ZYNQ 驱动初始化套路--UART串口
@
套路如下:
1、定义硬件信息结构体
namePs_Config *Config;
2、定义驱动信息结构体
namePs name_Ps;
3、根据设备号和自动生成的硬件.c文件,获取外设硬件信息
Config = namePs_LookupConfig(DEVICE_ID); //uart0、SD0都是0,uart1、SD1都是1
4、调用外设初始化函数对name_Ps赋值,后期就只需用name_Ps进行各种操作了!
Status = namePs_CfgInitialize(&name_Ps, Config, Config->BaseAddress);
if (Status != XST_SUCCESS)
{
return XST_FAILURE;
}
5、这一步不同外设就不同了:调用配置函数对外设进行配置,例如uart就设置波特率等,MIO就设置输入输出等。。。
UART 串口
ZYNQ使用的UART1,在PL中使能。使用时想在PS改下串口波特率,发现代码中没有串口初始化函数。
BSP中有串口初始化函数,是以中断方式初始化的,但是没有调用。
int UartPDSA_Initiation(XScuGic *IntcInstPtr, XUartPDSA *xptrUartRs232, u16 DeviceId, u16 UartIntrId)
后使用如下代码,加在main()函数中即可改变波特率:
XUartPs_Config *Config;
XUartPs Uart_Ps;
Config = XUartPs_LookupConfig(1);//UART0写0,UART1写1
if (NULL == Config)
{
return XST_FAILURE;
}
Status = XUartPs_CfgInitialize(&Uart_Ps, Config, Config->BaseAddress);
if (Status != XST_SUCCESS)
{
return XST_FAILURE;
}
XUartPs_SetBaudRate(&Uart_Ps, 128000);//写入想用的波特率
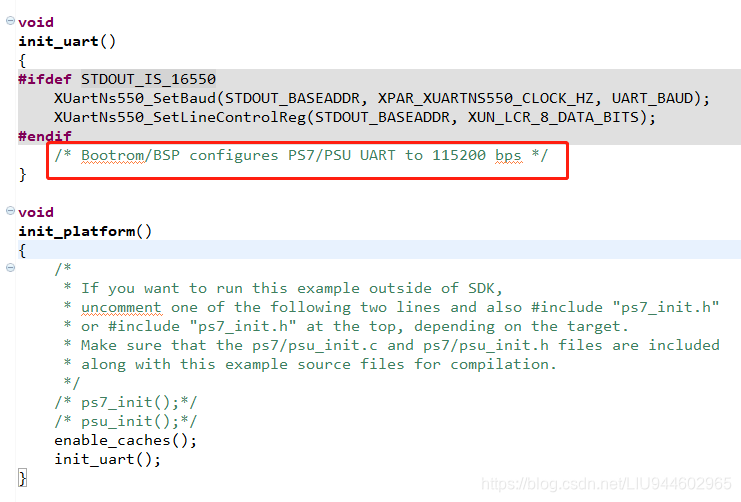
是PL完成了串口初始化?SDK 的BSP完成的初始化?
偶然在官方例程发现:UART被bootrom初始化完成:
GPIO之 MIO控制 LED
MIO0、7、8接LED灯
#include "xparameters.h" //器件参数信息
#include "xstatus.h" //包含XST_FAILURE和XST_SUCCESS的宏定义
#include "xil_printf.h" //包含print()函数
#include "xgpiops.h" //包含PS GPIO的函数声明
#include "sleep.h" //包含sleep()函数
//宏定义GPIO_DEVICE_ID
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID
//连接到MIO的LED
#define MIOLED0 7 //连接到MIO7
#define MIOLED1 8 //连接到MIO8
#define MIOLED2 0 //连接到MIO0
XGpioPs Gpio; // GPIO设备的驱动程序实例
int main()
{
int Status;
XGpioPs_Config *ConfigPtr;
print("MIO Test! \n\r");
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr,
ConfigPtr->BaseAddr);
if (Status != XST_SUCCESS){
return XST_FAILURE;
}
//设置指定引脚的方向:0输入,1输出
XGpioPs_SetDirectionPin(&Gpio, MIOLED0, 1);
XGpioPs_SetDirectionPin(&Gpio, MIOLED1, 1);
XGpioPs_SetDirectionPin(&Gpio, MIOLED2, 1);
//使能指定引脚输出:0禁止输出使能,1使能输出
XGpioPs_SetOutputEnablePin(&Gpio, MIOLED0, 1);
XGpioPs_SetOutputEnablePin(&Gpio, MIOLED1, 1);
XGpioPs_SetOutputEnablePin(&Gpio, MIOLED2, 1);
while (1) {
XGpioPs_WritePin(&Gpio, MIOLED0, 0x0); //向指定引脚写入数据:0或1
XGpioPs_WritePin(&Gpio, MIOLED1, 0x0);
XGpioPs_WritePin(&Gpio, MIOLED2, 0x0);
sleep(1); //延时1秒
XGpioPs_WritePin(&Gpio, MIOLED0, 0x1);
XGpioPs_WritePin(&Gpio, MIOLED1, 0x1);
XGpioPs_WritePin(&Gpio, MIOLED2, 0x1);
sleep(1);
}
return XST_SUCCESS;
}
ZYNQ 驱动初始化套路--UART串口的更多相关文章
- ARM-Linux S5PV210 UART驱动(5)----串口的open操作(tty_open、uart_open)
串口驱动初始化后,串口作为字符驱动也已经注册到系统了,/dev目录下也有设备文件节点了. 那接下来uart的操作是如何进行的呢? 操作硬件之前都是要先open设备,先来分析下这里的open函数具体做了 ...
- ARM-Linux S5PV210 UART驱动(4)----串口驱动初始化过程
对于S5PV210 UART驱动来说,主要关心的就是drivers/serial下的samsung.c和s5pv210.c连个文件. 由drivers/serial/Kconfig: config S ...
- linux UART串口驱动开发文档
转:http://www.360doc.com/content/10/0417/18/829197_23519037.shtml linux UART串口驱动开发文档时间:2010-01-09 14: ...
- ARM-Linux S5PV210 UART驱动(3)----串口核心层、关键结构体、接口关系
尽管一个特定的UART设备驱动完全可以按照tty驱动的设计方法来设计,即定义tty_driver并实现tty_operations其中的成员函数,但是Linux已经在文件serial_core.c中实 ...
- 《连载 | 物联网框架ServerSuperIO教程》-4.如开发一套设备驱动,同时支持串口和网络通讯。附:将来支持Windows 10 IOT
1.C#跨平台物联网通讯框架ServerSuperIO(SSIO)介绍 <连载 | 物联网框架ServerSuperIO教程>1.4种通讯模式机制. <连载 | 物联网框架Serve ...
- (三) UART 串口通讯
UART : university asynchronous receiver and transmitter UART // 通用异步接收器和发送器 为什么要有串口:因为许多嵌入式设备没有显示屏 ...
- 【C51】UART串口通信
我们常需要单片机和其他模块进行通信,数据传输,常用的方式就是串口通信技术. 常用来 单片机<-->电脑, 单片机<-->单片机之间通信. 串行通信 versus 并行通信 并 ...
- Uart串口
title: Uart串口 tags: ARM date: 2018-10-20 16:38:28 --- Uart串口 和单片机的应用没什么区别,首先设置IO复用,设置波特率和数据位,以及中断相关的 ...
- 第十六章 IIC协议详解+UART串口读写EEPROM
十六.IIC协议详解+Uart串口读写EEPROM 本文由杭电网友曾凯峰根据小梅哥FPGA IIC协议基本概念公开课内容整理并最终编写Verilog代码实现使用串口读写EEPROM的功能. 以下为原文 ...
随机推荐
- 20161206日更新CocoaPods版本
从网上下载的工程第三方库需要更新,但当我执行pod update时提示以下错误: [!] The `master` repo requires CocoaPods 1.0.0 - (currentl ...
- windows server2012搭建邮箱服务器+客户端界面(hmailserver+afterlogic)+批量创建邮箱
1.简介 由于需要较多邮箱,如果去注册需要很多的手机号码去验证,一个人不可能买一堆的手机号,所以自己搭建一个邮箱服务器可以大批量的创建自己的邮箱账号和收发邮件. 2.安装部署hmailserver 下 ...
- Bootstrap提供的CDN服务标签与下载文档
目录 1.引入Bootstrap提供的CDN服务 1.选择下载Bootstrap CDN 二:下载Bootstrap官方文档 1.进入Bootstrap官网,选择3版本中文档. 1.引入Bootstr ...
- Solution -「Ynoi 2018」「洛谷 P4117」五彩斑斓的世界
\(\mathcal{Description}\) Link. 给定序列 \(\{a_n\}\),处理 \(m\) 次操作: 给定 \(l,r,x\),把 \([l,r]\) 内所有 \(&g ...
- Dump Lsass内存转储新旧方法
之前看到一篇关于Lsass内存dump的文章,学习记录一下. lsass.exe(Local Security Authority Subsystem Service)进程空间中,存有着机器的 ...
- 请你说说Spring
一. Spring是什么? 是一个轻量级的开源容器框架,用来装JavaBean,可以把其他的一些框架进行整合使用,使得开发更快,更简洁. 轻量级:占用空间小,非入侵式的(Spring中的对象不依赖于S ...
- shell脚本部署zookeeper-3.4.10 [含注释]
文章目录 zk_install.sh conf/config conf/zoo_template.cfg package zk_install.sh #!/bin/bash base_path=$(c ...
- c++ 文本处理
c++ 文本处理 1.使用sstream版本 (1)功能:截取第一列为1以后的数据,如下图,截取第5行(包括第5行)以后的数据,前面4行数据丢弃. (2)代码:textProc.cc #include ...
- vue中按需引入Element-ui
安装 1.安装element-ui:npm i element-ui -S. 2.安装babel-plugin-component:npm install babel-plugin-component ...
- 华为eNSP无限井号#解决方法
如下图所示,允许ensp相关应用通过防火墙