.X1 = self.AC3 * self.B6 / (1<<13)
self.X2 = (self.B1 * (self.B6*self.B6/(1<<12))) / (1<<16)
self.X3 = (self.X1 + self.X2 + 2)/4
self.B4 = self.AC4 * (self.X3 + 32768)/(1<<15)
self.B7 = (self.UP-self.B3) * 50000
if self.B7 < 0x80000000:
p = (self.B7*2)/self.B4
else:
p = (self.B7/self.B4) * 2
self.X1 = (p/(1<<8))*(p/(1<<8))
self.X1 = (self.X1 * 3038)/(1<<16)
self.X2 = (-7357*p)/(1<<16)
p = p + (self.X1 + self.X2 + 3791)/16
return p def getAltitude(self):
p = self.getPress()
return (44330*(1-(p/101325)**(1/5.255))) def get(self):
t = []
t.append(self.getPress())
t.append(self.getAltitude())
t.append(self.getTemp())
return t
MicroPython教程之TPYBoard开发板DIY小型家庭气象站的更多相关文章
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- [MicroPython]TPYBoard开发板DIY小型家庭气象站
对于喜欢登山的人来说,都会非常关心自己所处的高度跟温度,海拔高度的测量方法,海拔测量一般常用的有两种方式,一是通过GPS全球定位系统,二是通过测出大气压,根据气压值算出海拔高度. BMP180是一直常 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- MicroPython实例之TPYBoard开发板控制OLED显示中文
0x00 前言 之前看到一篇文章是关于TPYBoard v102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近利用空余时间搞定了这个实验,特此将实验过程及源码分享出来,方便以 ...
- HealthKit开发快速入门教程之HealthKit开发概述简介
HealthKit开发快速入门教程之HealthKit开发概述简介 2014年6月2日召开的年度开发者大会上,苹果发布了一款新的移动应用平台,可以收集和分析用户的健康数据.该移动应用平台被命名为“He ...
- TPYBoard开发板搭建与阿里云服务发送数据
今天给大家带来的是TPYBoard V202开发板的一次测试项目使用心得.而测试项目就是给服务端发送硬件底层数据,而数据有产品名称,WF模块MAC地址,温湿度数据. 什么是MicroP ...
- Xamarin Anroid开发教程之Anroid开发工具及应用介绍
Xamarin Anroid开发教程之Anroid开发工具及应用介绍 Xamarin开发Anroid应用介绍 如今智能手机已经盛行了好几年,而针对这些智能手机的软件开发也变得异常火热.但是在Andro ...
随机推荐
- Express4.x API (二):Request (译)
写在前面 最近学习express想要系统的过一遍API,www.expressjs.com是express英文官网(进入www.epxressjs.com.cn发现也是只有前几句话是中文呀~~),所以 ...
- java线程池的创建使用
利用java的多线程编程可以大大的提高系统的并发运行效率,线程越多并发执行的任务就越多,但是并不意味着效率会一直提高,相反会得到适得其反的效果. java中的多线程编程一共有三种方法: 继承Threa ...
- hdu 5225 Tom and permutation(回溯)
题目链接:hdu 5225 Tom and permutation #include <cstdio> #include <cstring> #include <algo ...
- 2015级C++第4周项目 函数
[项目1-求最大公约数] 參考解答 (1)输入两个数.并求出其最大公约数 #include <iostream> using namespace std; //自己定义函数的原型(即函数声 ...
- 对使用多个swiper下标有时显示不出来的问题
这久写了一个网页,其中有很多的轮播图及tab页面切换,就使用了swiper框架,有时一个网页要用到6-8个,如此就出现了下图这种问题: 有时刷新看不到,有时又能看到,tab切换过去的页面也看不到,其实 ...
- 自学Python3.3-字符串格式化 作用域 递归
一.字符串格式化 二.作用域 三.递归
- 自学Python2.4-基本数据类型-字典dict(objct)
Python dict方法总结 一.字典介绍 1.字典概述 ①字典是python中唯一内建的映射类型.又称关联数组或散列②映射类型对象里哈希值(键,key)和指向的对象(值,value)是一对多的的关 ...
- 关于scrapy的piplines
1.进入setting中把ITEM_piplines文件注销去掉 2.在piplines中写好代码 # -*- coding: utf- -*- # Define your item pipeline ...
- Html 段落自动换行
1.段落换行 在 Html 中,关于段落换行,是我们经常遇见的问题,那么正如我下图没加换行代码所示: 在网页上的显示的样式,是这样的: 你可以看见,原本的样式,不会自动换行.在 div 中,加入一个样 ...
- 【java设计模式】【行为模式Behavioral Pattern】模板方法模式Template Method Pattern
package com.tn.pattern; public class Client { public static void main(String[] args) { AbstractClass ...