OpenCV探索之路(六):边缘检测(canny、sobel、laplacian)
边缘检测的一般步骤:
- 滤波——消除噪声
- 增强——使边界轮廓更加明显
- 检测——选出边缘点
Canny算法
Canny边缘检测算法被很多人推崇为当今最优秀的边缘检测算法,所以我们第一个就介绍他。
opencv中提供了Canny函数。
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat DstPic, edge, grayImage;
//创建与src同类型和同大小的矩阵
DstPic.create(img.size(), img.type());
//将原始图转化为灰度图
cvtColor(img, grayImage, COLOR_BGR2GRAY);
//先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//运行canny算子
Canny(edge, edge, 3, 9, 3);
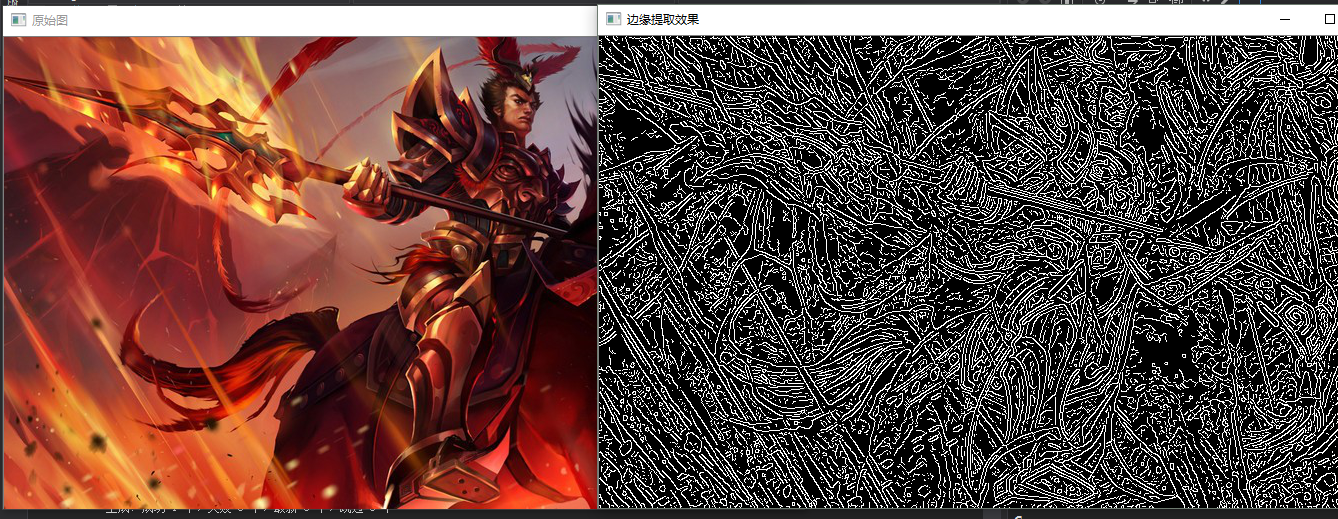
imshow("边缘提取效果", edge);
waitKey(0);
}
看了canny算法提取的轮廓图,感觉真是厉害,居然把那么细致的额轮廓都提取出来了!
Sobel算法
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y, dst;
//求x方向梯度
Sobel(img, grad_x, CV_16S, 1, 0, 3, 1, 1,BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
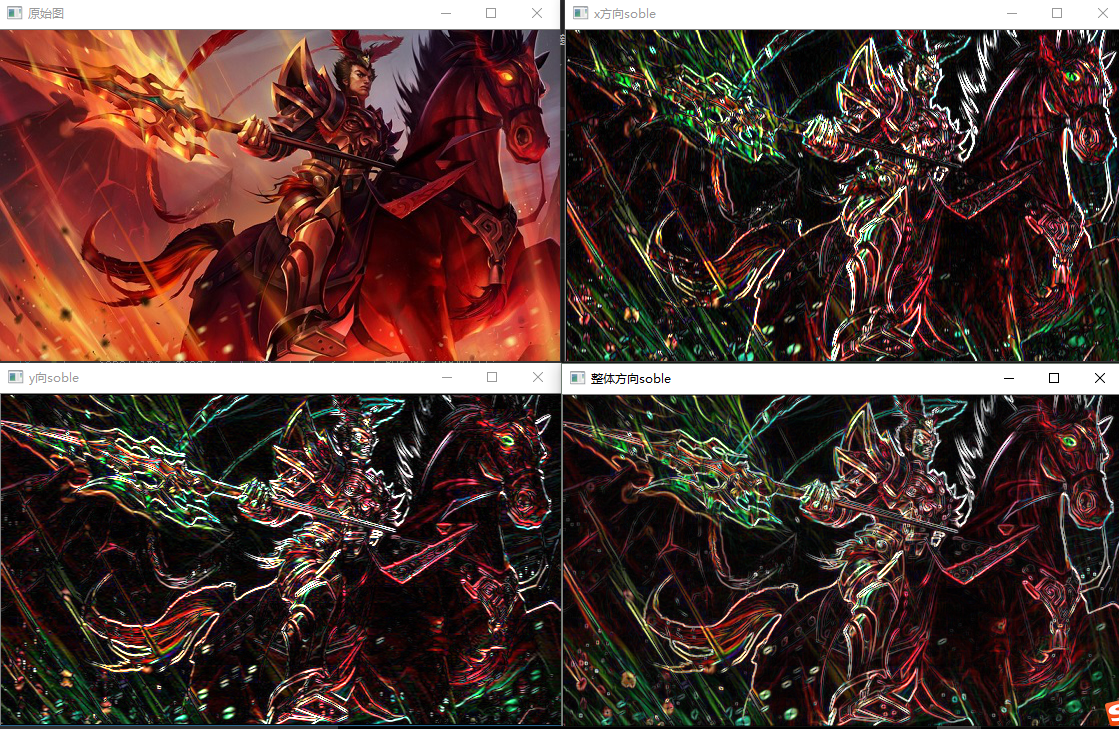
imshow("x方向soble", abs_grad_x);
//求y方向梯度
Sobel(img, grad_y,CV_16S,0, 1,3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(grad_y,abs_grad_y);
imshow("y向soble", abs_grad_y);
//合并梯度
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst);
imshow("整体方向soble", dst);
waitKey(0);
}
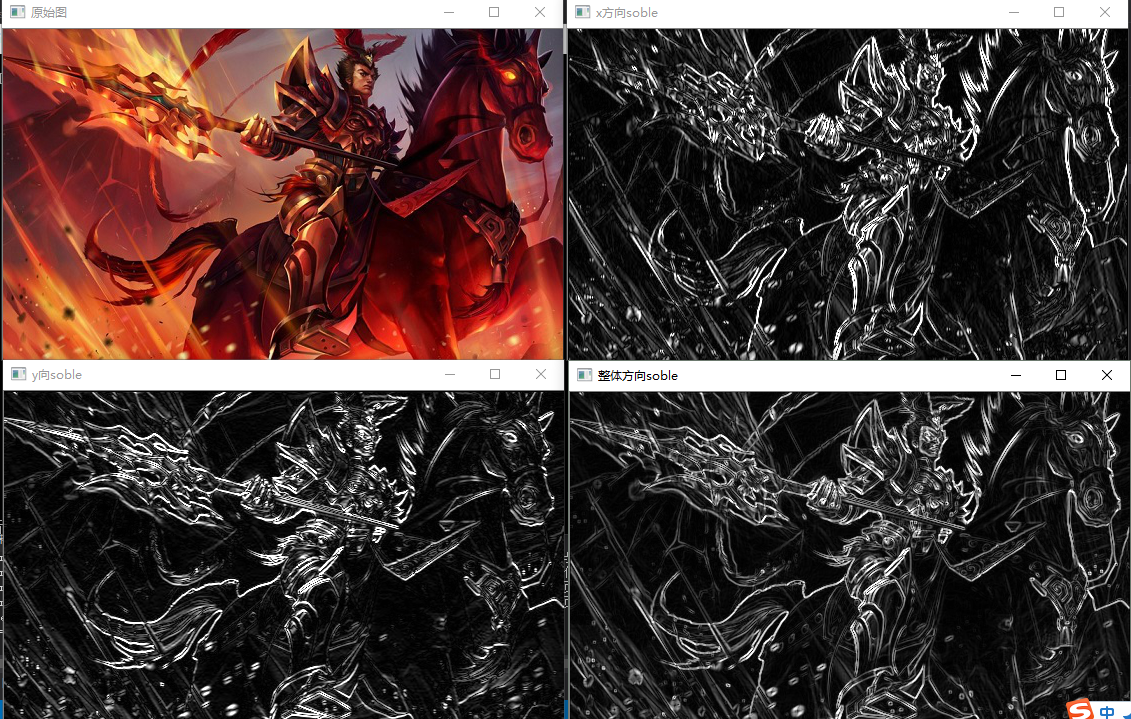
通过下图可以看出,sobel的轮廓提取明显有没cnany的那么细致,只是把一些明显轮廓的边缘提取出来了,看起来会更舒服一点。
灰度图的效果
Laplacian算法
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat gray, dst,abs_dst;
//高斯滤波消除噪声
GaussianBlur(img, img, Size(3, 3), 0, 0, BORDER_DEFAULT);
//转换为灰度图
cvtColor(img, gray, COLOR_RGB2GRAY);
//使用Laplace函数
//第三个参数:目标图像深度;第四个参数:滤波器孔径尺寸;第五个参数:比例因子;第六个参数:表示结果存入目标图
Laplacian(gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转为8位
convertScaleAbs(dst, abs_dst);
imshow("laplace效果图", abs_dst);
waitKey(0);
}
但是感觉效果一般,图像变得模糊了。

OpenCV探索之路(六):边缘检测(canny、sobel、laplacian)的更多相关文章
- [OpenCV] 2、边缘检测 canny
>_<" 边缘检测代码:
- opencv学习之边缘检测
边缘检测 是图像处理 过程中经常会涉及到的一个环节.而在计算机视觉 和 机器学习领域,边缘检测 用于 特征提取 和 特征检测 效果也是特别明显.而 openCV 中进行边缘检测的 算法 真是五花八门, ...
- OpenCV探索之路(七):霍夫变换
我们如何在图像中快速识别出其中的圆和直线?一个非常有效的方法就是霍夫变换,它是图像中识别各种几何形状的基本算法之一. 霍夫线变换 霍夫线变换是一种在图像中寻找直线的方法.OpenCV中支持三种霍夫线变 ...
- OpenCV探索之路(二十四)图像拼接和图像融合技术
图像拼接在实际的应用场景很广,比如无人机航拍,遥感图像等等,图像拼接是进一步做图像理解基础步骤,拼接效果的好坏直接影响接下来的工作,所以一个好的图像拼接算法非常重要. 再举一个身边的例子吧,你用你的手 ...
- OpenCV——边缘检测(sobel算子、Laplacian算子、scharr滤波器)
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- 【OpenCV】边缘检测:Sobel、拉普拉斯算子
推荐博文,博客.写得很好,给个赞. Reference Link : http://blog.csdn.net/xiaowei_cqu/article/details/7829481 一阶导数法:梯度 ...
- openCV(四)---Canny边缘检测
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘. 直接上代码,函数简介都在代码注释中 //canny边缘检测 -(void) ...
- OpenCV学习代码记录——canny边缘检测
很久之前学习过一段时间的OpenCV,当时没有做什么笔记,但是代码都还在,这里把它贴出来做个记录. 代码放在码云上,地址在这里https://gitee.com/solym/OpenCVTest/tr ...
- OpenCV学习笔记(11)——Canny边缘检测
了解Canny边缘检测的概念 1.原理 Canny边缘检测是一种非常流行的边缘检测算法,是 John F.Canny在1986年提出的.它是一个有很多步构成的算法 1)噪声去除 使用5*5的高斯滤波器 ...
随机推荐
- vue.js中,input和textarea上的v-model指令到底做了什么?
v-model是 vue.js 中用于在表单表单元素上创建双向数据绑定,它的本质只是一个语法糖,在单向数据绑定的基础上,增加了监听用户输入事件并更新数据的功能: 对,它本质上只是一个语法糖,但到底是一 ...
- Java基础—String类小结
一.String类是什么 public final class String implements java.io.Serializable, Comparable<String>, Ch ...
- 在Windows下安装redis扩展和memcached扩展
一.php安装redis扩展 1.使用phpinfo()函数查看PHP的版本信息,这会决定扩展文件版本 2.根据PHP版本号,编译器版本号和CPU架构, 选择php_redis-2.2 ...
- knockout中viewmodel跟子model相互调用
用knockout写前端复杂js逻辑的确很方便,而且html界面也很清爽. 在ko中对于复杂的业务逻辑我会给viewmodel创建一些子model对象,但是viewmodel跟子model怎样相互调用 ...
- js的几大数据类型
一. js的几大数据类型 数字:浮点数(3.14)+整数(1): 字符串:包括由任意数量字符组成的序列,例如:'a','one': 布尔值:true+false: undefined:当我们试图访问一 ...
- HttpClient研究学习总结
Http协议非常的重要,HttpClient相比传统JDK自带的URLConnection,增加了易用性和灵活性(具体区别,日后我们再讨论),它不仅是客户端发送Http请求变得容易,而且也方便了开发人 ...
- 作死上CODEVS,青铜题
题面:输入一列整数,输出它们的总和.最大值.最小值.并从大到小输出. 先上一波伪代码,认真地做一波数组排序题. #include<stdio.h> #include<math.h&g ...
- iOS开发 - Swift实现清除缓存功能
前言: 开发移动应用时,请求网络资源是再常见不过的功能.如果每次都去请求,不但浪费时间,用户体验也会变差,所以移动应用都会做离线缓存处理,其中已图片缓存最为常见. 但是时间长了,离线缓存会占用大量的手 ...
- 多个php版本的composer使用
由于系统环境变量之前同事安装的laravel是5.1...php默认的环境变量是: 不想破话原有环境变量,因为现在新的项目是laravel5.4...所以在用默认composer require安装时 ...
- 关于 vue.js 运行环境的搭建(mac)
由于本人使用的是mac系统,因此在vue.js 的环境搭建上遇到许许多多的坑.感谢 showonne.yubang 技术指导,最终成功解决.下面是个人的搭建过程,权当是做个笔记吧. 由于mac非常人性 ...